张闯 张国涛 赵龙葛 矣璐 弓雯静 周世宽
【摘? 要】在物流业迅猛发展的当今社会,需要大量的从业人员有丰富的经验和能力,因此,物流仿真也在此时孕育而生。物流仿真是通过各种企业数据或合理的假设在计算机上编制相应的应用,来模拟出物流系统实际或即将发生的运行状况,可获得最接近真实状态下的结果。测试并查验仿真过程当中运行下的绩效,并统计和收集模拟结果,作为物流运作规划中的方向。论文利用TaraVRbuilder对物流分拣中心进行仿真,对快递分拣业务加以分析。
【Abstract】In the rapid development of the logistics industry in today's society, a large number of practitioners need to have rich experience and ability, therefore, logistics simulation is also conceived at this time. Through a variety of enterprise data or reasonable assumptions, the corresponding application of logistics simulation is compiled on the computer to simulate the actual or impending operation of the logistics system, and the results under the closest to the real state can be obtained. Testing and verifying the performance during the simulation process, and collecting the simulation results. Taking it as the direction of logistics operation planning. This paper uses TaraVRbuilder to simulate the logistics sorting center and analyze the express sorting business.
【关键词】物流分拣;TaraVRbuilder;仿真
【Keywords】logistics sorting; TaraVRbuilder; simulation
【中图分类号】TP391.9? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文献标志码】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文章编号】1673-1069(2020)09-0192-02
1 物流分拣系统模型研究目标
1.1 TaraVRbuilder仿真建模简介
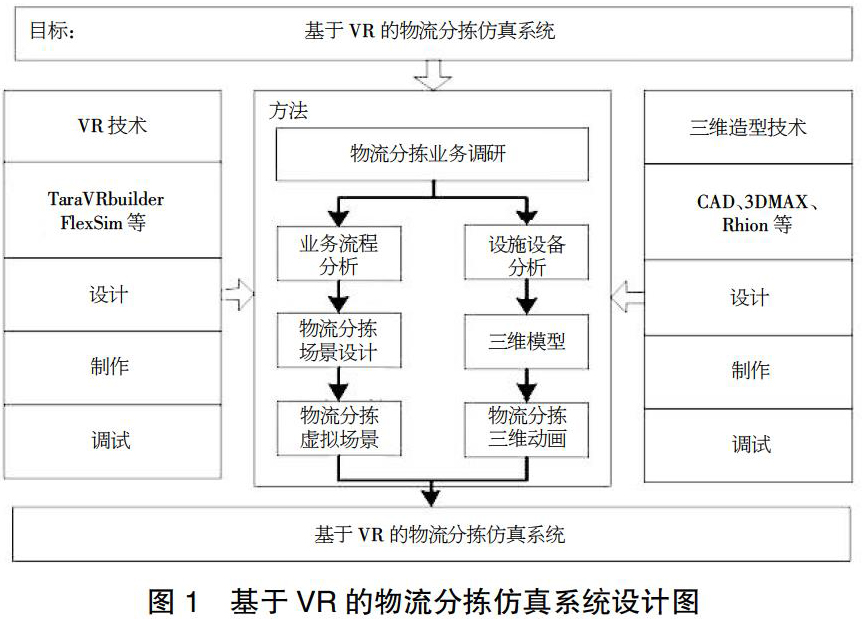
TaraVRbuilder是由德國tarakosGmbH公司开发的一款应用于物料流领域、输送科技领域以及工厂计划领域内简便快捷地创造动态三维窗口的软件。该程序的特色在于其用户在编程和三维设计技能都较为缺乏的情况下,能够实现最大效率地对虚拟、三维动画场景进行创建,也被称为“数码工厂”。利用TaraVRbuilder构建只要按照计划方案在界面上选择建模必要的装备,将各个装备按照计划方案智能地链接,进而构建成体系,同时还必须要计划好各个相干元素的属性,掌控其各关键计划以组成总体。
1.2 物流分拣业务
物流所采取的分拣体系主要有三种,目前最智能化的系统全自动分拣体系,全自动分拣系统主要通过计算机的程序设定将货物进行全自动化的分拣和运算处理。它是目前物流中最能影响配送效率的关键因素之一,任何一个大型的快件企业若失去全自动分拣系统都很难能够获得高额利润。较全自动分拣系统更加遍及的是半自动分拣体系,该体系是指经由计算机提前将快件信息进行辨认,再有一定数量的操作人员根据识别出来的信息快速地进行快件分拣的工作。这种分拣方式有着成本低、规模小的特点,所以应用也较为广泛。但从企业发展的长远来看,人工成本也是相当高的,终将被自动分拣所取代。人工分拣因其费用高、效率低也在逐渐被淘汰,而且还存在出错率高、暴力分拣等问题。
2 物流分拣业务调研及前期准备
结合自动化立体仓库进行物料仓储与调度管理的实际情况,拣货作业流程表现:电脑编写程序控制AGV小车行走路线及堆垛机搬运路线,机械手抓取货物放置AGV小车托盘上,由AGV小车在规定路线上运送货物至自动化立体仓库前传送带上,通过传送带传感器确认小车到达指定位置后,机械手将货物运送到托盘,再经传送带到达堆垛机,堆垛机将货物放置指定货位。堆垛机及AGV小车按照制定路线回到起点,重复操作。确保堆垛机将全部货物按顺序放置在货架空余货位上,以准确完成全部操作。
根据上述对自动化立体仓库拣货作业流程进行分析:①扫描行走的货物;②搬运货物;③挑拣货物。具体根据仓储管理实际情况,进行该分拣模型的仿真和优化。
3 基于TaraVRbuilder的3D模型搭建
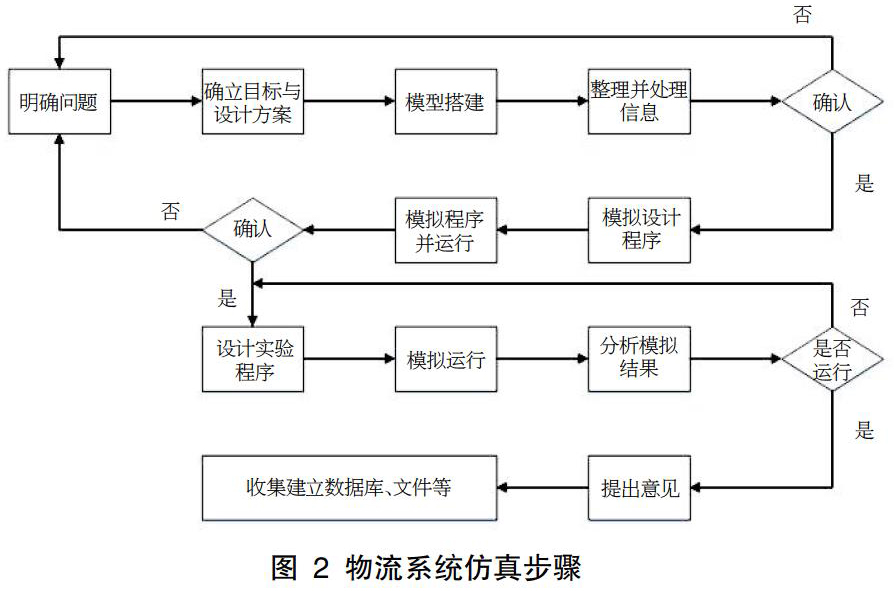
3.1 物流分拣系统仿真步骤设计
物流系统仿真步骤如图2所示。
3.2 TaraVRbuilder仿真参数设定
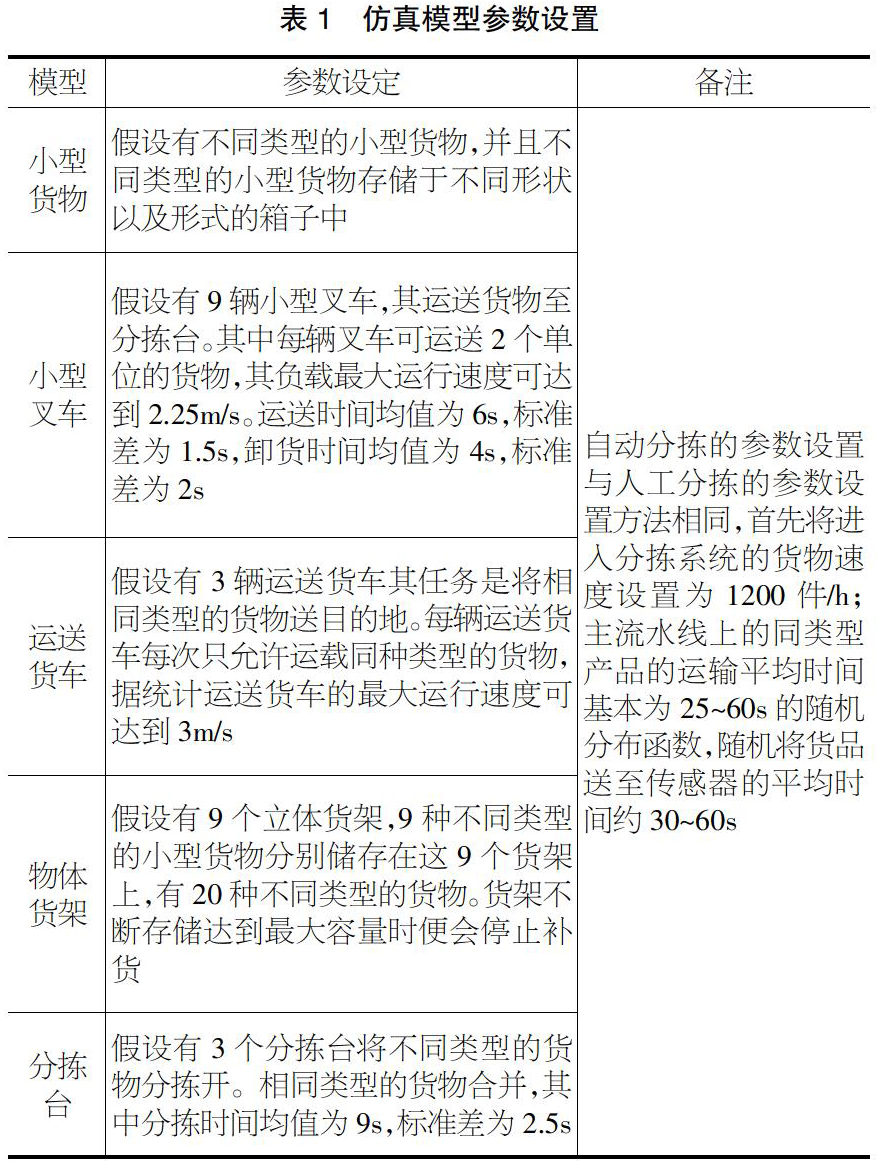
根据典型物流中心的经验参数,参数设置:职工行走速度1m/s,传递时间为1s。小型叉车运行时的空载前进速度约为3.6m/s,后退运行速度为2.0m/s,抬升速度为0.35m/s,下降速度为0.35m/s;小型叉车运行时的负载前进速度大概为2.25m/s,后退速度为1.5m/s,抬升速度为0.25m/s,下降速度为0.45m/s。货物出货的频率为6s。
仓储中心的分拣订单作业用到的物体对象参数均可以从TaraVRbuilder仿真软件中找到,无需设计其他参数。实体对象的参数设置如表1所示。
运行过程:设置完成每一个实体对象各个的参数后,即可开始运行。在系统运行一段时间以后,通过观察发现由于分拣机器人不够导致分拣口货物拥堵,需优化参数。
参数设置:因分拣口存在较为严重的拥堵,为提高分拣口效率,现需修改实体对象的参数。以下为三种修改方案:①添加3台分拣机器人,增加机器人即可很大程度地提高作业效率;②添加3个分拣口;③设立1个立体暂存仓库,将未能及时运送的货物进行暂存。
运行结果:把实体对象的参数调整后,再次进行模拟运行,在48h内无任何拥堵现象,整个模型良好运行。在此状态下,该分拣过程需6台分拣机器人、6个分拣口、2个立体仓库。
【参考文献】
【1】高科,潘建辉.自动化仓库物流分拣优化分析[J].自动化应用,2020(02):140-141.
【2】韩嘉童,张莹莹.基于FlexSim的订单分拣系统仿真及优化[J].物流工程与管理,2019,41(05):75-76+63.
【3】王林帅,纪寿文.基于tara的B型保税物流中心设施仿真优化研究[J].物流技术,2012,31(21):406-408.
【4】杨琼华,高超,刘秀菊,等.基于taraVRbuilder的快件分拣系统建模与仿真[J].重庆科技学院学报(社会科学版),2012(13):70-72.
【5】韩嘉童,张莹莹.基于FlexSim的订单分拣系统仿真及优化[J].物流工程与管理,2019,41(05):75-76+63.
- 内部控制质量、研发投入与企业绩效
- 基于空间关联分析的自然资源生态绩效评价
- 管理者心理特征与企业创业绩效
- 全球报告倡议GRI的最新发展及应用
- 事业单位预算管理现状调研分析
- 城投债信用风险的传导机理与预警系统研究
- 不同视角下我国政府会计信息披露研究的述评与展望
- 企业环境绩效:评价与实证研究
- 基于霍尔三维结构的政府绩效审计优化研究
- 注册会计师审计对管理层机会主义行为的约束
- 新审计报告准则下CPA披露无效信息的动因分析
- 上市公司审计质量多阶段三方博弈分析
- 领导干部经济责任债务审计服务国家治理研究
- 基于学历—职称的人才资本测算研究
- 预算助人行为:构念与量表
- 共享发展理念下财务学初次分配理论和实践创新
- 债务水平、政府扶持与环境绩效
- 低碳经济下我国碳会计研究热点可视化分析
- 对我国创业企业知识产权质押融资的思考
- 我国民航业“节能减排”的投资效率
- 众筹平台激励型监管对发起人策略行为的影响
- 投资者非理性行为对投资决策的影响研究
- 中国黄金期货价格的SVR智能预测研究
- 支付行业投资价值实证分析
- 论当今中国社会寻租行为的异质性
- recovered
- recoveree
- recoverer
- recoverers
- recoveries
- recovering
- recoverless
- recovers
- recovery
- recovery period
- recoveryperiod
- recradle
- recrate
- recrated
- recrates
- recrating
- recreate
- recreated
- recreates
- recreating
- recreation
- recreational
- recreationalist
- recreationally
- recreation's
- 蟹爪
- 蟹爪兰
- 蟹獴
- 蟹眼
- 蟹眼汤
- 蟹胥
- 蟹脐
- 蟹腹下面的薄壳
- 蟹荒蟹乱
- 蟹螯
- 蟹酱
- 蟹钳
- 蟹青
- 蟹黄
- 蟺
- 蟻
- 蟾
- 蟾中之王
- 蟾光
- 蟾兔
- 蟾圆
- 蟾宫
- 蟾宫客
- 蟾宫扳桂
- 蟾宫折桂