韩永成 高磊 冯仁杰 张卉 张涛
摘 要:为了提高机器鱼的进攻效率,提出一种基于S-C形变换的控制算法。通过对仿生机器鱼S形和C形起动的动力学分析,设计机器鱼S形和C形结合的进攻方式,帮助仿生机器鱼在水中更好的达到力量与速度的平衡。
关键词:仿生机器鱼;S形起动;C形起动;控制算法
鱼类游动的高效率、高机动性确保其在高速状态下持久游动和迅速转向。鱼形仿生机器人模仿鱼类的运动模式和外形,摆脱了螺旋桨推进器低效率、高耗能等缺点。[1]仿生机器鱼涉及流体力学、机电、通讯、控制等学科,在海洋生物观察、军事侦察等领域具有重要作用。[2]鱼形仿生机器人为研究新型的水下航行器提供了新思路,具有重要的研究价值和应用前景。
仿生机器鱼能很好地代替人类完成军事侦察、海底地质地貌勘测等危险工作,这就涉及到其动力有效输出问题,对其运动行为进行分析,采用高效的控制算法就显得尤为重要。考虑到机器鱼在水中很难达到力量和速度的平衡,于是提出一种基于S-C形变换的仿生机器鱼进攻型控制算法。
1 仿生机器鱼基本运动控制算法
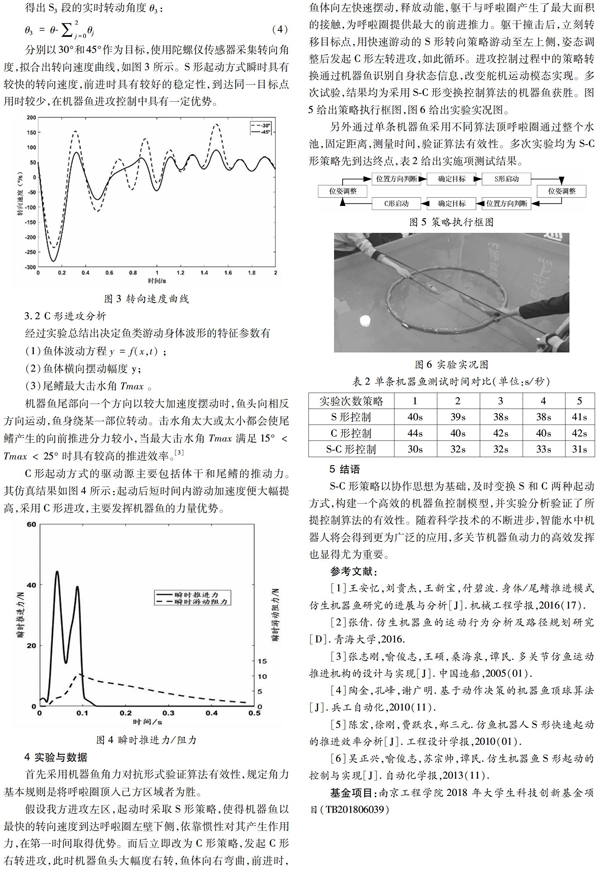
图1为本文实验所用仿生机器鱼机械结构示意图,主要分为鱼头、鱼身和鱼尾三个部分。鱼头主要由控制电路板构成,魚身由三个摆动关节串联构成,鱼尾采用新月型尾鳍。仿生机器鱼采用身体波动推进模式,通过改变电机偏移量来调整速度和方向。
- 小学数学教学中如何培养学生的数学思维能力
- 创客教育下的小学信息技术教学实践
- 小学数学学科核心素养及其培育的基本路径
- 探讨小学生数学自学作业设计的思路
- 探讨小学高年级数学错题本的建立与使用
- 小学数学教学存在的问题及解决策略
- 甘南藏区农牧区小学数学教育的德育渗透观
- 初中数学教学中如何培养学生的自学能力
- 论思维导图在小学高年级数学教学中的实践
- 初中数学教师角色转换与课堂师生互动的研究
- 谈小学数学教育中学生创新思维的培养刍议
- 初中数学教学渗透中数学思想和方法的策略研究
- 设计有效问题优化数学教学
- 基于核心素养下高中数学有效课堂教学分析
- 基于职业能力培养的高职数学课程教学改革
- 中职数学课堂融入核心素养的教学探究
- 浅谈信息技术与小学数学教学的深度融合
- 浅谈生活化教学策略在小学数学教学中的应用
- 动手实践在小学数学课堂教学中的重要性
- 浅析通过信息网络提高小学数学教学效果
- 核心素养导向下小学数学课堂学生问题意识的培养
- 价值视域下传统家风家教融入高校思想政治教育研究
- 关于互联网时代的大学思政课教学探析
- 浅谈高中物理新课改中过程教学实践与体会
- 中职化学教学中解题策略的探究
- reaccenting
- reaccents
- reaccentuate
- reaccentuated
- reaccentuates
- reaccentuating
- reacceptance
- reacceptances
- reaccepted
- re-accepting
- reaccepting
- reaccepts
- reaccess
- reaccession
- reaccessions
- reacclaim
- re-acclaimed
- reacclaimed
- re-acclaiming
- reacclaiming
- reacclaims
- re-acclaims
- reacclamation
- reacclamations
- reacclimatize
- 步兵打战时短距离接触,用上了枪刺的枪支格斗
- 步兵直腿直腰的行进步伐
- 步兵酒厨
- 步兵鲈
- 步兵,兵卒
- 步其后尘
- 步军
- 步卒
- 步历
- 步叉
- 步叔乘
- 步号
- 步后尘
- 步哨
- 步壛
- 步士
- 步天
- 步头
- 步头船步
- 步姑
- 步姿
- 步子
- 步子平稳
- 步子缓慢
- 步子迈得大而快,走得很快