
【摘 要】为减轻系统重量,便于携带,同时降低操作复杂程度,论文设计了一种便携站天线伺服系统。系统中采用了大量一体化设计理念,使得成品结构简单,体积小、重量轻。程序中采用了多项软件算法使得对星过程简单高效。便携站天线可单人背负,可实现一键对星,应用于抗震救灾、应急通信等方面具有较大优势。
【Abstract】In order to reduce weight, easy to carry and operate, a portable station antenna servo system is designed in this paper. The system uses a large number of integrated design concept, so that the finished product structure is simple, small size, light weight. The program uses a number of software algorithm makes the satellite simple and efficient .It has great advantages in earthquake relief, emergency communication and so on.
【关键词】一体化设计;角度标校;航向校正
【Keywords】integrated design; angle calibration; heading correction
【中图分类号】TN927 【文献标志码】A 【文章编号】1673-1069(2017)06-0195-02
1 引言
在应急通信中便携式卫星站作为联系现场和后方指挥中心的纽带,可以将后方指挥中心搬移到现场来,从而在现场搭建现场应急救援的最高指挥场所。为此我们进行了便携站天线的设计,设计理念:一体化设计以便于携带、智能化设计以便于操作简单。
天线在结构上采用一体化设计,重量轻,外形美观。伺服和结构一体化设计,伺服尽量选用体积小,重量轻的元器件,并且驱动与电机采用—体化设计;伺服控制跟踪盒安装在天线底箱里,这样无需单独的伺服控制机箱以及相应的控制电缆,整个天线外形简洁美观。整体外观图见图1。
2 设计原理
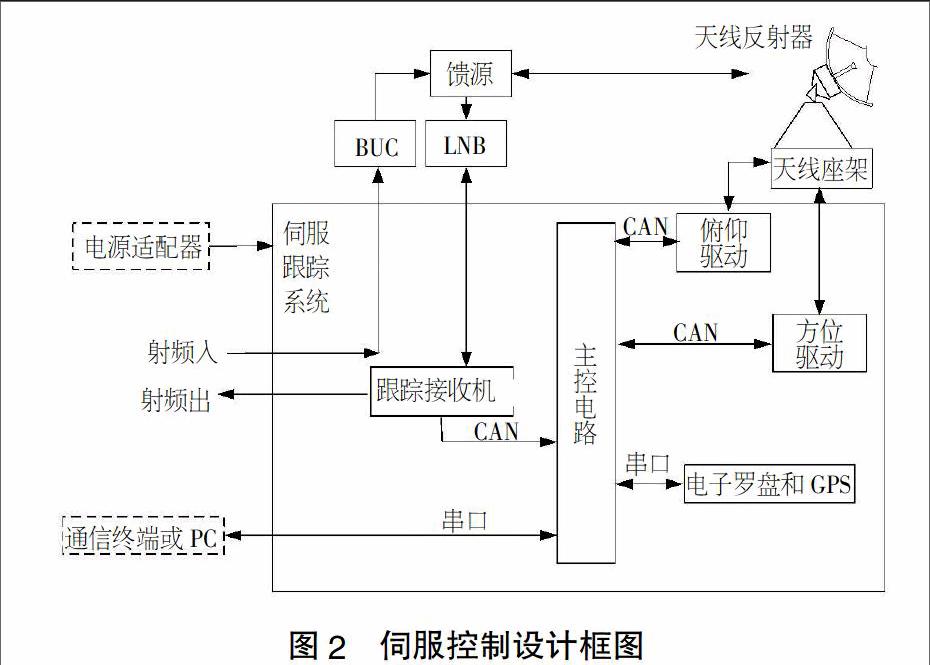
系统设计如图2所示,此系统可分为主控模块,驱动模块、跟踪接收机模块、罗盘和GPS模块,各模块的功能如下:
主控模块,主要实现信息采集,衛星位置算法实现和驱动电机转动的功能,是整个系统的核心。通过数学运算得到卫星理论角度,然后控制电机转向理论角度,实现位置闭环。
驱动模块,主要是利用步进电机实现两个轴向的转动,以及获得电机轴的位置反馈。当电机出现故障时能够及时停转,保护系统不会造成更大的损失。
跟踪接收机模块主要为信标接收机,实现天线大致对准卫星后的精确跟踪,是系统不可或缺的一部分。
罗盘和GPS模块,主要由罗盘和GPS天线组成,系统利用GPS实现得到准确的当地经纬度的信息,利用罗盘实现便携天线的定向姿态信息。
3 硬件设计
3.1 主控板设计
主控板采用高速单片计算机作为控制核心,主控板是伺服控制跟踪系统的核心,采用功能模块化和一体化的设计方法,实现采集罗盘、GPS、轴角、接收信号以及驱动电机等功能。
3.2 CAN总线技术
由于本系统中使用了大量具有CAN总线接口的模块,例如电机、跟踪接收机等。如果使用传统点对点连接方式则会带来大量的电缆,而使用CAN总线的连接方式,模块之间只需要使用4根连接线即可完成系统的通信。
3.3 步进电机驱动控制
天线驱动采用步进电机,考虑到体积小型化、控制简单可靠、功耗情况和供电形式选用小型一体化步进电机。驱动器与电机采用整体设计,带12位码盘反馈。具有CAN总线接口,与主控板全数字交互数据,有效提高了控制精度,简化了控制电路。
3.4 电子罗盘和GPS的选取
目前,市场上定向定位产品基本为惯导、寻北仪、电子罗盘、GPS /北斗等产品[1],他们各有市场需求,对于本项目我们选取了电子罗盘加GPS方式,理由如下:
惯导、寻北仪定向精度高,不受天气、昼夜、地磁场和场地通视条件的影响,但是价位高、体积大,不适用于便携站天线系统中。
电子罗盘是利用地磁场来定北极的一种方法,成本低、体积小、定向精度较高(0.5度)。但是受地磁环境以外产生的磁场影响较大吗,只能获取大致航向,再通过伺服系统扇扫来锁定目标。
GPS/北斗是通过卫星定位,GPS与北斗信号可自由切换,其体积小、重量轻、功耗低,所以本系统采用GPS+电子罗盘的形式来定位定向。
3.5 跟踪接收机模块
跟踪接收机主要的功能是卫星信号进行处理,解调出AGC电压,提供给主控板,使天线准确对准卫星,跟踪接收机同样具有CAN总线接口,便于系统连接。
4 软件设计
4.1 软件流程
伺服控制软件运行在主控板上,系统上电后,首先初始化,然后自动采集限位、定位定向以及故障等信息;等待系统命令。一旦收到一键寻星命令,系统进行星位计算,马上驱动天线转到理论位置,然后进入快速扇扫步骤,跟踪接收机锁定后自动运行旁瓣识别程序,确认主瓣后进入跟踪程序,直到跟踪到信号最强,对星完成。
4.2 关键技术
4.2.1 角度标效技术
本系统中使用的12位码盘反馈为增量式。为防止角度有误,每次上电需要将角度校准。系统中安装标效开关,或者限位开关也可当作标效开关使用。系统出厂前置入标校开关角度信息,系统上电后,自动标效角度。标校步骤如下:
①系统开机,轻触对星按钮;
②俯仰轴自动高速上转,寻找俯仰校正开关或限位开关;
③转动过程中实时检测开关信号,如有信号返回立即停止转动;
④俯仰以低速下转,缓慢脱开开关;
⑤脱开后继续低速上转,直至再次碰到开关;
⑥将此开关角度信息作为目标值,反向计算俯仰校正数值。
至此俯仰角度标校完成,同样原理,方位也可以使用此种方法标校。
4.2.2 航向校正技术
电子罗盘容易受磁场影响,为了避免该问题,伺服控制软件中采用了卫星标校法来校正天线角度[2]。
在进行天线标校时,首先对准一颗稳定的同步卫星,由于所对卫星的经度以及当地经纬度信息是确定的,故可以计算出该卫星的理论方位、俯仰角。
根据计算所获得的方位、俯仰角与天线当前实际对星角度相减,即可获得罗盘的航向偏差。使用该技术实现了对星的准确性,提高了对星速度。
5 结语
本文设计了一种便携站天线伺服系统,该系统采用一体化、智能化设计。在系统中应用了大量整体—体化设计理念使得整个系统体积小、重量轻。同时伺服控制软件采用多项技术,降低了系统使用难度。随着卫星通信的发展,以及国家应急通信的需求日益增加,便携天线将会在各个领域中发挥更大的作用。
【参考文献】
【1】魏英杰.动中通地面站卫星天线伺服控制系统[J].无线电通信技术, 2007,33(3) :30-32.
【2】梁志杰,郑帅,黄国帅,等.基于多频段中继卫星的无塔快速标校技术[J].现代电子技术,2015(8):35-36.
- 浅谈新型城镇化背景下物业管理发展的新思路
- 浅谈企业工会工作存在的问题与对策
- 高速公路档案管理工作探析
- 企业档案数字化所面临的问题及对策思考
- 浅谈移民避险搬迁安置项目档案管理环节
- 少儿图书馆在滋养童心中的重要性
- 知识管理应用于企业档案管理信息化建设的必要性研究
- 地方文献分类之我见
- 浅谈现代信息技术对企业档案管理的影响及对策
- 浅论如何发展我国电子档案的管理和应用
- 基于勘测设计企业档案管理的研究
- 浅谈国土档案信息共享与利用服务存在的问题与对策
- 基于GIS的城建档案信息系统功能优化探究
- 公共图书馆数字资源推广实施策略
- 信息化时代下高校基建档案实现信息化管理相关思考
- 如何重视医院档案价值强化医院档案管理
- 论如何加强建设工程档案收集工作确保归档质量
- 建立不动产登记档案管理新模式的探讨
- 档案信息化建设与档案管理的几点思考
- 提升事业单位档案管理信息化建设的方法策略
- 浅谈党校档案管理工作中存在的问题及改进措施
- 成人教育档案管理中的问题及对策探讨
- 机关事业单位档案管理中的电子档案管理策略分析
- 浅谈如何建立残疾人就业档案
- 节能减排档案正规化管理和创新实践的若干思考
- companies registry
- companiesregistry
- companion
- companionage
- companioned
- companionhood
- companioning
- companionless
- companionry
- companions
- companionship
- companionships
- company
- company abbreviations
- companycar
- company car
- companydirector
- company director
- company doctor
- companydoctor
- companying
- companyless
- companylimitedbyguarantee
- company limited by guarantee
- companylimitedbyshares
- 虚实题
- 虚宠
- 虚客族
- 虚室
- 虚室上白
- 虚室生白
- 虚宿
- 虚寂
- 虚局
- 虚岁
- 虚左
- 虚左以待
- 虚左而迎
- 虚巧
- 虚己
- 虚己下贤
- 虚己以听
- 虚己受人
- 虚己听受
- 虚己纳物
- 虚席
- 虚幻
- 虚幻不可实现的愿望
- 虚幻不可捉摸
- 虚幻不实之物