刘岩松 郑欣 王金涛 龙岩

摘要:为满足不同业务需求,保障业务实时性与稳定性,针对多种业务不同的链路连通性,提出适合不同业务的链路选择方法。基于航空自组网近似模型,首先提出一种节点到基站的连通概率算法,其次根据飞机非匀速运动特点,运用Gauss-Markov移动模型,求出航空自组网连通时间,同时建立相应场景并进行仿真。结果表明,不同业务可根据程序计算结果选择所需链路。
关键词:链路;航空自组网;连通概率;连通时间
DOI:10.11907/rjdk.192222 开放科学(资源服务)标识码(OSID):
中图分类号:TP393文献标识码:A 文章编号:1672-7800(2020)006-0240-04
0 引言
航空自组网(AeronauticalAd Hoc Networks,AANET)的出現推进了民航通信系统发展,它既可提供空中紧急救援、航行管理,还可提供机上娱乐、语音通信、因特网接人等服务。航空紧急救援是目前最有效的应急救援。德国空中救援组织要求空中紧急救援响应时间在8min之内,在过去的30年里,该组织已完成十万多次空中急救任务,有近90万人获得急救,其中10多万人因得到空中快速抢救得以生还,不过仍有近万人因空中救援响应不及时而丧生。选择较高连通概率链路可缩小救援响应时间,从而提高飞行活动安全性和可靠性。除了航空紧急救援,机舱内娱乐业务和语音通信等服务也依赖于飞机链路稳定性,自2013年来,中国国际航空实现运行第二代机上无线网络系统,该系统拥有5个高性能处理器,存储容量达到1T,每个AP可为50-70位旅客提供更丰富的娱乐内容。但机上娱乐等高带宽业务需消耗少则几十兆多则上千兆流量,航空白组网连通时间较长。所以不同业务选择合适的链路尤为重要。
许多学者围绕航空自组网连通性进行了研究。文献[5]提出一种甚高频航空自组网的解决方案,解决了飞行器之间不能直接通信、难以接人Internet等问题;文献[6]提出一维航线连通概率公式以解决固定航线航空自组网连通性问题;文献[7]提出交叉航线连通问题解决方法。但现有研究均存在理论与实际结合不紧密、研究场景只针对一维航线场景、节点没有固定的运动轨迹等问题。
针对以上问题,本文首先建立航空自组网空中航线模型与空地航线模型,提出节点到基站连通概率计算方法;然后结合飞机非匀速运动的特点,基于Gauss-Markov移动模型,求出航空自组网连通时间,结合不同业务需求,建立相应场景进行仿真实验。结果表明,不同业务可选择合适的链路,保证相关业务稳定地完成。
1 模型建立
假设两架飞机之间通讯半径为R,即飞机节点之间必须小于或等于R才可连通,飞机数量服从泊松分布。
(1)模型1(空中航线模型)。空中航线模型大多采用双向航线模型,如图1所示。航线高度根据飞机飞行方向分成奇偶高度层,相邻两层的飞机飞行方向相反,且飞机之间相互独立。
(2)模型2(空地航线模型)。空地航线模型表示为飞机与地面基站的通信模型,如图2所示。图中场景共有3条航线分别为A、B和C。地面有4个通讯基站,分别为a、b、c、d。飞机经过多跳直接或间接接人地基站,例如航线A上的飞机通过节点1跳到航线C,再通过节点1通信范围内航线上的节点,最终接人地面基站d。
2 连通概率计算
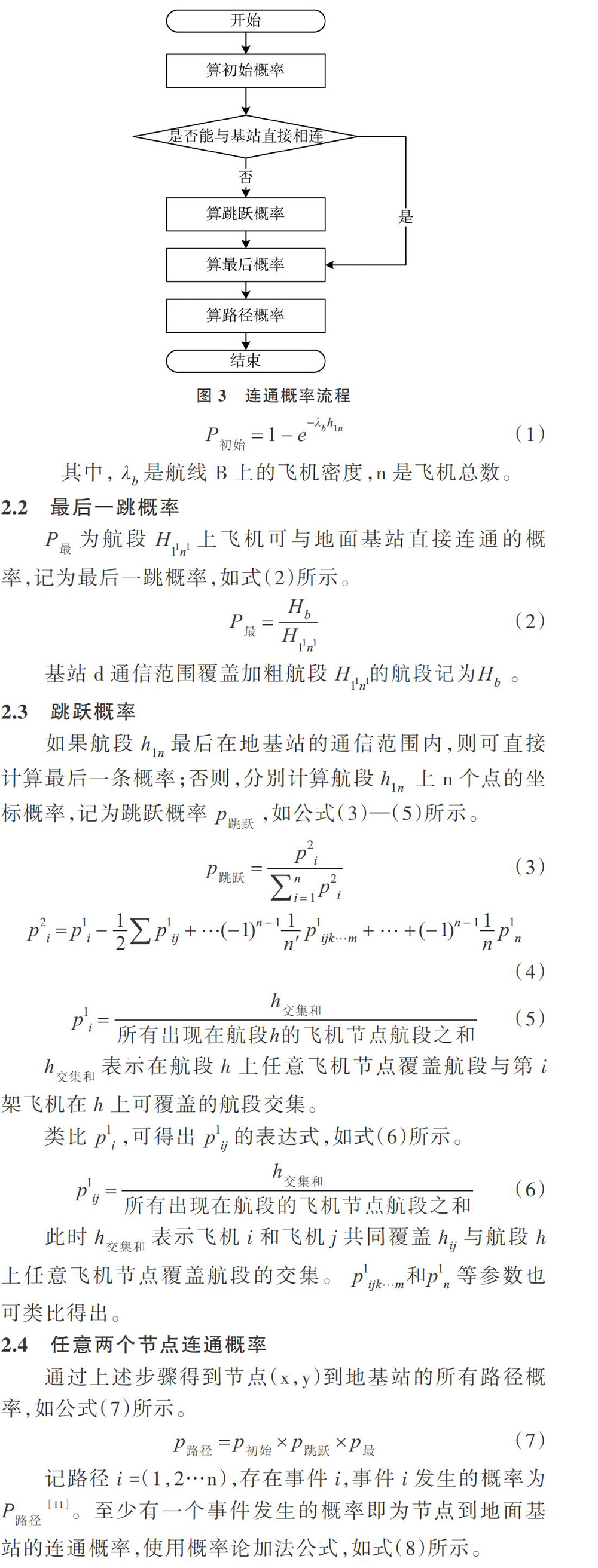
基于航空自组网模型,计算节点到地面基站的连通概率,具体计算流程如图3所示。本部分以图2为例,详细说明连通概率具体算法。
2.1 初始概率
航线A上的飞机节点跳到其通信范围内的航段H1n上等同于其通讯范围内至少有一架飞机的概率,而任意一条航线飞机数量服从泊松分布,以坐标为(x,Y)的飞机节点为开始节点,计算其跳到通信范围内航段H1n的概率,记为P初始,如式(1)所示。
其中,λb是航线B上的飞机密度,n是飞机总数。
2.2最后一跳概率
2.3 跳跃概率
如果航段h1n.最后在地基站的通信范围内,则可直接计算最后一条概率;否则,分别计算航段h1n。上n个点的坐标概率,记为跳跃概率P跳跃,如公式(3)-(5)所示。
2.4 任意两个节点连通概率
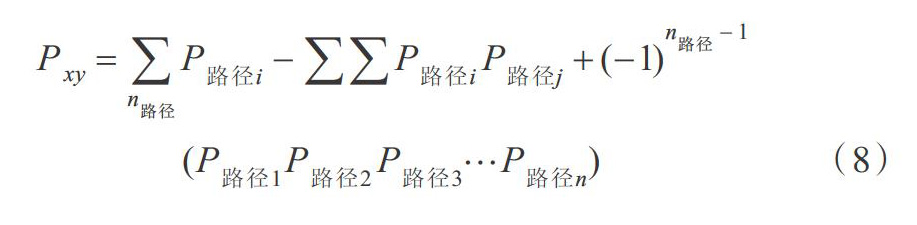
通过上述步骤得到节点(x,y)到地基站的所有路径概率,如公式(7)所示。
记路径i=(1,2…n),存在事件i,事件i发生的概率为P路径。至少有一个事件发生的概率即为节点到地面基站的连通概率,使用概率论加法公式,如式(8)所示。
3 连通时间计算
3.1 链路连通时间
在航空自组网中,群组移动是随机的,且会影响前后节点速度。Gauss-Markov模型相比于其它群组,移动模型具有前后运动相关性,每隔一段时间即根据当前速度改变一次,第n次运动由第n-1次运动速度值和一个随机变量决定,如式(9)所示。
其中,vn表示节点在第n个步骤的速度值,a表示趋近于无穷大时的平均值vn-1,其符合高斯分布随机变量∝ ∈[0,1],用来调节运动随机性,根据相应的速度公式可以求出连通时间。假设其中一个节点速度为v1,另一个速度值为v2,两个节点距离为D,因为只有当飞机之间的距离小于通信距离才会实现全联通,假设两个飞机之间的通信距离为R,则有限制条件D
当两个飞机位于单条航线上,两个飞机方向相同,距离为:
3.2 信息所需连通时间
信息大小约为C,链路传递速率为s1,根据公式(14)可求得信息所需连通时间。
链路连通时间与信息连通时间不同,通常链路连通时间大于信息所需时间,才可顺利传输信息。
4 仿真环境
以航空白组网的空中航线模型和空地航线模型为背景,结合不同业务需求,在MATLAB平台上构建仿真场景。仿真包括两组实验:场景l以空地航线模型为背景,模拟飞机出现故障的紧急情况;场景2以空中航线为背景,模拟鄰近飞机信息传递情况。
4.1 仿真场景1
假设一架A320飞机有一名因消化道大出血导致失血性休克的患者,机组人员急需与地面基站取得联系,此时飞行场景大小为1000km x 1000km,航线数目为6,飞机通信半径300km,航线长度800km,飞机间安全距离40km,基站坐标(450kin,250km)。航线参数信息如表1所示。
使用本文提出的多航线航空自组网连通概率计算方法,得出该场景下最大概率链路,如图4所示。
如图4所示,以黑色三角为飞机起始点,根据泊松分布计算第一跳概率,以此为圆心,通信范围为半径,得到与周围航线相交的离散点。分别计算这些离散点转移概率,其中点5连通概率最大,以此作为下一跳,最后直接接人地面基站,该路径为最大概率链路。各链路概率值如表2所示。
根据概率值得出不同链路连通概率与时间的关系,如图5所示。其中横坐标为连通时间,单位为s,纵坐标为连通概率。
由图5可以看出,A320发生紧急情况时,为实现快速与地面取得联系,应在周围5条可连通的链路中,选择最大概率的链路。
4.2 场景2
假设飞机1上乘客A正在通过航空自组网给另一架飞机5上的乘客B传送视频。视频大小约50M,飞行场景大小为600km x 800km,航线数目3,飞机相互之间距离均在通讯半径内。分别根据表3的飞机参数和表4的链路参数,求出链路连通时间和信息连通时间,再进行对比,如表5所示。
通过表5可知,这3个链路中飞机链路1-2-5和飞机链路1-3-5的带宽较大且连通时间大于信息传递时间,可以实现信息传递。其中飞机链路1-2-5本身连通时间较长,稳定性更强,所以选择飞机链路1-2-5。
综合以上分析可得出该场景下飞机最长连通时间路径,如图6所示。
飞机l向飞机5传送视频时,因流量较大,需较长的连通时间链路,在周围3条链路中,应选择链路1-2-5。
5 结语
本文针对不同业务有不同链路连通性的需求,结合航空自组网空地模型和空中航线模型,提出了节点到基站连通概率算法,并应用Gauss-Markov移动模型,求出航空自组网飞机节点间的连通时间。不同业务根据计算结果选择对应链路可保证业务高效稳定地完成。本文对于业务类型涉猎有限,因此下一步将使航空白组网与更多类型业务结合,为航空白组网连通性研究提供重要参考。
- 长尾理论对高职思想政治理论课个性化学习的启示
- 教育不是灌满一桶水,而是点燃一把火
- 浅析民族院校“00后”预科学生的管理对策
- 浅议高校学院办公室工作的创新与发展
- 浅析高等学校学籍管理成绩单的发展历程
- 基于互联网思维的高校教学管理新模式探索
- 柔性管理在高校辅导员管理中的运用探讨
- 新形势下独立学院学生党员发展和管理工作研究
- 将思政教育融入高校学生事务管理中的措施
- 微课结合CBL及OSCE模式在内分泌科临床轮转教学中的应用
- 基于微信平台培训,结合学生互评法在护理实习生心肺复苏培训中的应用
- 泌尿外科临床见习中应用多媒体技术联合CBL教学模式的效果
- 基于UMU平台在心肺复苏技能培训中的应用
- 关于临床带教中的几点建议
- “三段双元一中心”实训课教学模式的应用研究
- 规培医生为主讲的小讲课在规培教育中的应用
- 电工电子技术教学改革的探索与实践
- 基于OBE理念的计算机组成原理混合式教学实践
- 大数据时代下基于SPOC的大学英语任务型教学模式实践改革
- 中职美术必修模块教学举措的创新
- 产业背景下车辆工程专业的建设与思考
- 高校学生思想政治教育与日常事务管理工作的相关思考
- 项目化教学在矿井通风学课程中的应用研究
- ARCS动机理论在案例教学中的运用
- 学案导学法在高职数学教学中的应用研究
- refight
- refighting
- refights
- refigure
- refigured
- refigures
- refiguring
- refile
- refiled
- refiles
- refiling
- refill
- refillable
- refillables
- refilled
- refilling
- refillings
- refills
- refill²
- refill¹
- refilm
- refilmed
- refilming
- refilms
- refilter
- 相能
- 相臣
- 相與
- 相舍
- 相若
- 相蒙
- 相薄
- 相蜂
- 相衔
- 相要
- 相见
- 相见以诚
- 相见以诚,请恕不谦
- 相见何晚
- 相见好,同住难
- 相见恨晚
- 相见恨晚,仰首长叹
- 相见无日
- 相见无缘,徒自深想
- 相见时难别亦难,东风无力百花残
- 相见易得好,共住难为人
- 相见欢
- 相见的时间短
- 相见非常难
- 相观