赵志宏 车军 王彩芸


摘要:在“中国制造2025”战略背景下,制造车间为了将物料运输效率进一步提高,需要将AGV作为车间产业智能化、自动化升级的重要工具。对于这种无人驾驶的自动导引小车来说,提高其导航精度是其能应用于现场环境的关键,也是其能够安全工作的重要保证。为了改进传统PID算法在路径追踪偏差修正中表现出的鲁棒性差、对环境变化比较敏感等问题,一种参数自整定模糊PID控制被用作运动控制算法,在小车运动过程中,实时修改其PID参数,使系统的响应速度更快,控制效果更优。通过试验表明,自整定模糊PID控制系统在运动控制系统中的动态响应,调节速度,超调量等表现皆优于传统PID控制。
关键词:自动导引小车;导航定位;路径跟踪;模糊控制
中图分类号:TP273文献标志码:A
0引言
在“中国制造2025”战略和制造强国战略背景下,智能制造工程作为战略五大工程之一,建设智能化车间是其主要目的。而AGv(自动引导小车,Automat—ed Guided vehiele的简称),代替人工来执行车间中的物料运输的功能,是提高效率,建设智能化工厂的趋势。这种AGv小车通过装备导引装置,使得车体沿规定的导引路径行驶,并同时完成物料运输,安全保护等功能。
AGV的导引方式有多种导引方式,典型的譬如电磁导引、激光导引等。在某制造车间工作环境中,采用激光导引得移动小车,相比其他导引方式小车,具有定位准确,路径更为灵活的优点。因此研究激光AGv的导引技术具有很强的实用性。本论述将针对国内某机车转向架生产制造车间为响应战略,打造现代化智能物流系统而使用的激光叉车AGV进行研究,重点对其轨迹跟踪技术进行探究。
1激光导引叉车系统的结构及参数
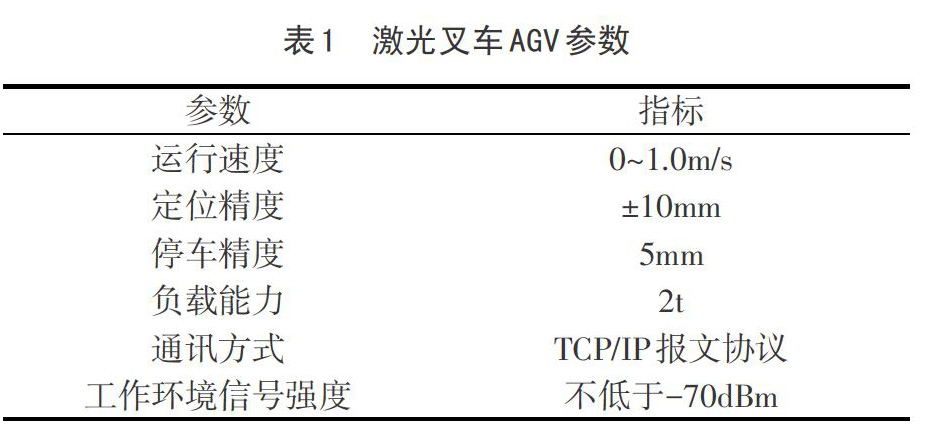
在制造车间,AGv负责将自动立体库及缓存区的物料自动配送至车间各个工位及车间内各产线的物料转运。叉车型激光AGv如图1所示。叉车采用三轮结构,主驱动轮采用中230×90mm的轮子置于前面中心部分,两个定向随动轮(2-φ85×60mm)置于车体的后端左右两侧,附加安装于车底两个起支撑作用φ150×50mm的平衡轮(万向轮)。叉车结构设计在满载的情况下,重心向一侧偏移不能超过120—150mm;对于不满载的情况,重心向一侧偏移不能超过250mm。AGV的部分参数见表1所列。
叉车系统由无线通信模块、人机交互模块、传感器检测模块、控制模块、导航定位模块等组成,AGV系统结构图如图2所示。
2叉车导航系统
AGV小车采用带反光板的激光导航技术。小车在工作环境中运行时,安装在车体顶部的激光扫描雷达高速旋转并发射激光束,并通过接受在运行环境中预先布置好的反光板的反射光经控制器的计算就能确定小车当前的位置和姿态信息。但前提是激光扫描系统至少要扫描到三块反光板,所以必须确保激光扫描器在小车工作路径的任何一个位置可以扫描到三个或以上的反光板。考虑到AGV工作环境比较宽阔,则采用50mmX70mm的平面覆膜激光反射板,根据现场的实际情况来确定使用数量。在反光板的安装中应当注意:完全对称于工作路径两侧的安装方式要避免;反光板附着的一些材质如窗户玻璃因其易反光性会对激光雷达的接收造成一定程度的干扰,需在其两侧放置反光板;反光板一般需安装正面45°或90°;在精度要求比较高的地点(如装卸货物的站点)要多安装几个反光板。
3激光定位算法
本论述定位算法的原理是控制器通过计算所匹配到的反光板与小车的夹角得出小车位置点和方位。在这个算法中,激光导航完全可以满足其角度分辨率高和波束极窄的硬性条件要求。小车的工作环境绝对坐标系应设在路径规划区域第一象限以方便计算。地图环境坐标点的添加采用手动模式,具体方法如下:先用CAD做出厂区环境的平面图,提前测量每一块反光板的位置坐标数据,并导出这些数据以建立工作环境的绝对坐标。激光定位的原理图如图3所示。
通过公式(2)求解超定方程组(扫描到的反光板数量要求大于3),就可以得到局部坐标系平移和旋转变换参数COSθ,sinθ,△X,△Y,进而得到AGV的位姿。所以可以通过反光板的坐标信息推到出AGV小车的坐标信息,在辅助加以编码器实时采集反馈到的速度和转向角信息计算与路径规划之后期望的位置坐标的差值,得出任意时刻小车位置和角度偏差值。另外还要注意反光板匹配问题:若扫描仪在旋转约180°时扫描到了4块反射板,就从最后一块板开始匹配,并与期望反射板列表一一对比,以排除是否为同一反射板的可能并确定具体反射板的位置。因为任何来自反射板的光线都要满足一定的规则,才能被系统认定为有效反射板。经过这个流程的判断,筛选下来的反光板就能被用来小车估计位置的校正。
4AGV小车路径跟踪控制
路径跟随的目的是使得AGV能在以給定的速度下沿某条既定的路线行驶。它的原理简要概括如下:激光导航仪把扫描到的的坐标系下AGV坐标信息作为反馈与上位机(工控机)生成的期望路径位姿进行比较,将比较之后的距离和角度偏差作为控制器的输入,经过控制算法的计算得出移动小车需要的平移角度调整量和角速度调整量,并转换成AGV驱动轮轴转速的调整量,由下位机控制驱动轮的转速实现纠偏。AGV运动控制框图如图4所示。
路径跟随算法采用模糊PID控制,PID作为运动控制的经典算法,具有控制方法简单易操作的优点,但是需要获得被控对象的模型才能修正偏差,AGV在实际运行工控下会有一些非理想因素影响参数模型,所以采用智能控制算法辅助PID算法能有效弥补单一算法带来的不足,减小路径追随带来的偏差,增加系统的运行稳定性。对于一些数学模型难以获取的对象,模糊控制因其控制机理易接收和语言控制规则好建立等优点,该控制方法十分适用。因此本论述将采用模糊PID复合控制。
模糊控制与传统PID算法复合控制有2种控制方法:(1)线性复合控制思想:通过一个切换环节分别在2种场景中使用模糊控制和PID控制。如在偏差和偏差变化率较小的时候使用PID控制,否则将使用模糊控制。此方法设计需保证不同算法之间的平稳切换;(2)模糊自整定PID控制:通过模糊控制器的输出来改变PID中的参数值KD、Kj、Kd用来保证系统处于最佳状态。经过实验和对比,最终选择方案2作为模糊PID控制算法,其结构如图5所示。
该控制器以误差e和误差变化率ec作为输入,通过模糊控制器的运算在不同时刻实现基于e和ec对PID参数的在线修改。根据AGV在现场运动的试验和测定,设模糊语言变量e的基本论域[-50,50],偏差变化率ec的基本论域为[-8,8],根据语言值范围设定隶属度函数把输入中的离散值转换为模糊规则中的语言变量值。本论述选取三角形隶属度函数。在MATLAB中得到隶属函数图如图6所示。根据实际纠偏情况和经验制定模糊规则,其规则如下:(1)当lel较大,△Kp应取较大值,△KI取较小值,使系统跟踪性能良好,又能防止微分和积分过饱的现象。(2)当lel和lecl为中等时,AKp,△kd取较小值,△Kj取值适中以防系统超调过大。3leI和lecl较小时,此时的系统超调不能耐太大所△Kp取较小值,△Ki应设定较大以避免系统频繁震荡,△Kd的值适当选取。根据以上原则制定模糊控制器的规则,其规则形式为:ifA and B then C。△KP,△Ki,△Ks输出论域设为[一3,3],并将他们的模糊论域划分为7个等级{NB,NM,NS,ZO,PS,PM,PB},分别对应负大,负中,负小,零,正小,正中,正大。模糊规则曲面图如图7所示,这样模糊控制器就完成了将模糊量按照制定的規则得出模糊输出。最后的控制算法步骤是解模糊,原因是此时的模糊控制器输出还是模糊矢量,并不能直接控制执行执行机构,所以得转换成清晰的控制量数值。本论述利用重心法:将隶属度函数曲线与横坐标轴所包围出的面积重心作为控制器输出。在本系统中模糊控制器的输出是△Kp,△Ki,△kdi.所以最终的输出结果是(设三个参数的初始值分别为KPo,Kio,Kdo):KP=Kpo+△KP;Ki=kio+△Ki;Kd=Kdo+△Kd。
为验证模糊PID较传统PID算法的优越性,通过MATLAB仿真实验对这两种控制方法进行试验,试验曲线如图8所示:系统给定阶跃响应后两种算法的试验曲线种可以看出传统PID在最大超调量,调节时间等响应参数中表现良好,但是模糊PID控制方案更胜一筹,更能准确地控制系统动态响应。表2列出了系统试验时的各项性能指标,从指标参数数值上能更精确的看出两种控制方案的优劣性。
经过上文中的对比分析,决定采用模糊PID作为系统的运动控制算法。图9为实验平台试验AGV智能小车分别在直线、圆和任意曲线规划轨迹下的运动循迹效果。
上述仿真结果说明,搭载模糊PID复合控制算法的运动控制系统能够较快、较好的跟踪任意规划好的曲线,且循迹稳态误差为0,具有较好的稳定性和收敛性。
在计算机仿真验证成功之后,又在搭建的实际实验测试平台中进行导引实验、抗干扰实验等再次证明了模糊PID复合控制的优越性,试验表明该系统能满足AGV在实际工况下的需要。
5结束语
综上所述,作为智能化制造工厂升级的关注重点,本文介绍了一种在车间使用的AGV结构及参数,并对其导航定位方式展开研究,对其路径偏差的修正算法进行设计改进,并通过计算机软件仿真和实验平台试验验证了控制算法的稳定性、有效性。
- HBeAg阳性慢性乙肝患者采用恩替卡韦和阿德福韦酯单药治疗的效果比较
- 帕拉米韦氯化钠注射液治疗儿童流感病毒感染的临床疗效和安全性研究
- 抗菌药物降阶梯治疗新生儿感染性肺炎的疗效分析
- 匹多莫德辅助应用对小儿支气管哮喘肺功能及免疫功能的影响
- 瑞舒伐他汀与阿托伐他汀治疗冠心病的疗效分析
- 七氟醚在开颅血肿清除术中维持麻醉的临床效果研究
- 探讨微创钻孔引流加阿托伐他汀钙治疗慢性硬膜下血肿的疗效
- 鼠神经生长因子治疗急性脑梗死的疗效观察
- 急性脑梗死溶栓后出血性转化患者抗血小板治疗策略探讨
- 单唾液酸四己糖神经节苷脂钠注射液治疗急性脑梗死的疗效及安全性分析
- 局部枸橼酸钠和低分子肝素抗凝在危重症患者连续性静脉-静脉血液滤过中的 应用比较
- 替米沙坦联合比索洛尔治疗高血压心力衰竭临床疗效及不良反应分析
- 丁苯酞联合他汀类药物治疗缺血性脑血管病临床疗效及其对神经功能的影响分析
- 超声引导下连续肋缘下腹横肌平面阻滞与硬膜外麻醉阻滞应用于小儿上腹部手术的镇痛效果观察
- 肱骨近端内固定锁定系统治疗肱骨近端四部分骨折的临床效果探讨
- 不同喂养方式和辅食添加时机对婴幼儿缺铁性贫血的影响研究
- 鼻咽癌患者放疗后放射性口腔黏膜炎发生的相关因素
- 婴幼儿行经胸小切口室间隔缺损封堵术中期随访结局
- 锁定加压钢板联合打压植骨治疗肱骨近端骨折疗效观察
- 人工股骨头置换术与PFNA内固定治疗老年股骨粗隆间骨折的效果对照分析
- 分析T型锁定加压钢板掌侧入路治疗桡骨远端骨折的疗效及对患者腕关节功能的影响
- 经颅磁刺激治疗产后抑郁的效果及预后分析
- 观察宫腔球囊压迫治疗产后出血的应用效果
- 胎儿超声心动图用于先天性心脏病产前诊断中的临床效果观察
- 高龄孕产妇的临床特点及不良妊娠结局分析
- retail²
- retail¹
- retain
- retainabilities
- retainability
- retainable
- retainableness
- retainablenesses
- retained
- retainedearnings
- retainer
- retainers
- retainership
- retainerships
- retainment
- retainments
- retains
- retake
- retaken
- retaker
- retakers
- retakes
- retake/take sth again
- retaking
- retaliate
- 葱葱
- 葱葱郁郁
- 葱蒜类蔬菜
- 葱蓓
- 葱蔚
- 葱郁
- 葱郁的山岭
- 葱青
- 葱黄
- 葳
- 葳蕤
- 葳𦼆
- 葴
- 葵
- 葵丘
- 葵丘之会
- 葵乡
- 葵倾
- 葵倾向日
- 葵倾向日花
- 葵向
- 葵官
- 葵心
- 葵扇
- 葵生