刘欢欢

摘 要:全自动盖章机在自动化办公领域的应用越来越多,其主要工作原理是根据现场传感器信号及工作流程来控制电动机,进而带动机械执行结构完成盖章动作。所以,本文对盖章机中用到的电动机、传感器以及人机交互界面进行选型设计。
关键词:自动盖章;电动机;传感器;人机交互
中图分类号:TH69文献标识码:A文章编号:1003-5168(2021)03-0057-03
Design of Electrical Components of Automatic Sealing Machine
LIU Huanhuan
(Zhonghuan Information College, Tianjin University of Technology,Tianjin 300380)
Abstract: There are more and more applications of automatic stamping machines in the field of automated office, its main working principle is to control the motor according to the on-site sensor signal and work flow, and then drive the mechanical execution structure to complete the stamping action. Therefore, this paper selected and designed the motors, sensors and human-computer interaction interface used in the stamping machine.
Keywords: automatic seal;motor;sensor;human-computer interaction
全自動盖章机能够极大地提高盖章的自动化水平,提升工作效率,其自动运行主要取决于人机交互界面的设计、各部位传感器的设计以及各执行机构电机的选择[1-2]。
1 人机交互界面的设计
人机交互界面是用户控制和使用设备的操作面板,也是设备展示当前信息的屏幕,系统运行的主令信号(复位、启动、停止等)以及手动调整信号可以通过触摸屏人机界面发出。同时,人机界面也显示系统运行的各种状态信息。本设计采用的触摸屏是一种感应式液晶显示器,可接收触点等输入信号。当触摸屏上的触摸按钮被触动时,触摸反馈系统可以根据预先编程的程序运行不同的连接装置来代替机械开关板,而动态图像通过液晶显示器产生动态效果。触摸屏作为一种新型的计算机输入设备,它是最简单、舒适、自然的人机交互方式,有着全新的多媒体视角,是一种极具吸引力的新型多媒体交互设备。触摸屏作为一种新型的人机界面,自出现以来就产生了很大的影响。它简单易用,功能强大,稳定性好,非常适合用于工业环境,也非常适合用于日常生活,应用十分广泛。
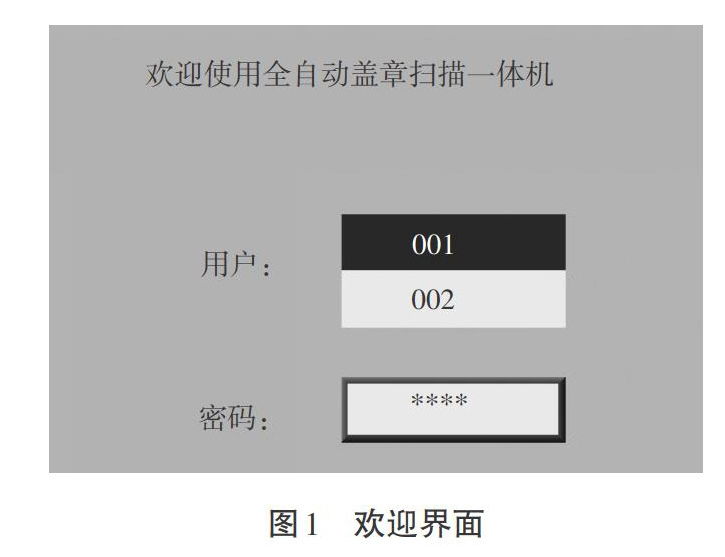
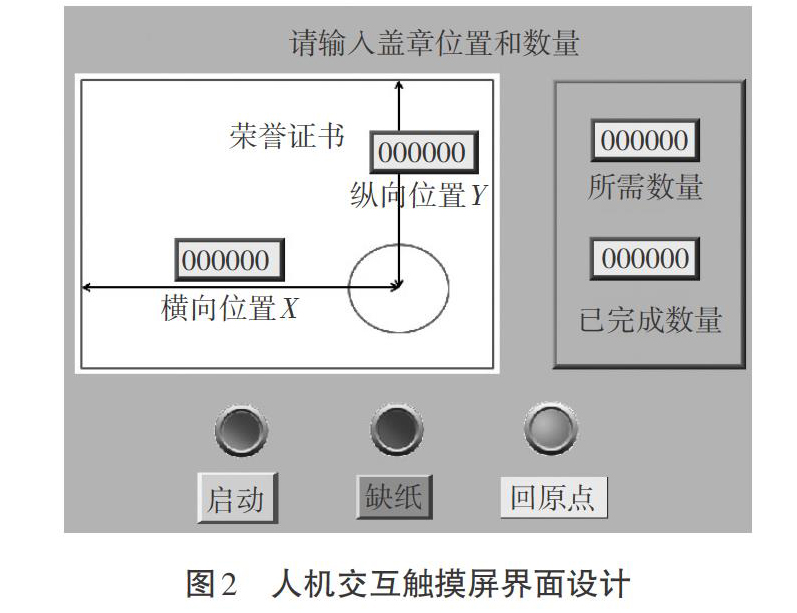
本设计选择威纶通TK6100iv5触摸屏作为全自动盖章机的人机界面。TK6100iv5是一款以低功耗CPU为核心(主频400 MHz)的高性能嵌入式一体化工控机。该产品设计采用10英寸高亮度TFT液晶显示屏(分辨率800×480),运用四线模拟电阻式触摸面板,内存为128 MB,其配合EB8000 V2.0.0及以上版本软件使用。在本设计中,触摸屏与PLC的通信采用工业现场总线,首先进入一个欢迎界面,其中设置了盖章机使用者的用户名和密码管理,触摸屏的欢迎界面设计如图1所示。在用户名和密码正确的情况下,系统进入使用界面,用户需要输入盖章的位置和盖章纸张的数量,同时盖章机显示当前的工作状态以及已经完成盖章的数量,触摸屏的界面设计如图2所示。
使用时,可以选择文本框直接输入盖章位置,也可以将待盖章文件放在盖章位置检测台上进行检测,然后系统自动输入盖章位置,如图3所示。盖章位置检测台由一组拉线式位移传感器组成,横向和纵向各布置一个传感器。其中,横向传感器与纵向传感器的拉线固定在一起,并可以沿纵向轨道滑动,文件放在盖章位置检测台以后,可以拉动横向、纵向传感器的拉线端,定位盖章位置,同时盖章位置可被自动填入控制系统。
2 传感器的设计
传感器是一种能够检测被测信息的装置,能将采集的信息按一定规则转换成电信号或其他所需要的信息输出,用来满足信息的传输、处理、存储、显示、记录和控制等一系列的要求[3-4]。
首先,进纸处放置传感器1,按下盖章机启动按钮后,通过触摸屏选择盖章位置,两个伺服电机在横纵两个方向接连进行定位后,如果传感器1检测到纸张,则搓纸轮运行,将被测纸张在纸堆里搓出,搓进搓纸轮与皮带轮的交接处。根据需要,本设计选择欧姆龙E3FA-DN12 2M圆柱形光电传感器[5]。
然后,在皮带轮与搓纸轮的交接处(即进纸部分)放置传感器2,当纸张被搓纸轮搓到与皮带轮的交接处,被传感器2检测时,搓纸轮停止运行,皮带轮开始进行短距离运行,将证件送入皮带轮上。这里同样选择欧姆龙E3FA-DN12 2M圆柱形光电传感器。
当皮带轮将纸张送到盖章区域(即皮带轮上方的中心位置),传感器3检测到纸张时,皮带轮停止。当单次盖章完成时,传感器再次检测到纸张,皮带轮运行,将纸张从皮带轮中心区域经出纸口送出盖章机。根据需求,本设计同样选择欧姆龙E3FA-DN12 2M圆柱形光电传感器。
已经盖完章的纸张被皮带轮送到出纸口处,被传感器4检测。PLC程序会关联一个计数器,用于检测盖章次数,在达到触摸屏选择的盖章次数时,伺服电机复位回零,若次数不足,则继续进行进纸盖章的循环。这里依然选择欧姆龙E3FA-DN12 2M圆柱形光电传感器。
本设计采用的光电传感器均为漫反射式光电传感器,开关的探测头上装有光束发射器和光束接收器,但漫反射光开关前没有反射器,正常情况下光束发射器发出的光束接收器找不到。当检测对象通过时,它阻挡光并反射回部分光,然后光接收器接收光信号并输出开关信号[6-7]。
在次数达到触摸屏设定数量或按下停止按钮时,两个伺服电机都需要回零,这时需要添加两个伺服回原点接近开关来分别辅助两个伺服电机回零。两个伺服电机回零需要选择电容传感器,而电容传感器又有三种,即极距变化型、面积变化型和介质变化型。本设计选择极距变化型电容传感器来测量位移,使用CJM30-10A2-S电容式接近开关。另外,为了使伺服电机在运行时不超出运动范围,还需要在远离原点一侧加上两个电容传感器,作为越程保护传感器。此处电容传感器需要配合盖章机构上面的一个金属片来检测盖章机构当前的位置。
此外,盖章机构上升和下降时也需要进行限位,本设计采用NPN型霍尔传感器BHY-P7T1,在上升和下降位置各布置一个霍尔传感器,然后在盖章机构末端布置一块磁铁,工作中用霍尔传感器来检测磁铁的位置,进而推断出机构所在位置。传感器选择汇总如表1所示。
3 电动机的选型设计
电动机是根据电磁感应定律将电能转换为机械能的装置。在自动化设备中,其主要任务是产生转矩和转速,作为各个机构的动力源。在全自动盖章机完成盖章的过程中,要对盖章机构的位置进行精确定位,其往返于盖章位置与沾墨位置之间,此外需要对盖章文件进行传送。所以,人们需要根据全自动盖章机机械结构功能的需求,对不同位置所需电机进行选型。
全自动盖章机需要实现盖章机构在横向和纵向的定位,其中,橫向定位选择西门子1FL6(LI)低惯量型永磁同步伺服电机,首先在触摸屏界面上设置输入框,待输入盖章横向位置数据后,横向定位电机将根据输入的数据使盖章机构在横向上到达位置,精确定位。伺服电机具有转速精度较高、动态响应好、位置精度高的特点,非常适合完成定位工作。本设计选用西门子1FL6(LI)低惯量型永磁同步伺服电机,主要原因有三点。一是它适用于动态响应高的地方,在本设计中,适合完成盖章机构定位。二是它的体积较小,盖章机这种适用于各种办公地点的机器本身占用的空间往往需要小一点,所以盖章机体积往往不应该太大,另外,电机太大会导致盖章机内部各方向、各自由度上的机械结构冲突。三是此伺服电机采用自然冷却,环境不会对自身散热有太大的影响。
本着安装和使用方便、调试方便、功能参数一致的原则,盖章机构的纵向定位也选用西门子1FL6(LI)低惯量型永磁同步伺服电机,纵向定位电机使用的功能与横向定位电机类似,区别只是定位方向。也就是说,在触摸屏界面纵向位置输入框中设定数据,纵向电机可以根据输入的数据使盖章机构在纵向上到达位置,精确定位。
盖章机构在平面内的定位是由PLC程序根据触摸屏的输入数据,控制横向定位电机和纵向定位电机的组合来实现的。对位置进行精确定位是保证盖章机实现自动化的重要步骤之一。
搓纸轮处需要连接一台搓纸轮电机,搓纸轮的主要作用就是将纸张从纸堆中搓离,完成分页,然后送入盖章机构中与皮带轮起点的交接处。本设计选用545DC12V直流电机,因为直流电机结构简单,可靠性高,体积小,效率高,在盖章机里适合给搓纸轮提供动力。
盖章机工作期间需要运送盖章文件,此时需要给进纸、出纸的皮带轮连接一个皮带轮电机。皮带轮的主要作用就是将搓纸轮送入机器的纸张送到盖章位置,并将完成盖章的纸张送到出纸口。因为搓纸轮和皮带轮在功能上相仿,所需力矩较小,结构简单,功能简单,本设计选用545DC12V直流电机为皮带轮提供动力。
最后需要给盖章机构的盖章工作配置一个盖章电机,盖章电机的控制要比搓纸轮电机和皮带轮电机复杂一些,因为盖章过程中,盖章电机要配合机械机构。电机正转时,印章向下到达需要盖章的纸张位置进行盖章,完成后,盖章电机两根线反接,盖章电机反转,印章向上运动蘸取印泥,以此来实现电机中的重要步骤——盖章和蘸取印泥。其中,盖章和蘸取印泥时最好有制动来保持盖章状态。因此,盖章电机同样选择545DC12V直流电机,同时需要配置电机的制动器。电动机选型汇总如表2所示。
4 结论
全自动盖章机使用者通过人机交互界面设置了需求信息,控制器读取触摸屏信号,进而通过采用各种传感器的信号来控制电动机,保障全自动盖章机的正常工作。本文选取了合适的电气元件进行设计,未来将进一步制作样机,验证选择的正确性。
参考文献:
[1]高艳芳,豆贺,温晓鑫,等.自动盖章机的研制[J].中国科技信息,2017(14):67-68.
[2]荣宪贵.办公机械新设备:自动连续盖章机通过鉴定[J].机械工程师,1984(2):29.
[3]李占贤,田月,张雅琛,等.学生证自动盖章机设计[J].华北理工大学学报(自然科学版),2017(3):63-65.
[4]颜定祎,谭华,肖鹏,等.递送式自动翻页盖章机研究[J].机械,2014(3):40-42.
[5]陈琼,吕原君,刘成尧.自动盖章机的结构设计与控制[J].机床与液压,2021(2):87-90.
[6]程宏佳.新型全自动盖章扫描一体机结构设计[J].机电信息,2021(6):43-44.
[7]毛江山,赵彦旻,于敏英,等.智能盖章机的设计研究[J].工业设计,2016(8):143.
- 高中地理教学中传统文化的渗透探析
- 化学课堂应是集人文性、知识性、高效性、趣味性于一体的艺术殿堂
- 核心素养视野下高中语文群文阅读教学研究
- 谈初中英语兴趣教学的有效开展策略
- 谈生活化初中化学实验的设计
- 语境理论下的初中英语阅读教学理论与实践分析
- 新时期初中信息技术教学中的问题和对策研究
- 合作探究教学模式在高中政治教学中的应用
- 初中体育教学中如何提升学生主动参与的策略探究
- 初中信息技术教学与培养学生网络学习能力的探究
- 在初中英语教学中渗透生命教育的相关研究
- 初中英语教学感悟
- 中学语文教学问题及创新探讨
- 浅谈初中数学的教学反思
- 基于核心素养下高中物理学史的教学作用
- 小组合作在小学信息技术课堂上的应用
- 提升高中生音乐鉴赏能力高效教学方法探究
- 初中体育教学中德育渗透的策略探讨
- 初中英语教学实践中的心得体会
- 高中物理教学培养学生学科核心素养的策略
- 新媒体背景下高职院校大学生人文素质教育有效路径研究
- 如何上好一堂思政课
- 对新时期初中教师师德建设的探讨
- 关于国际教育中A-Level考试局课程体系的比较
- 浅谈电影对中小学生的教育功能与渗透力
- let sb into sth
- let sb know
- let sb off
- let sb off the hook
- let sb out
- let sb see
- let sb/sth loose
- let sb take a look
- let sb use/let sb have
- let's face it
- (let's) get this show on the road
- let's get this show on the road
- let's hope
- let-sleeping-dogs-lie
- let-slide
- let slip
- let-slip
- let somebody out
- let-someone-have-it
- let something out
- lets-on
- lets out
- let sth go
- let sth go to your head
- let sth out
- 文学作品的表现形式
- 文学作品的风格、韵味
- 文学作品超逸佳妙
- 文学作品里的语言
- 文学侍从之职
- 文学侍从之臣
- 文学先生
- 文学写作
- 文学创作
- 文学创作上从大处着眼不拘泥于细枝末节
- 文学创作中能尽情发挥,无拘无束
- 文学即人学
- 文学史
- 文学大家
- 文学女士
- 文学家
- 文学家是阶级的耳目与喉舌
- 文学形象
- 文学才华
- 文学批评
- 文学批评原理
- 文学批评标准
- 文学批评的“圈子”
- 文学掾
- 文学是社会的家庭教师