钟柏昌 王艳霞


摘要:机器人教育具有丰富的教育价值,但如何实现其丰富的教育价值还需要深入探索。越来越多的研究者关注合作学习模式在机器人教育中的应用。在与机器人教育密切相关的程序设计教育领域,两人配对学习编程(配对编程)已经有比较广泛和成熟的应用。将配对编程模式迁移于机器人教育是否具有可行性?课题组在无锡市某学校学生中开展了为期一个学期的教学实验。实验随机选择3个班级,分别以驾驶员一导航员模式(驾导配对模式),软件一硬件分配模式(软硬配对模式)以及独立学习三种不同的学习模式进行机器人课程的学习。实验结果表明,配对学习尤其是软硬配对学习模式在机器人教育中具有重要意义,可以促进学生制作更优秀的作品;但与独立学习相比,其在学习态度和学习沉浸度方面并没有显著差异。而直接从程序设计领域迁移而来的驾导配对学习模式并未产生预期的成绩,学习效果略差。机器人教育还需进一步研究影响配对学习效果的因素和改进办法。
关键词:机器人教育;合作学习;配对编程;配对学习
一、引言
以Arduino为代表的开源软硬件的流行,开启了中小学机器人教育的普及之路。近五年来,中小学开源机器人课程开始在全国各地兴起(钟柏昌等,2015)。机器人教育是多学科的整合体,涉及数学、物理、美术等学科知识。理论上,机器人教育具有丰富的教育价值,能够培养学生的实践创新等核心素养。但是,机器人教育价值的有效发挥,离不开有效教学模式、教学方法的保障。
目前,越来越多的研究者关注合作学习模式在机器人教育中的應用(Correll et al,2010;Chenget al,2013),有研究者提出项目学习法和竞争学习模式(钟柏昌,2016;李婷婷等,2017),其核心也涉及合作学习。就目前学界研究结果而言,合作学习模式相比独立学习确实具有较大优势,但也存在不可忽视的缺点,如角色固化问题,小组成员只做自己擅长的部分;又如“搭便车”或责任弥散问题,部分小组成员没有责任感,导致小组效率低下。我们注意到,在与机器人教育密切相关的程序设计教育领域,两人配对学习编程(即配对编程,PairProgramming)在国际上有比较广泛和成熟的应用。配对编程不再是两人自由合作,而是具有明显的角色分工,在任务完成过程中进行角色互换,以避免普通合作学习模式存在的角色固化和“搭便车”问题。
但是,设计和制作机器人的过程,除涉及编程控制外,还有工程设计、硬件搭建和外形包装等内容,那么,将配对编程模式迁移于机器人教育是否具有可行性?抑或有其特殊性?这些问题值得深入研究。
二、文献综述
1.机器人教育中的合作学习
在机器人教育中,合作学习相较于独立学习具有明显的优势:(1)合作学习可以显著增加学生的互动频率,引导学生积极学习并创造知识(Denis et al,2001;Wainer et al,2010);(2)合作学习可以提高学生对机器人教育的满意度及其在机器人操作中的自我效能感(Liu et al,2010);(3)合作学习有助于提高学生的学习绩效(Cheng et al,2013;Yuen et al,2014),以及学生在学习过程中的参与度(Correll et al,2010);(4)合作学习有助于学生更好地完成机器人搭建任务(Liu et al,2010)。
以上大多数的研究均采用了常规的合作学习模式,即每组由3~5名学生组成。只有少数研究者关注组员数量和角色分配对学生在机器人教育中学习绩效的影响。Bianeo(2014)指出,组内成员数量不超过3名是综合考虑学生及设备安全的一种最有效的3Y-~Jt方法。有研究者则表示4人一组学习也具有优势,其中一名学生操作控制机器人,一名学生观察指导,另外两名负责电脑端的程序设计(Mosley et al,2006)。同时,一些研究人员还提出,在合作学习中需要考虑角色分配和转换,以避免角色固化的问题(McGoldricket al,2004;Liu et al,2010;Yuen et al,2014)。然而,以上研究都只是提出了理论假设,并没有提供任何来自实证研究的证据。
2.配对编程相关研究
配对编程是指两个人使用一台计算机完成编程任务,一个是“驾驶员”(Driver),负责操作计算机编写代码;另一个通常被称为“导航员”(Navigator),负责观察“驾驶员”的工作,及时指出错误并提出问题解决建议(Williams&Kessler,2000)。配对编程最早用于软件公司的程序开发工作。研究表明,与独立编程相比,配对编程的编程者能够从更全面的角度进行思考,获得更好的程序设计思路,设计出具有更优结构和更高执行效率的算法和程序代码;同时,也能更早地发现程序问题,写出错误更少、质量更高的程序代码(cock—bum et al,2000)。Williams(2000)的研究表明,在不同的任务和人员条件下,配对编程能将代码错误率降低约15%。
随着配对编程思想的成熟及其在基础教育领域的渗透,配对编程成为了程序设计教育领域的一种合作学习模式。相关研究表明,配对编程可以显著提高学生的编程技能和编程质量(williarns&Kes-sler,2000;Cfiburn,2003;Hannay et al,2009);还能减少初学者的沮丧感,培养初学者对学习编程的积极态度(Bishop-Clark et al,2006;McD0well et al,2006);并进一步提高学生沟通交流和协作学习的能力(williams&Kessler,2000;Clibum,2003)。设计和制作机器人的过程,除涉及硬件搭建以外,还有大量的编程控制及工程设计等内容,因此,配对编程是机器人教育中值得借鉴与参考的一种模式。基于以上研究分析,理论上来说,引申自配对编程的配对学习模式也是机器人教育中具有可行性的一种教学模式。但与程序设计活动不同的是,机器人教育活动过程中存在人一计算机、人一机器人、计算机一机器人三种交互活动;此外,基于机器人教育的整合性,机器人课程不只有编程知识,还覆盖了包括力学、自动化、数学、计算机工程和人工智能等相关领域的知识体系(Femandez et al,2007;Ge-recke et al,2007)。因此,机器人教育中的配对学习与配对编程有一定的差异,配对学习的有效性尚需进一步研究和检验。
三、研究目标及研究问题
根据上述机器人教育的特点,我们将机器人教育中的配对学习模式分为以下两个类别:(1)直接模仿配对编程模式形成的驾驶员一导航员模式(以下简称驾导配对模式)。即一名学生扮演“驾驶员”,负责搭建机器人或为机器人编程;另一名扮演“导航员”,负责观察驾驶员的工作,及时指出错误并提出问题解决建议。任务完成过程中,配对双方需要进行两种角色的交换。(2)鉴于机器人教育的特点,增加了软件一硬件分配模式(以下簡称软硬配对模式)。即一名学生负责电脑端程序设计的软件操作,一名学生负责机器人搭建调整的硬件操作。任务完成过程中,配对双方同样需要进行角色交换。这两种配对学习模式的主要区别在于小组成员的角色分工不同,驾导配对模式将行为分离成操作和观察指导两种,而软硬配对模式则是根据操作对象的不同,将其划分为软件和硬件两种。
本研究的目标就是要进一步探索这两类配对学习模式在机器人教育中的教学效果。为便于比较研究,我们将独立学习作为参照。因此,本研究将分别比较驾导配对模式、软硬配对模式、独立学习模式三种学习模式的学生学习效果。学生学习效果的评价将主要通过学生的最终作品制作质量、学习机器人的态度和学习沉浸度来测量。由此,我们首先需要回答三个问题:第一,三种学习模式下学生作品制作质量是否有差异?第二,三种学习模式下学生学习机器人的态度是否有差异?第三,三种学习模式下学生的学习沉浸度是否有差异?
其次,本研究根据机器人教育的特点构建了软硬配对模式,与沿袭配对编程的驾导配对模式相比是否更加适合机器人教育?只通过上述问题还无法得到全面的答案,学生在完成项目过程中,其互动行为是否有差异,将是体现深度合作学习的一个重要方面。从配对学习的角度而言,同伴之间角色交换频率的差异可以作为一个衡量指标。因此,本研究除了关注两种配对学习模式在以上三方面的差异外,还将回答以下一个问题:在学习过程中,两种配对学习模式下学生的角色交换频率是否有差异?
四、研究设计
1.实验对象
为回答上述问题,我们在无锡市梁溪区某小学五年级学生中开展了为期一个学期(2017年秋季学期)的教学实验。我们从6个班级中随机选择了3个班级,共88名学生作为实验对象,样本人数分布见表1。根据初步调查,这些学生在2017年秋季学期开始学习机器人基础课程,之前没有学习过相关课程,不具备编程的基础知识和基本技能。为了进一步确保所有实验对象的知识储备处于同一水平,我们在实验开始前还进行了先备知识测试(前测),单因素方差分析结果显示,F(3,126)=1.709,p>0.05,说明3个班级在编程方面的基础知识和基本技能没有显著差异。
实验过程中,3个班级分别以不同的学习模式进行机器人课程的学习:
1班以软硬配对模式进行机器人课程的学习。在完成项目的过程中,两人合作,其中1人负责机器人硬件操作,1人负责电脑端软件操作,并根据自己需求进行角色交换,要求在完成每个项目的过程中至少交换一次角色。
2班以驾导配对模式进行机器人课程的学习。在完成项目的过程中,两人合作,其中1人负责搭建机器人以及为机器人编程,1人负责观察驾驶员的工作,及时指出错误并提出问题解决建议,根据自己需求进行角色交换,要求在完成每个项目的过程中至少交换一次角色。
3班以独立学习的模式进行机器人课程的学习,即一个人独立完成项目。
2.课时簧排
教学实验一共持续12周。其中前两周进行先备知识测试以及学生分组;第3~10周学习机器人课程知识,并完成4个项目;第11~12周进行任务考核,以及态度问卷调查和学习沉浸度问卷调查,任务考核和问卷填写要求每个学生独立完成。具体课时安排见表2。
3.实验材料
(1)mBlock机器人套件
本实验采用的是简单易搭建的mBot教育机器人。它是一款面向小学生,包含编程、电子和机器人知识的一体化教育机器人产品,图1展示了mBot基础版机器人小车。mBot小车可以通过配套的mBlock软件(基于Scratch 2.0)、mBot手机App以及mBlockly平板App来控制。在教学过程中,教师根据学校的硬件设备条件,选择利用积木式编程环境mBlock进行教学,图2是mBlock软件操作界面。
(2)配对学习手册
为了培养学生的配对学习习惯,并及时记录学生的配对学习行为,我们设计了配对学习手册,内容包括配对学习介绍、角色的分配准则、交换准则,以及配对学习角色交换记录表(见表3)。教师会在每节课上课之前将配对学习手册发放给每组学生,每节课结束后收回,要求学生认真填写角色交换记录表,教师在每次课后仔细检查手册。
五、研究方法及工具
为探索配对学习模式在小学机器人教育中的有效性,本研究设定教学干预措施——学习模式为自变量,作品制作质量、学习态度、学习沉浸度为因变量,分别经由作品制作测试、学习态度问卷调查、学习沉浸度问卷调查获得分数,如图3所示。
先备知识测试包含了7个选择题,其中前三题调查学生的经验背景,例如,一个问题是:“你以前参加过机器人竞赛吗?A.是,B.否”。后面四题则是编程常识和程序设计题目,数据分析结果显示,即使少部分学生有参加过机器人竞赛的经历,但编程基础和技能不存在显著差异,所有实验对象的编程基础和技能起点相似,这保证了实验的有效性。
学习态度问卷用来调查学生接受一学期的机器人课程学习之后对机器人搭建和机器人编程的自信心、享受度以及价值观上的认可度。问卷采用的是5点李克特量表,即答案范围从非常同意到非常不同意分为5个水平。学习态度问卷中自信心、享受度和价值观三维度问题的划分见表4,量表来源和信度详见表5。
学习沉浸度问卷旨在调查学生在课堂学习过程中的投入程度,为5点李克特量表。学习沉浸度主要体现在行为沉浸度、情绪沉浸度和认知沉浸度三方面。其中,行为沉浸度主要关注学生在课堂中的努力程度、注意力和任务参与度;情绪沉浸度则是调查学生的情感参与和认可程度,包括积极和消极的情绪;认知沉浸度是调查学生为解决学习难题使用的策略,认可掌握目标的学生更有可能使用深层次的策略。量表来源和信度详见表5。表6显示了学习沉浸度问卷中行为沉浸度、情绪沉浸度和认知沉浸度三维度上的具体问题。
作品制作测试是在机器人课程学习结束之后进行,每个学生独立完成,以评估学生的机器人搭建能力和编程能力。笔者和专业一线教师共同商议,并结合课程内容和学生知识掌握程度,设计了作品制作测试题(作品测试任务单):小车走一个完整的圆之后实现躲避障碍物;根据需要选择传感器,并正确组装在小车上。任务单中还指定了轮子转速,并提供了部分提示。最后根据学生提交的程序代码和小车的搭建质量,由专业教师打分,总分20分。
六、研究结果
1.作品制作成绩
第一个研究问题是探索三种学习模式下学生的作品制作质量是否有差异。为此,我们以学习模式为自变量,作品制作測试成绩为因变量,进行了单因素方差分析。数据显示三种学习模式下学生的作品制作质量没有明显差异,F(2,85)=0.10,p>0.05。但从三个班级成绩的平均分(见表7)中可以看出,使用软硬配对模式班级的平均分要略高于其他两个班级。
2.学习态度差并
为了调查三种学习模式下学生学习机器人的态度是否有差异,我们进行了多元方差分析。其中,三种学习模式为固定因子,学习态度的三个维度为因变量。多元方差分析结果显示,WilksA=0.847,p<0.05,表明学习模式对学生学习机器人课程的态度产生了显著不同的影响。
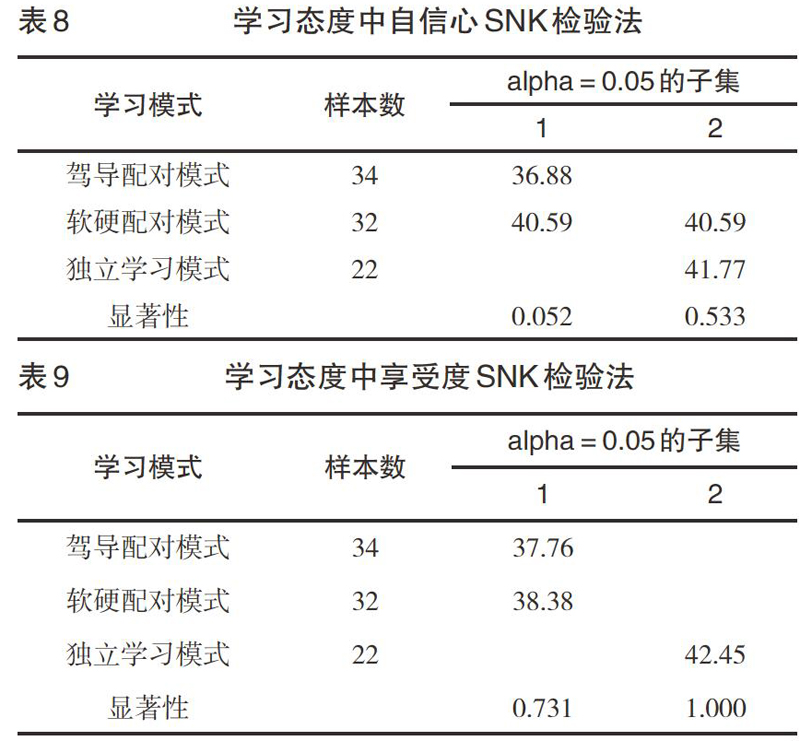
要找出具体差异,需对学习态度中的每个维度进行单因素方差分析。在自信心、享受度和价值观三方面,方差同质性检验的F值均不显著,p>0.05,可进行方差分析。单因素方差分析结果显示,不同学习模式下的学生在自信心和享受度上都存在显著差异,p<0.05,而在价值观上无显著差异,p>0.05。对存在显著差异的自信心和享受度两个维度分别采用SNK事后检验法进行两两比较,统计结果(见表8和表9)表明,独立学习模式下学生的自信心明显高于驾导配对模式下的学生,而软硬配对模式下的学生的自信心处于两者之间;独立学习模式下学生的享受度明显高于两种配对学习模式,两种配对模式下学生的享受度没有显著差异。
3.学习沉浸度差异
第三个研究问题是探究三种学习模式下学生的学习沉浸度是否存在差异。学习沉浸度分为三个维度,即行为、情绪和认知。我们首先进行了多元方差分析,将三种学习模式作为固定因子,学习沉浸度的三维度作为因变量。数据显示,WilksA=0.846,p<0.05,表明三种不同的学习模式对学生学习机器人课程的沉浸度产生了显著不同的影响。
在行为沉浸度方面,Levene检验结果为F=1.456,p>0.05,说明方差差异未达显著,可进行方差分析。单因素方差分析结果显示p<0.05,随后采用SNK事后检验法进行两两比较,统计结果(见表10)表明,独立学习模式和软硬配对模式下的学生行为沉浸度明显高于驾导配对模式下的学生,而独立学习模式和软硬配对模式下的学生行为沉浸度基本没有差异。在情绪和认知沉浸度方面,方差同质性检验结果p值分别是0.038和0.037,虽然违反方差同质性假定,但方差分析模型较为稳定,情况并不严重,不需要进行校正操作(吴明隆,2010)。对情绪和认知沉浸度分别进行单因素方差分析,统计结果表明,学生在情绪沉浸度上存在明显差异,p<0.05;SNK事后检验法的结果(见表11)表明,独立学习模式下的学生情绪沉浸度要显著高于驾导配对模式下的学生,而软硬配对模式处于两者之间。学生在认知沉浸度上并没有显著差异,p>0.05。这些统计结果与上述学习态度的统计结果基本一致。从学生的访谈中可以发现,学生虽然喜欢合作学习,但是也表示和搭档存在意见分歧的时候会觉得麻烦,这在一定程度上降低了他们在学习过程中的享受度和情绪沉浸度。
4.两种配对学习模式之间角色交换频率差异
第四个研究问题旨在探究两种配对学习模式中学生的角色交换频率是否存在差异。为此,我们计算了每次完成项目过程中的角色交换次数。如图4所示,两种配对学习模式下角色交换的频率变化趋势都是随着时间的增长而降低,没有显著差别。这一情况与课堂观察和学生访谈相符合。有学生表示:“一开始交换得很多,因为对这种角色分配比较感兴趣,而且总想自己来做;后来换得比较少,基本上只交换一次或者两次;而且如果不是教师强制要求交换,自己不想交换角色。”还有学生表示:一开始学习机器人课程比较兴奋,后来知道自己哪些会哪些不会,只有合作伙伴不会而自己会的时候才会主动提出交换。整体而言,学生的角色交换会随着合作时间的推移而变得更加默契和理性。
七、结果讨论
配对编程在程序设计学习上所产生的积极效果得到了大部分研究者的肯定,但是这一种新型的学习模式,目前只在程序教育领域应用,机器人教育领域还未有研究者尝试。本研究尝试将配对编程迁移到机器人教育中,并根据机器人教育活动的特点,构建了驾导配对模式和软硬配对模式。研究结果表明软硬配对模式下的学生具有一定优势,比驾导配对和独立学习模式下的学生表现更好一些,而直接从程序设计领域迁移而来的驾导配对学习模式效果略差。
在早期的研究中,研究者就发现团体在各种学习任务中的表现优于个人(Hill,1982)。机器人教育和程序设计教育中的众多研究也证实了这一观点(WilliaIns,Kessler&cunningham et al,2000;Denis et al,2001;Hannay et al,2009;Yuen et al,2014)。然而,这些研究关注的是团体学习表现与个人学习表现的差距,而不是每个学生之间的学习绩效差异。本研究对比了每个学生的学习成绩,尽管配对学习模式对学生成绩的影响并没有显著高于独立学习,但鉴于配对学习模式下的每个学生经历了配对合作的学习过程,有利于其合作精神的培养,且在每个学生独立完成的作品制作测试过程中也获得了不俗的表现(学生得分略高于独立学习模式)。从这个角度而言,配对学习模式具有较重要的教育价值。
在学习机器人的态度方面,驾导配对模式下学生的自信心明显低于独立学习模式和软硬配对模式,而独立学习模式和软硬配对模式中的学生在自信心方面没有显著差别;另外,三种学习模式中学生的情绪沉浸度的差异与学习态度中自信心的差异一致。这些结论与配对编程模式对初学者学习积极性的显著提升有所不同(Bishop-Clark et al,2006;McDowell et al,2006)。差异的产生可能与机器人教育活动自身特点有关。程序设计只存在两个交互对象,即学习者和计算机;而机器人教育活动存在学习者、机器人和计算机三个交互对象。完成课堂项目过程中的“驾驶员”需要负责机器人和计算机,需要较多的操作;“导航员”也需要同时观察机器人和计算机并指导两类问题。有学生在访谈中表示,自己一个人同时负责机器人和计算机会手忙脚乱,而导航员有时并不能起到指导作用。学生在课堂中不能从容有序地完成项目,情绪受到影响,而学生的情绪是影响其学习自信心的一个重要因素(Van Passel et al,2013)。
学习态度中的享受度也存在差异:独立学习模式下学生的享受度明显高于驾导配对模式和软硬配对模式。值得关注的是,学生的行为沉浸度的差异也极为相似:相比驾导配对模式,独立学习模式和软硬配对模式下的学生行为沉浸度更高。我们根据课堂观察和访谈,分析可能存在以下两个原因:首先,配对学习本质是合作学习,两人合作过程中无法避免意见分歧。有独立学习模式下的学生表示:“配对学习是比独立学习好,但是我更喜欢独立学习。因为两个人意见不一样时会很麻烦,自己一个人想怎么做就怎么做。”其次,机器人套件对小学生的吸引力是巨大的,独立学习的学生自己拥有一套器材,在学习过程中可以不断调试;而配对模式下的学生需要与搭档共享一套器材,分配调试机器人小车的时间,尤其是在学期前期阶段,合作成员之间默契程度不够,存在争夺调试机器人小车的问题。组内不和谐的合作环境同时也影响小学生的积极性与兴趣度,而兴趣与沉浸度呈正相关关系(Sun et al,2012)。
两种配对学习模式在角色交换频率上的逐步下降,表明配对学习模式确实有利于培养学生的合作精神和技巧,有利于培养学生养成合作解决问题的意识和能力。
整体而言,尽管本研究结论并没有“一边倒”地支持配对学习模式,但在一定程度上表明配对学习尤其是软硬配对模式具有较为重要的教育潜力,值得在今后的机器人教育研究与实践中做进一步探索,特别是需要找到更多影响配对学习效果的因素和改进的办法。例如,本研究中采用的是半自由交换,即学生在完成一个项目过程中根据需要自由交换角色,教师不固定交换次数和时间,但要求至少交换一次。此时会出现角色交换过度和过少两种极端。这就需要教师注意培养学生的理性的转换意识,引导学生在配对过程中真正根据需要进行角色转换。如果引导不到位,必然影响配对学习的效果。
- 提高排球起跳和移动能力的快速伸缩复合练习方法
- 小学体育室内课之桌凳总动员
- 巧用“声东击西”让枯燥练习更有趣
- 巧用网络微课程创编室内小游戏
- 无形育意识 有形增实力
- 校园足球课间操的开发与实践研究
- “问学课堂”中传接球渐进式合作的教研探究
- 良师益友伴成长
- 我为徒弟“洗课”
- “依托数据 深化主题”让体育校本教研真正发生
- “以课促研”构建体育校本教研常态研修模式
- 例析体育“借班上课”的有效策略
- 体育教学中三种展示与评价的应用实践
- 50米快速跑学练组织的策略研究
- 巧用满族特色“夹包”让课堂教学更有趣
- 对跨跳和跨跑的研究
- 高中体育课堂中的“课课练”内容设计及建议
- 改变教材处理方式提升学生学的内涵
- 中招体育考试项目成绩提升策略
- 探析常规体育课堂教学的几种小技巧
- 体育教学微课制作“五要”
- 从“有效起跳”视角谈立定跳远预摆技术与练习方法
- 水平一儿童舞蹈与游戏单元:儿童舞步教学设计
- 水平五啦啦操选项教学设计
- 水平一(二年级)健美操基本步伐教学设计
- chemistries
- chemistry
- chemists
- chemist's
- chemotherapeutic
- chemotherapies
- chemotherapist
- chemo-therapist
- chemotherapists
- chemotherapy
- cheque
- chequeaccount
- cheque acˌcount
- chequebook
- chequebooks
- cheque card
- chequecard
- cheque kiting
- chequekiting
- chequered
- chequerun
- cheque run
- cheques
- cherish
- cherishable
- 紧巴
- 紧巴巴
- 紧巴紧儿
- 紧庄稼,慢买卖
- 紧张
- 紧张剧烈
- 紧张地防备
- 紧张场面
- 紧张性/松驰性
- 紧张活动中的短暂休息
- 紧张激烈地搏斗
- 紧张疲困的情况得到缓和
- 紧张的情势
- 紧张的样子
- 紧忙
- 紧急
- 紧急、和缓
- 紧急军事文告
- 紧急军情的报告
- 紧急匆忙的样子
- 紧急征召
- 紧急抢救
- 紧急救治
- 紧急救济
- 紧急时高速度、长时间的连续行军