
摘 要: 增强型近地告警系统(EGPWS)是民航飞机上必需的航空电子设备,对保障飞行安全有重要的意义。增强型近地告警的仿真系统是研究增强型近地告警的一个有效手段,在VC 6.0平台下建立飞机的六自由度模型,人机交互界面和告警模块;利用Tilcon软件设计虚拟仪表并研究前视地形的显示方法;同时借助FlightGear飞行模拟器实现飞行仿真的三维可视化显示,通过UDP通信将各个模块连接成一个完整的可视化仿真系统,实现对近地告警和飞行状态直观形象的显示。实验结果表明设计的系统能够对告警模式进行准确有效的报警,并具有可扩展性强、易操作的优点。
关键词: 增强型近地告警系统; FlightGear; 虚拟仪表; UDP通信
中图分类号: TN911?34 文献标识码: A 文章编号: 1004?373X(2015)04?0001?04
0 引 言
在飞机可以操控的情况下,不是由于飞机本身故障或发动机失效等原因,而是由于机组人员在毫无觉察危险的情况下,致使飞机撞山、撞地或坠水的事故称为可控飞行撞地(Controlled Flight Into Terrain,CFIT)事故。国际民航组织统计CFIT是造成飞机和人员伤亡的主要原因[1]。为了避免这种情况发生,近地告警系统(GPWS)逐步得到了应用。GPWS的安装使得CFIT事故大大地减少,但仍然存在需要改进的地方[2]。在GPWS基础上发展起来的增强型近地警告系统(EGPWS)不仅存储各种告警方式的极限数据,而且增加了前视地形警戒和地形显示的功能,解决了警告时间短、无前视功能的缺点[3]。作为飞机上的一种十分重要的航空电子设备,增强型近地告警系统对保障飞行安全有着重要的意义。增强型近地告警仿真系统是研究近地告警的一个有效手段,在增强型近地告警系统真正投入使用之前,仿真系统可以做大量的测试研究工作,能有效提高系统的开发效率,减少直接投入使用的风险和成本。为此,本文以VC 6.0平台为基础设计了增强型近地告警仿真系统。
1 系统总体结构设计
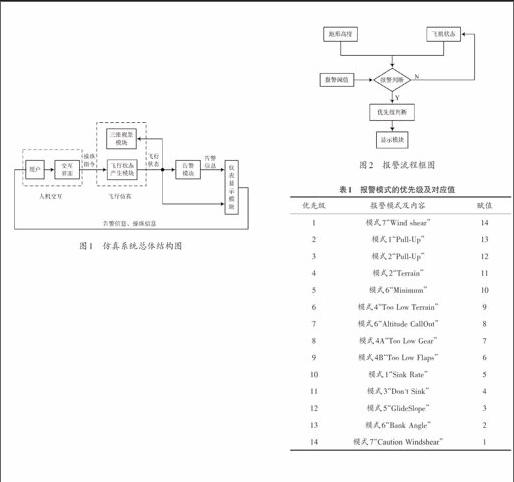
图1描述了增强型近地告警仿真系统的总体结构。该系统包括飞行仿真模块,告警模块,仪表显示模块和人机交互模块。
在人机交互模块配置飞机初始状态和选择告警模式并开始仿真。飞行状态生成模块产生飞行状态信息,分别传送至三维视景模块、告警模块和仪表显示模块。三维视景模块将接收到的信息进行坐标转换,实现视景显示。告警模块将接收到的信息与预先存储的各告警模式的报警阈值进行比较判断,如果满足报警条件,就把报警信息输送给虚拟仪表,虚拟仪表接收飞行状态信息,报警信息等,并进行实时显示。用户根据虚拟仪表的显示信息,利用键盘或操纵杆操纵飞机的运动,飞机状态产生模块对操纵指令进行处理,更新飞机的飞行状态。
2 系统各个模块的设计
2.1 飞行仿真模块
飞行仿真包括飞机飞行状态产生模块和三维视景显示模块。编写程序模拟飞机六自由度模型产生飞行状态信息;充分利用FlightGear飞行模拟器的视景显示功能,配置FlightGear的飞行场景、输入/输出接口等,接收飞行状态信息并转换到经纬度坐标系下,直观、动态的显现民机的飞行过程。
2.2 告警模块
告警模块中包含7种报警模式:
(1) 过大下降率报警;
(2) 过大地形接近率报警;
(3) 起飞或复飞掉高过大报警;
(4) 不安全离地高度报警;
(5) 偏离下滑道太多报警;
(6) 无线电高度和决断高度的报告;
(7) 低空风切变报警。
根据来自飞行仿真模块的信息,结合预先存储的各报警模式的报警阈值,判断是否需要给出报警,并根据报警优先级判断决定给出何种报警,从而给出正确的报警信息。报警流程框图见图2。
对优先级的判断是报警算法中十分重要的一个环节,如果有2个或2个以上的模式同时给出报警时,则根据优先权决定给出何种报警,优先权的高低由危险程度确定。表1给出了报警模式的内容和优先级的高低顺序,并进行赋值,数值越大优先级越高。当系统不给出报警时将数值设为0。在优先级判断的编程中,通过对返回值的大小判断决定给出何种模式的报警信息[4]。
表1 报警模式的优先级及对应值
2.3 仪表显示模块
2.3.1 虚拟仪表的设计
虚拟仪表包括主飞行显示、前视地形显示和告警文字、声音显示。
图3是虚拟仪表显示状态,其中左边是主飞行显示,包括飞机的姿态、空速、马赫数、气压高度、气压基准、升降速度、无线电高度等,右边是飞机前方20 nmi地形显示和告警显示,当有报警产生时,给出相应的语音和文字报警。设计虚拟仪表采用Tilcon软件,其“拖?放”式的图形界面设计,把用户从大量编码的图形界面开发方式中解放出来,使得图形界面的开发过程更为简便[5]。虚拟仪表中预先存储了各个报警模式的报警文字、报警提示音信息。接收告警模块和飞行仿真模块的信息进行显示,给出报警语音及文字信息。使显示更直观、醒目。
2.3.2 地形数据库的建立
地形数据库采用SRTM地形数据,它是由美国太空总署(NASA)和国防部国家测绘局(NIMA)联合测量的。SRTM根据精度不同分为SRTM1文件和SRTM3文件,目前能够免费获取的SRTM3文件。SRTM3每经纬度方格提供一个文件,分辨率精度为90 m,在每个文件中包含了[1 201×1 201]个采样点的高度数据[6]。本文中的飞行场景使用旧金山机场(KSFO)所在的数据块,利用Global Mapper软件进行有关处理后建立SQL地形数据库。将每个网格的信息经过处理采用三参数表示:经度信息、纬度信息和最高海拔高度,从而方便地实现了每个网格点的索引和相应的高度获取[7]。
2.3.3 前视地形显示的设计
在飞机飞行过程中,根据飞机当前的经纬度和航迹角,采用ADO的机制实现对SQL数据库的访问,读取前方20 nmi需要显示的点。结合飞机当前的气压高度和网格中的高度确定点的颜色。在虚拟仪表上采用Tilcon中的绘图函数在指定的位置绘制出不同颜色的点,如表2所示。随着经纬度和航迹角的变化,不断的访问数据库,实时更新地形显示。
2.4 人机交互模块
实现仿真系统和用户之间的交互功能,利用VC++设计人机交互界面,本系统可以对报警模式进行选择,用户可以根据需要选择只有某种报警方式打开,或者报警方式全打开进行仿真。此外,如果虚拟仪表显示报警状态,用户可通过键盘或操纵杆操纵飞机的运动,飞机状态产生模块对操纵指令进行处理,更新飞机的飞行状态,使飞机脱离危险区域。
2.5 通信模块
2.5.1 UDP网络通信
通信模块用于连接飞行仿真模块、告警模块和仪表显示模块,完成数据的接收与发送。在网络中进行通信至少需要一对套接字,其中一个运行于客户端,称之为ClientSocket;另一个运行于服务器端,称之为ServerSocket[8]。飞行仿真模块和人机交互模块分配在客户端,而仪表显示模块和告警模块分配在服务器端,客户端和服务器端部署在不同的机器上。本系统使用UDP传输协议实现数据传输的流程图如图4所示。
为了适应FlightGear的网络通信模块,将FlightGear的输入/输出接口模块进行修改后移植到其他模块中。人机交互模块发送数据包给FlightGear,同时FlightGear中的网络通信模块再转发数据包给仪表显示模块。
2.5.2 FlightGear的网络配置
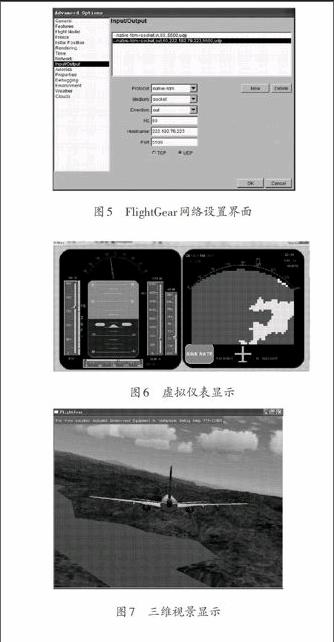
FlightGear飞行模拟器自身具备完善的网络通信能力,只需要对FlightGear的输入/输出接口进行配置。由于FlightGear不但要接收数据,还要转发数据,因此需要同时对输入输出进行设置。首先进入FlightGear飞行模拟器的设置界面,进入如图5所示的选项卡界面。在Input/Output选项中,Protocol选择native?fdm、Medium选择为Socket, Direction为Out,Hostname为另一台计算机的IP地址,Hz项为60 Hz,Port为5 500,选择UDP通信模式,输出设置完成;点击New设置输入,Protocol选择native?fdm,Medium选择为Socket, Direction为In,静态IP缺省,默认127.0.0.1,其余的设置与输出相同。然后点击“OK”即可完成 FlightGear飞行模拟器的网络通信设置[9]。
3 仿真结果与分析
在局域网中使用一台计算机运行民机的飞行仿真模块和人机交互模块,另一台计算机运行告警模块和仪表显示模块,进行联机验证。仿真过程中,利用键盘操纵飞机的运动。
以模式1为例,图6和图7给出了仿真结果。图7是飞行模拟器显示飞机的飞行状态,图6是虚拟仪表显示状态,其中左边是主飞行显示,包括飞机的姿态、空速、马赫数、气压高度、气压基准、升降速度、无线电高度等。右边是飞机前方20 nmi地形显示和告警显示。当下降速率过大时,给出“SINK RATE”的语音和文字报警,飞行员此时应立即操纵飞机加速爬升以规避危险。可以看出,在整个仿真过程中,虚拟仪表能够正确地报警并且实时的更新前视地形显示,整个系统逼真、直观。
4 结 语
本文设计了一个增强型近地告警仿真系统,并联机验证了系统设计的有效性。系统的告警程序是根据霍尼韦尔公司公布的告警阈值编写的,系统中的三维视景模块和地形显示采用的是旧金山机场附近的地形,可以根据实际的需要更换不同的告警程序和飞行场景进行仿真。设计的系统具有可扩展性强、使用方便的特点,为进一步的研究提供了良好的平台。
参考文献
[1] RIGGIN D L. Advisory circular 25?23A, airworthiness criteria for the installation approval of a terrain awareness and warning system (TAWS) for Part 25 airplanes [R]. USA: FAA, 2000.
[2] 刘连生,陈戴维.增强型近地警告系统的特性与实现[J].中国民航大学学报,2007,25(1):120?121.
[3] 宋东,周宇晗,叶浩.增强型近地告警系统建模与报警仿真[J].计算机仿真,2008(25):29?31.
[4] 赵鑫.空中防撞与近地告警综合系统研究[D].南京:南京航空航天大学,2012.
[5] 张加林,李松,汪高武,等.基于Tilcon的VexWork图形界面开发技术[J].指挥控制与仿真,2007,29(5):100?104.
[6] 孙子军,吴东苏,柴功博,等.飞行模拟器EGPWS地形显示模块研究及仿真[J].信息技术,2013(4):8?11.
[7] BOUCHERON L E, CREUSERE C D. Lossless wavelet?based compression of digital elevation maps for fast and efficient search and retrieval [J]. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(5): 1210?1214.
[8] 于琰平.基于FlightGear的四旋翼无人机三维可视仿真系统研究[D].天津:天津大学,2010.
[9] 刘鹏.基于FlightGear的无人直升机飞行仿真技术研究[D].南京:南京航空航天大学,2011.
[10] 韩改宁,李永锋.基于嵌入式的Tilcon用户图形界面设计与开发[J].现代电子技术,2009,32(16):51?53.
- 英语课堂教学三方评价运用之探析
- 课堂活动是“思维开花”的力量
- 探究如何构建高中英语高效课堂
- 合作探究与情景教学在初中英语听说课堂上的运用
- 初中英语课堂教学中英文歌曲的教学作用
- 浅谈如何提高初中英语教学的有效性
- 基于新课标背景下的初中英语反思性教学
- 初中英语教学中的素质教育研究
- 浅析初中英语学困生的成因及转困策略
- 词穷语尽惧写作,柳暗花明思泉涌
- 初中英语教学中学生自主学习能力培养的途径分析
- 初中英语阅读理解障碍中非语言因素的探讨
- 农村初中生英语口语中存在的问题及改进措施初探
- 浅谈合作学习模式在初中英语阅读教学中的应用
- “点拨”让交流展示的精彩再继续
- 农村学校人机对话考试浅析
- 合作学习在初中英语教学中的实践探讨
- 英语语法复习中存在的问题及策略探讨
- 高中英语词汇学习策略探讨
- 高中英语听力教学的现状与对策探讨
- 生本教育观下的学习策略分析
- 设计有效课堂活动,打造精彩英语课堂
- 提问在英语课堂中的有效性
- 践行“道德课堂”的初中英语课堂教学模式
- 创新“微任务”,强化初中英语小组合作教学
- more still life
- more stir crazy
- more stir fry
- more stock car
- more stone faced
- more stony faced
- more strong minded
- more strong willed
- more stuck up
- more sun dried
- more tailor made
- more tax free
- more than anyone
- more than enough
- more than you bargained for
- more than you had bargained for
- more than you (had) bargained for
- more than your job's worth (to do sth)
- more third rate
- more three dimensional
- more time consuming
- more to come
- more tone deaf
- more tongue tied
- more top heavy
- 马虎轻率
- 马虎[马糊]
- 马虎,粗糙
- 马蚁
- 马蚁戴笼头
- 马蚁草
- 马蛇子
- 马蛉菜
- 马蛋
- 马蛤
- 马蜂
- 马蜂儿
- 马蜂儿子
- 马蜂炸了窝
- 马蜂犊子
- 马蜂的屁股——碰不得
- 马蜂窝
- 马蜂蜇秃子
- 马蜂过河——歹(带)毒
- 马蜂针,蝎子尾
- 马蜞
- 马蜩
- 马蝉
- 马蝗叮住鹭鸶脚。
- 马融