
摘 要: 传统的频率测量方法不足之处较多,即使用单一测频法在频率的上下限处测量的误差较大。在此设计了一种新型测频法及其测量电路。即利用声表面波带通滤波器对被测频率进行预选,高于中界频率的信号用测频法,低于中界频率的信号用侧周法,试验结果表明新型测频法的硬件电路在辅以高速数字器件后,系统测量精度比传统测频法有相对提高,具有在各个行业推广应用的价值。
关键词: 频率测量; 声表面波; 传感器; 中界频率
中图分类号: TN911?34; TP212.9 文献标识码: A 文章编号: 1004?373X(2015)08?0136?03
Study on a new method of frequency measurement based on SAW sensor
MA Hui?cheng
(Science and Technology Department, Xian Innovation College, Yanan University, Xian 710100, China)
Abstract: The shortcomings of the traditional frequency measuring methods are discussed in this paper. A new method of frequency measurement based on SAW sensor and a measuring circuit are designed. The frequency is preselected by SAW band?pass filter. The signal which is higher than intermediate frequency is measured by the method of frequency measurement and period measurement for others. The hardware circuit is composed of high speed digital devices. The system has high accuracy and is worth to spread.
Keywords: frequency measurement; SAW; sensor; intermediate frequency
传统的频率测量是利用频率计数电路[1],在规定的时间内对频率信号进行计数,这个规定的时间就是闸门时间,闸门时间是由双稳态电路提供的。测得的频率数值[fx],是在闸门时间[Tg]内对脉冲的计数值[Nx]与闸门时间[Tg]的比值,即[fx=NxTg]。当频率计正常运转时,被计数的信号脉冲首先通过闸门然后输入计数器,一般状况下,闸门的打开与闭合与计数脉冲在端口输入的时间是不同的。因此在相同的闸门时间里,频率计数器对相同的脉冲信号计数时,最终的显示值是不一样的,即有可能产生[±1]个脉冲误差值[2]。[Nx]会产生误差,[Tg]也会产生误差,这些误差的叠加就构成了实际的测频误差。利用晶振来产生基准时间信号[Tg],方法是晶振的输出信号[fb]通过[n]级10分频电路,即[Tg=10n×1fb]。所以,[fx=Nx/Tg=Nx×][fb10n]。最终测频法的相对误差[dfxfx]为:
[dfxfx=dNxNx+dfbfb] (1)
[δf=δN+δ0] (2)
式中:[δN=dNxNx=±1Nx]是示值的相对误差,也叫量化误差;[δf=dfxfx]是被测频率信号的相对误差;[δ0=df0f0]是晶体振荡器的频率准确度,可以用来表示频率信号的稳定程度。
由式(2)可得,,被测频率的相对误差由两方面内容构成。即系统石英晶体振荡器的频率稳定度和量化误差组成。量化误差与两个因素相关:被测信号的频率值得上下限和双稳态电路的输出闸门时间。在某一频率[fx]的值不变的情况下,闸门时间[Tg]越大,误差值越小,闸门时间[Tg]越短,误差值越大。如果取闸门时间[Tg]为某一定值时,测量值[fx]越大,误差越小,测量值[fx]越小,误差就越大。在检测过程中就会出现频率值较低的信号测量精度较低,频率值较高的信号测量值较高的情况。系统的测频结果与频率信号的高低有直接关系。为了避免出现以上的情况,本文设计了一种利用表面声波器件的新式测频法。
1 新型测频法原理
外界的物理量可以影响声表面波(Surface Acoustic Wave,SAW)[3]传感器输出频率的数值。表面声波传感器的固有频率达到了百兆Hz量级,这个频率太高,因此很难被频率计精准测量,只有通过成比例的降低频率才能精准测量。本文的被测量是表面声波传感器在进行了差动结构的改进之后输出的频率。这个频率在经过混频电路之后就处于0~1 MHz之间。这个频率范围是可以精准测量的。为了在频率的两端都有较高的测量精度和较低的测量误差,本文设计了利用表面声波带通滤波器的新式频率测量方法。带通滤波器对于通过的信号有较强的选择能力,只有信号的频率在通频带内的信号才能无失真的通过。在此可以按照频率的高低来设计两个声表面带通滤波器,设计方式主要是在插指换能器的密度上按事先计算的结果来排成不同的密度,声波在谐振腔内的振动频率由于换能器的密度不同而不同。这样最终输出的频率就根据插指的密度不同而不同,整个系统只要2个带通滤波器就可以了。将来如果想要实现精度更高的系统,可以考虑多个带通滤波器的情况,这样带通滤波器的设计难度会增加。
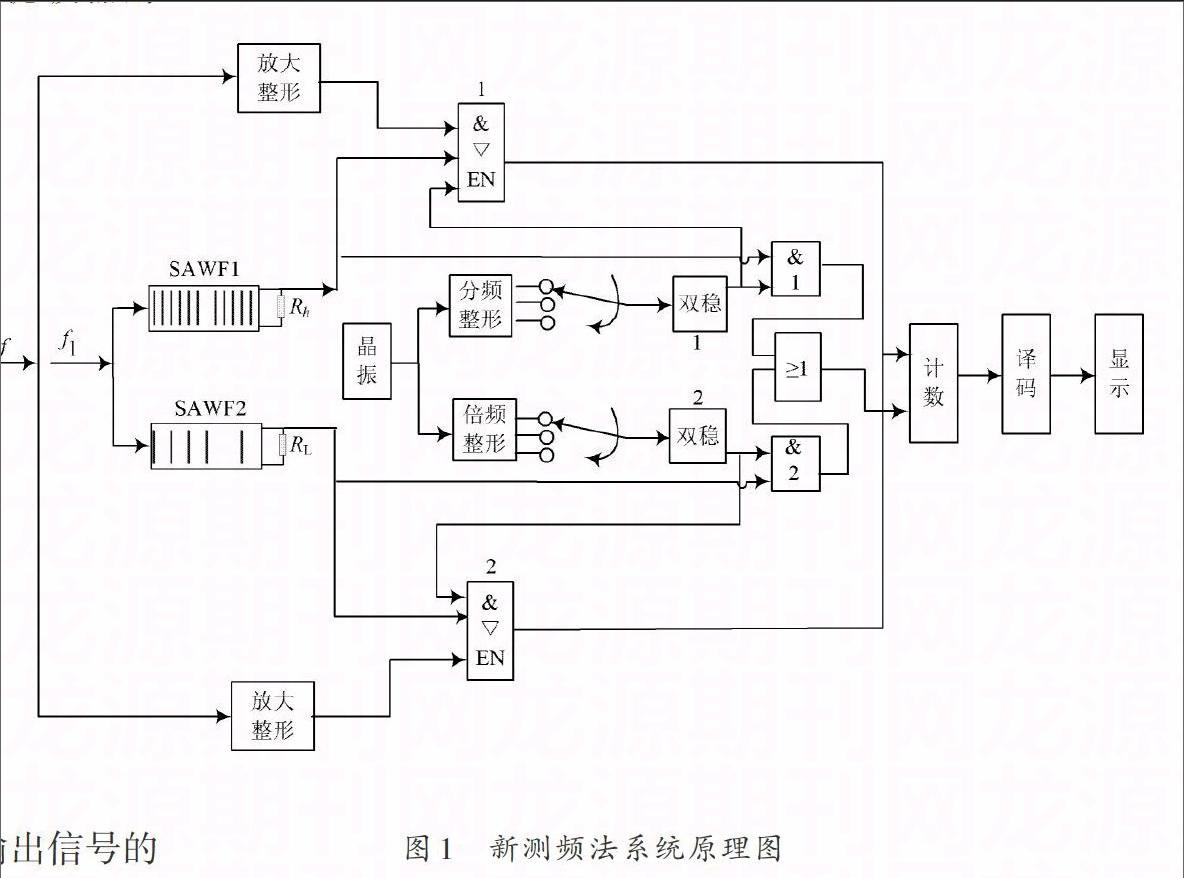
频率信号的测量方式有两类,高频段可以测频以及低频段可以测周期。至于何时测频以及何时测周期则要看测量仪器的中界频率[2][f0]。高于中界频率的频率应该选用测频法,低于中界频率的频率应该选用测周期的方法。其中,中界频率[f0=fcT];[fc]为测周期时仪器计数脉冲的频率;[T]为直接测量频率时规定的闸门开启时间。利用两个带宽分别是[f0,fmax]和[fmin,f0]的声表面波带通滤波器[SAWF1]与[SAWF2]就可以判断频率信号的数值[4],实现原理如图1所示。其中,[fmax]与[fmin]分别是表面声波传感器里的敏感元件[SAWR1]输出信号的频率[f1]的上限值与下限值。[f1]信号是前端传感器悬臂梁上表面敏感元件的输出信号。因为[f1]频率较高,直接对信号[f1]测量误差较大,于是选择传感器[SAWR1]与[SAWR2]输出信号的差频结果[Δf]进行测量,通过对[Δf]的测量可以知道外界加速度的具体数值,通过对[SAWR1]输出的信号[f1]的测量,通过测量值可以判断频率的高低并确定适合的测频法。
由图1可见,带通滤波器[SAWF1]可以让高于中界频率的频率信号通过[5],而[SAWF2]可以让低于中界频率的频率信号通过。当[f1>f0]时,[SAWF1]输出高电平并同时触发三态与门1。被测信号[Δf]经过放大整形后变成了一系列的窄脉冲并输入到三态与门1。晶体振荡器输出的正弦信号(频率为[fc],周期为[Tc]),经k次分频、整形后得到周期为[T1=kTc]的窄脉冲,以此脉冲触发双稳态电路1,从双稳态电路的输出端即得到所需要的宽度为基准时间[T1]的脉冲信号即闸门时间脉冲,该信号一路输入到三态与门1,一路输入到与门1。在三态与门1导通期间[6],被测频率[Δf]与闸门时间[T1]为与的关系,即[Δf]只有在[T1]时间内能通过三态与门1,并输入到计数器计数。双稳态电路的输出信号一路输入到了与门1,与门1的另一个输入信号是SAWF1的输出信号[f1],当[f1>f0]时,[f1]、[T1]为与的关系,与门1输出高电平信号并触发计数器开始工作,计数器在[T1]时间内对[Δf]进行计数,假设计数值为[N1],则[Δf=N1T1]。根据[Δf]的值可以推算出外界加速度的大小。同理,当[f1
被测信号的频率介于0~1 MHz,相对数字电路器件来说信号的频率稍高。电路各个元器件都有传输延迟的现象,高频信号在测量中就会产生一些误差,这些误差体现在计数环节,译码环节及数码显示环节上。利用D触发器具有分频的特性,在正式测量前对信号进行降频,这样可以得到一个频率相对较低的信号。这样的信号在后续的测量过程中不会带有太大的误差。
图2是后续电路,包括显示、分频和计数3个环节。频率降低的原理是通过D触发器对输入被测信号首先进行两分频,这样可以得到输入信号频率一半的被测信号。电路的结构是把D触发器的端口[Q]与D触发器的置位端口D直接连接从而构成两分频电路。触发器输出端的输出信号再送到10进制计数器74LS192D的UP端口,这个信号的频率很高达到了1 MHz,所以必须用6个数码管来显示被测结果。低位计数器的C0端口和高一位的UP端口连接,这样就可以显示6位10进制数字。电路图里J1的功能是对数码管进行清零操作,以保证测量开始时数码管都显示0。整体电路如图2所示。3 试验结果及精度分析
利用Multisim 10软件对测频电路进行分析。分析过程为选取1 MHz的标准信号,首先进行2分频,整体电路里的频率计XFC1对上述信号进行测量,显示示值为500 kHz。使用软件自带的示波器对两路信号进行观测, 由图3、图4可得2分频后的信号频率约为被测信号频率的一半。测试数据证明所设计的两分频电路满足测量的要求。从表1可以看出,系统在测量时在低频段的误差几乎为0,只有在高频段才出现了误差。信号源输出的频率为500 kHz时,系统的测量频率为499 kHz,绝对误差是1 Hz。信号源输出的频率为1 000 kHz时,系统的测量频率为997 kHz,绝对误差是3 Hz。
4 结 语
频率的测量在科学研究工业生产的各个方面都具有很重要的作用,能否得到一个准确的频率值往往决定了一个检测系统的优劣。例如:现代很多传感器输出的信号具有准数字化特征,这个特征就是信号不用进行模/数转换就可以直接输入测量系统进行测量,电路的结构得以简化,但是这个频率信号的测量误差是个难以解决的问题,传统的测频法无法解决在频率的上、下限处测量时产生的较大误差。本文提出的基于频率选择的测频法在误差控制上得到了提高,但是还有一些问题尚需解决,例如下一步可以考虑测量理论的具体实现。利用智能系统实现新型频率测量方法,首先要考虑选用哪种芯片,在电路中还要选取具体的双稳态电路和相应的触发器。电路中的滤波与放大电路也要设计合理,只有所有的因素满足系统的需要,整个系统才能体现出设计目标。
表1 试验数据
参考文献
[1] 马惠铖,刘骏跃.SAW加速度传感器差动结构的改进[J].制造业自动化,2010(2):184?185.
[2] 刘骏跃.声表面波惯性器件传感检测研究[D].西安:西北工业大学,2007.
[3] 陈明,范东远,李岁劳.声表面波传感器[M].西安:西北工业大学出版社,1997.
[4] 刘骏跃,陈明.悬臂梁式SAW加速度传感器的信号特征及测量方案[J].传感技术学报,2005(4):733?735.
[5] 李志宏,杨振川,武国英.微机械惯性传感器[J].电子科技导报,1999(8):19?24.
[6] 顾英.惯导加速度计技术综述[J].控制与制导,2001(6):78?84.
- 基层公共图书馆深入推广少儿阅读策略研究
- 基层馆(室)档案专业技术人员素质结构分析
- 浅议基层检察机关档案管理工作
- 浅论家谱收藏利用与公共图书馆特色文献馆藏建设
- 关于新时期人事档案的收集归档工作研究
- 关于大数据环境中企业文书档案的信息化探讨
- 公共文化服务标准中的公共图书馆发展之研究
- 港航业档案管理评价指标体系的思考
- 如何做好水利科技档案的归档和验收工作
- 加强新时期下医院档案工作的几点浅谈
- 关于新发传染病档案建设的管理与思考
- 浅谈档案工作的重要意义
- 电子商务档案管理的实践探讨
- 新形势下如何做好文书档案管理工作
- 医院医疗设备档案的管理与归档
- 大数据时代公共图书馆的发展与管理
- 基层事业单位档案管理现代化实现路径
- 新时代下城乡居民基本养老保险档案管理存在问题及其对策研究
- 试论城建档案与城市文化
- 纸质图书与电子图书在未来图书管理中的地位分析
- 实现档案科学化管理分析
- 图书馆阅读推广价值观策略的思考
- 新时期中学档案管理信息化建设的思路探究
- 我国目前图书档案管理现状及改进建议
- 基于新形势下医院档案管理现代化的问题及相应对策
- resocializations
- resocialized
- resocializes
- resocializing
- resod
- resodded
- resodding
- resods
- resoften
- resoftened
- resoftening
- resoftens
- resold
- resolder
- resoldered
- resoldering
- resolders
- resoled
- resolicit
- resolicited
- resoliciting
- resolicits
- resolidification
- resolidifications
- resolidified
- 巴洛克艺术
- 巴渝舞
- 巴火
- 巴狗子看门——冒充大狗
- 巴甫洛夫
- 巴甫洛娃
- 巴稳
- 巴站
- 巴童
- 巴篓子
- 巴结
- 巴结上司
- 巴结到家反被害
- 巴结攀附有钱势的人
- 巴结有权势的人
- 巴结猴儿
- 巴结讨好
- 巴结,奉承
- 巴统
- 巴而思
- 巴腮子
- 巴臂
- 巴苴
- 巴菲特税
- 巴蛇