王东锐 殷荣幸
摘 要:通过对焊接机器人在示教编程过程中示教点位置精度的研究,找出影响焊接机器人示教精度的因素,并提出具体的解决办法,从而让焊接机器人快速示教编程成为现实。
关键词:焊接机器人;示教点;示教精度;解决办法
中图分类号:TB 文献标识码:Adoi:10.19311/j.cnki.1672-3198.2020.03.092
0 前言
近几年随着劳动力成本的提高,以廉价劳动力为支撑的“中国制造”经济模式难以为继。作为“工业栽缝”的焊接,是工业生产中不可缺少的加工手段;同时,由于焊接烟尘、弧光、金属飞溅等的存在,主动学习焊接或者从事焊接方面工作的人员也比较少。在这种情况下,采用机器人焊接是解决目前我国经济发展过程中焊接人员缺失的最有效方法。
焊接机器人在使用过程中,主要利用示教编程进行焊接程序的编写,既通过人来操作示教器,引导机器人记录需要焊接的路径。而示教点位置的精度直接影响到焊接机器人焊接的质量,从而决定了焊接机器人的焊接效率。如何解决焊接机器人示教过程中示教点的精度就尤为重要。
1 焊接机器人的示教过程
焊接机器人的“示教”过程就是焊接机器人的学习过程,大多数机器人是通过人工引导示教。焊接时,操作人员依据焊缝形状和位置,按照焊接顺序引导机器人焊枪运动,模拟焊接过程,焊接机器人记录运动轨迹上主要点的位置,从而达到记录运动轨迹,这个过程实际就是示教编程过程。这些点位置是否人工示教的准确决定了焊枪运动轨迹的准确性,也就是焊缝位置的准确性。排除焊接参数设置的影响,可以说,示教编程的精度,决定了焊接时焊缝的质量。
2 影响焊接示教编程的因素
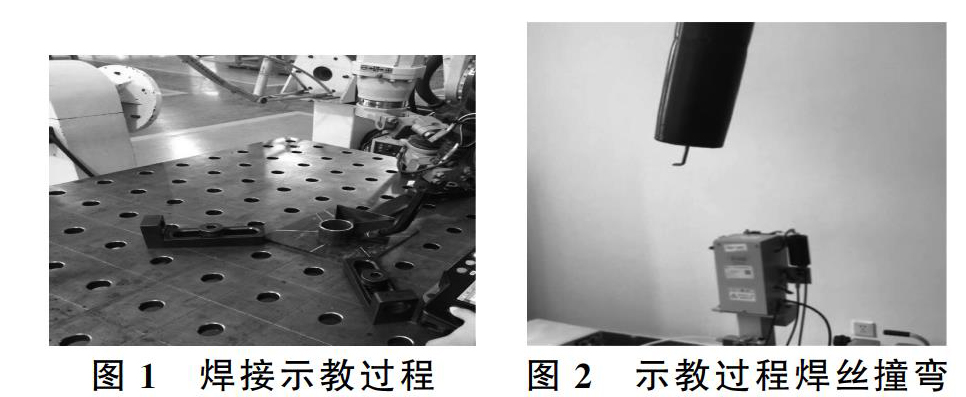
(1)采光不足的问题。如图1为焊接示教编程过程,在操作过程中我们发现在角焊缝位置示教时,明显的光线不足,操作人员很难在短时间找到准确点的位置。如果记录的点位置不准确,就会影响到焊缝的位置及焊接质量。
(2)焊丝伸出长度变化的问题。焊接示教时,焊接的几个轴不断地变换位置及角度,一会展开,一会回缩。在这个过程中,安装在机器人上臂的送丝软管就会不断地展开及回缩,在这个过程中就会造成焊枪口焊丝伸出长度的变化(一般保持在15mm)。而我们在示教时,一般以焊丝端头点来确定示教位置,如果这个点不准确,示教出来的位置就不准确,焊接的位置也就不准确,机器人焊接出来的焊接质量就不能保障。
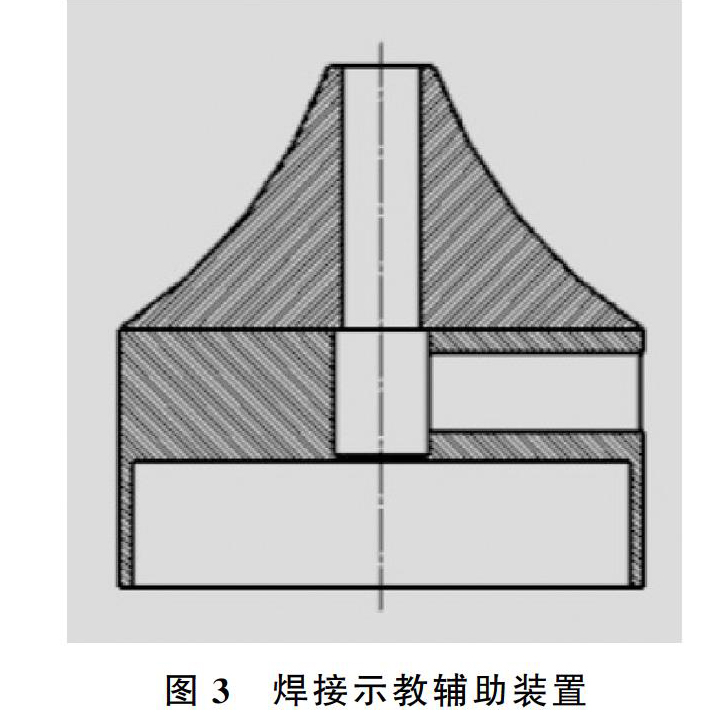
(3)焊丝易撞弯的问题。如图2所,焊接示教时,经常由于焊缝长度较长,示教点较多,示教时会造成焊丝撞弯曲的现象,从而造成示教点位置精度不够,影响焊接质量。
3 提高焊接机器人示教过程精度的办法
如图3为焊接机器人快速示教编程辅助装置示意图。把该辅助装置装在焊枪头部,安装以后该装置头部点的位置相當于以前焊丝伸出长度为15 mm时的位置。该位置点不论机器人臂如何变化也不会受影响。从而解决了焊丝伸出长度变化影响示教点精度的问题。
在该辅助装置中加装了照明用的强光灯,通过加强光灯来解决示教过程中光线不足的问题。
该辅助装置是由塑料制成,在头部装上接触传感器,在示教时通过传感器来判断是否接近示教点的位置,在接近示教点2 mm位置亮红灯;在接近示教点0.5 mm亮绿灯,这样很方便地判断示教点的位置。这样我们就很好地通过装置本身的材料和接触传感器很好地解决了在示教过程中碰撞问题。
参考文献
[1]傅积和.焊接数据资料手册[M].北京:机械工业出版社,1999.
[2]马淑秋.半自动CO2气体保护焊在生产中的应用研究[J].沈阳工程学院学报(自然科学版),2011,(01).
[3]霍晓敏,唐清山.二氧化碳气体保护焊在薄板焊接中的应用[J].四川建筑科学研究,2009,(06).
[4]柯鼎华.二氧化碳气体保护焊在供水管道上的应用[J].科技创新导报,2008,(13).
[5]刘会波.焊接机器人技术在160km/h快捷货车转向架中的应用[A].中国铁道学会车辆委员会快捷货车转向架技术交流会论文集[C].2015.
- 实验教学法在初中生物教学中的运用
- “类比”让初中生物不再晦涩
- 初中物理教学从“解题”到“解决问题”转变的探究
- 浅谈数学课堂教学中提问策略与技巧
- 初中数学“几何概念”的教学方式分析
- 思辨
- 思想政治课的“点睛”艺术
- 探讨声势律动在初中音乐教学中的运用
- 九年一贯制学校德育课程一体化建设的有效途径
- 九年一贯制学校推进德育一体化建设的有效方法
- 中小学德育课程一体化学段衔接的有效方法
- 情景式教学在初中语法教学中的应用
- 让学生在“动”中蜕变
- 分析初中英语课的情境教学
- 初中英语教学中“读写融合”的应用分析
- 浅谈初中英语阅读课探究式课堂教学活动设计
- 初中语文群文阅读教学法探微
- 初中语文教学中的多元化教学方法初探
- 基于核心素养的初中科学教学探讨
- 基于中学新课标视角下大学篮球专业课改革的建议
- 基于核心素养下的初中数学教学措施优化探讨
- 走进生活,贴近生活,联系生活
- 核心素养下初中历史情境教学探究
- 让中学历史教学闪烁人文的光环
- 基于思维品质的培养进行英语开放式阅读的探索和实践
- adagial
- adagio
- adagios
- adagy
- adamant
- adamantly
- adamants
- adam's apple
- adam's apples
- adapt
- adaptabilities
- adaptability
- adaptability, adaptableness
- adaptable
- adaptablenesses
- adaptably
- adaptation
- adaptational
- adaptationally
- adaptations
- adaptative
- adapted
- adaptedness
- adaptednesses
- adaptedness's
- 第二社会
- 第二章 吉祥植物的典故
- 第二章 四时节日风俗典故
- 第二章 弹奏乐器的典故
- 第二章 民间奇婚异俗典故
- 第二章 民间安灶的典故
- 第二章 民间寿辰风俗典故
- 第二章 民间手饰的典故
- 第二章 民间神道仙灵崇拜的典故
- 第二章 民间竞技的典故
- 第二章 民间葬礼忌戒风俗典故
- 第二章 民间饮食习俗典故
- 第二篇 民间婚姻风俗典故
- 第二粮食
- 第二罗马
- 第二者
- 第二职业
- 第二联合国
- 第二自然
- 第二话语信息量
- 第二语言教学法
- 第二课堂
- 第二财政
- 第二货币
- 第二资源