【摘要】基于提升基坑监测作业效率、避免人为因素,本文采用基于全自动全站仪的基坑无线远程自动化监测系统对工程进行监测,通过对系统数据的分析,验证得到此系统极大的提高了工作效率,还可进行长周期、高频率、多目标的监测,因此可以投入实际生产使用。
【关键词】全自动全站仪;基坑;自动检测系统
【Abstract】Based on improving the efficiency of foundation pit monitoring work and avoiding human factors, this paper uses a fully automated total station based pit wireless remote monitoring system to monitor the project. Through the analysis of the system data, this system has been verified to greatly improve the work Efficiency, but also for long-cycle, high frequency, multi-target monitoring, it can put into practical production and use.
【Key words】Automatic total station;Foundation pit;Automatic detection system
1. 引言
(1)由于建筑需要,基坑施工開挖越来越深,从最初的4~8米发展到现在的20多米,而传统的基坑监测主要是在现场布置
一定的传感器或仪器后,通过人工定时读取数据,这样是不能实时采集到数据,并且会延误预警或是处治的最佳时间。
(2)因此,为提高效率,采用基于全自动全站仪的基坑无线远程自动化监测系统,全自动全站仪是一种自动搜索、跟踪、辨识和精确照准目标并获取角度、距离、三维坐标以及影像等信息的智能型电子全站仪,可代替人工并进行连续监测,通过数据分析软件处理,更加准确、有效地对基坑整体稳定性进行监测。
2. 系统原理
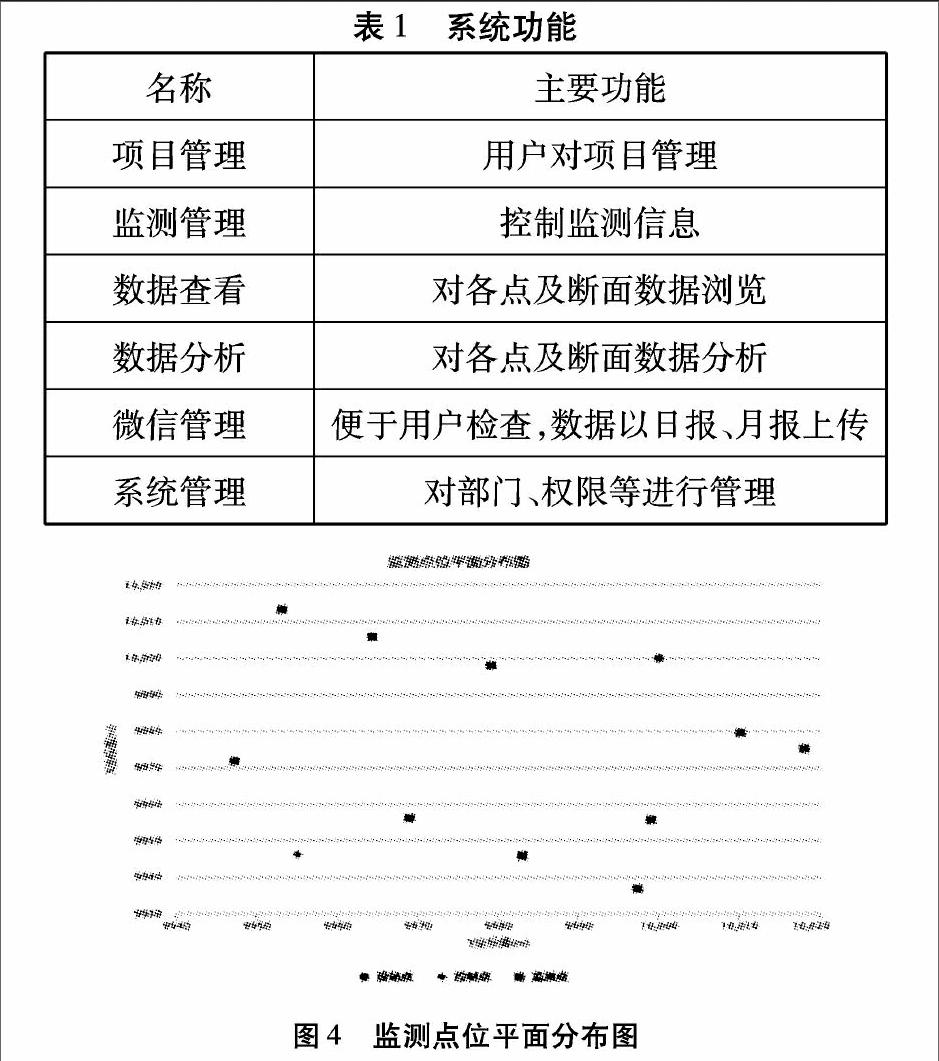
2.1系统功能(见表1)。
2.2工作原理(系统架构见图1)
本系统通过无线传输模块和数据采集器连接现场的各种传感器,实现对基坑岩土体内部沉降、地表位移、倾斜、地下水位等一系列影响基坑安全稳定关键的参数进行连续监测。监测数据实时上传至云计算平台,由专用的计算机数据分析软件处理,对基坑的整体稳定性做出判断,快速做出基坑坍塌等灾害发生的预警预报,更加准确、有效地监测灾情发生,能够对保障基坑结构运营安全起到至关重要的作用。
3. 工程应用
3.1项目概况。
本项目的依托某明挖隧道工程,对明挖隧道基坑段ZK1+478~YK2+780、YK1+595~YK2+850,进行了自动化监测系统的试点应用。项目路线主线采用双向6车道,全长约2.3公里。
3.2监测点布置。
根据基坑具体情况,在基坑上布置7个监测断面,每个监测断面布置2个测点,在各监测点上安置小型棱镜。考虑到全自动全站仪的测量精度和测量距离根据现场实际情况设置1~2台自动全站仪,一般在基坑中部或者在基坑长度的1/4处和3/4处分别设置一台全站仪保证监测范围全覆盖,同时,在远离基坑(大于50米)的稳定处设置基准点(桩顶位移监测点的布置示意图见图2、监测点位三维分布图见图3、 监测点位平面分布图见图4)。
3.3监测数据分析。
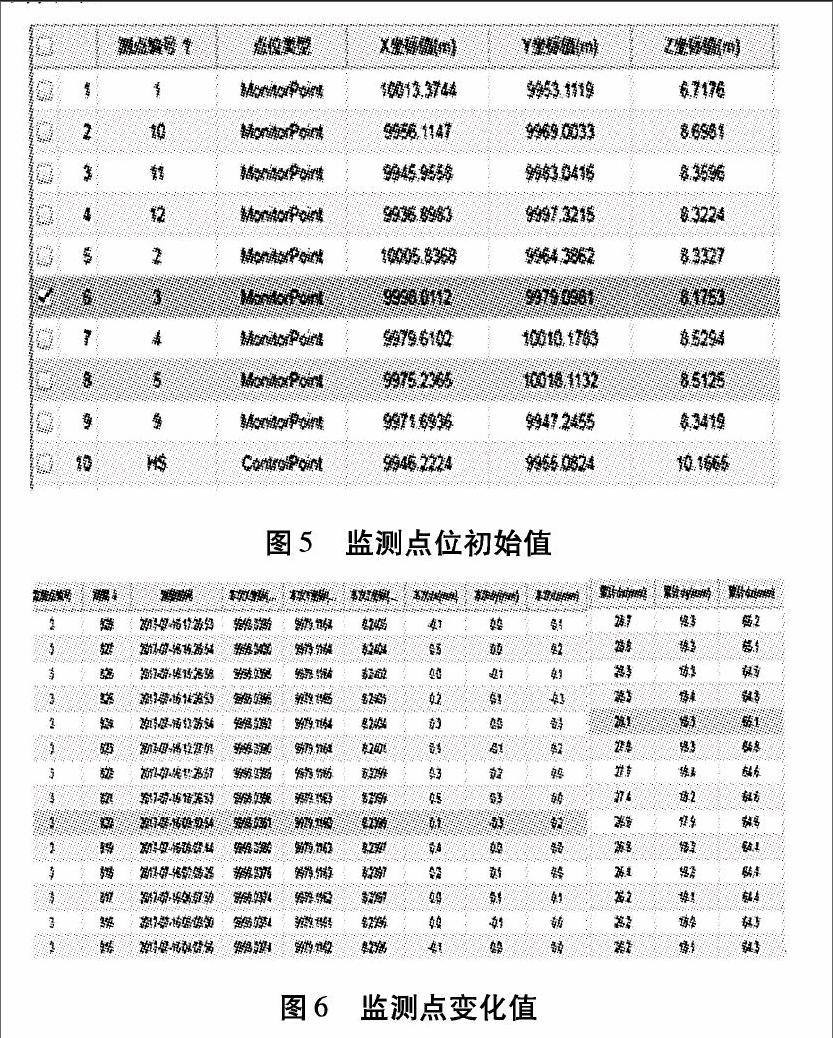
(1)监测点位初始值(部分),如图5所示。
(2)监测点变化值(部分),如图6所示。
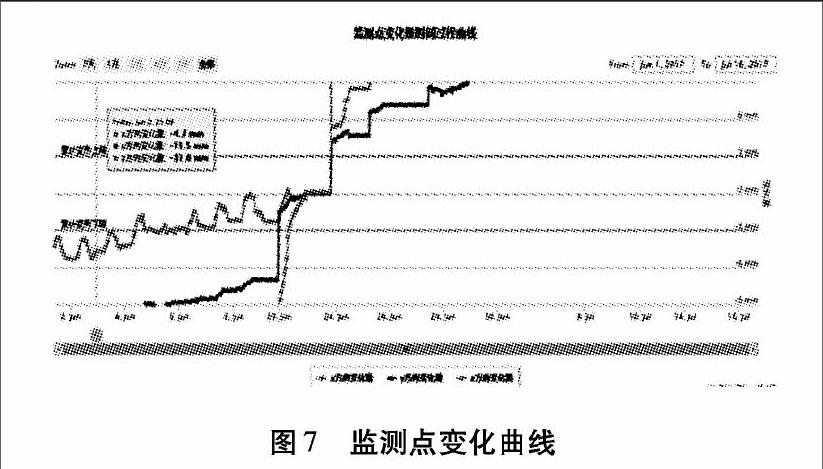
(3)监测点变化曲线(部分),如图7所示。
从图中可知,在全自动全站仪的基坑无线远程自动化监测系统中可清晰获取各监测点数据,对其进行分析(如图7),系统快速绘制出变化曲线图,将基坑真实情况更加直观的呈现出来,保证了项目在基坑开挖及回填阶段施工的基坑安全。
图7监测点变化曲线
4. 结论
全自动全站仪相对于传统的经纬仪、全站仪具有自动化的功能,可以快速识别并迅速作出分析,完全代替人工操作,避免因人为因素而产生的误差;利用全自动全站仪的基坑无线远程自动化监测系统,可对基坑项目进行长周期、高频率、多目标的监测,可以极大的提高工作效率,本项目监测点较多,常规测量需要半天时间,而应用本系统,可以在15分钟内完成,达到了省时省力的效果。
参考文献
[1]惠理军. 测量机器人在基坑监测项目中的应用[J]. 冶金丛刊, 2017(3):124~126.
[2]张君华, 马波, 陈杰. 基坑变形的测量机器人自动监测系统开发与实现[J]. 矿山测量, 2016(1):30~32.
[3]张君华, 张宇琳, 许文涛. 基坑变形的测量机器人自动化监测研究及系统设计[J]. 测绘技术装备, 2015, 17(1):91~93.
[4]高改萍, 李双平, 苏爱军,等. 测量机器人变形监测自动化系统[J]. 人民长江, 2005, 36(3):63~65.
- 长尾化视域下我国酒店业在线营销现状及建议
- 乡村振兴战略视域下农村电商物流模式创新研究
- 京东生鲜物流质量对顾客满意的影响研究
- 东北地区产业结构升级与中小企业物流效率变革研究
- “二元”育人推动职业院校服务区域经济
- 高职院校《证券投资分析》课程思政教学改革
- 对官方微信公众平台传播商业文化的探究
- 大学校园网络贷款的成因与风险防
- 高校财务共享服务研究
- 地方应用型本科院校金融工程专业创新创业人才培养机制研究
- 新媒体背景下大学生校际交流的平台搭建研究
- 论高职院校会计专业工匠精神的培育
- 基于CDIO理念的应用型财务管理人才培养模式的教学改革研究
- 高校教育成本与财政补偿机制的探讨
- 大数据背景下农林院校双创型人才协同创新培养模式研究
- 黑龙江省高层次人才引进的问题分析
- “一带一路”背景下黑龙江省与乌克兰农业合作研究
- 黑龙江省网络经济建设研究
- 黑龙江省开发区改革与创新对策研究
- 黑龙江省边境旅游产业财务报表分析
- 依托“一带一路”战略加快黑龙江省沿边开放口岸跨境经济合作发展的研究
- 黑龙江省冰雪特色小镇的发展研究
- 食品市场生产者欺诈行为
- 公益性科研单位增加知识价值的分配政策研究
- 企业信用修复研究
- strong language
- strongly
- strongly/totally/wholeheartedly etc approve
- strong-minded
- subtranslucent
- subtransparently
- subtransparentness
- subtransparentnesses
- subtransverse
- subtransversely
- subtrapezoid
- subtrapezoidal
- subtread
- subtreads
- subtreasurer
- subtreasuries
- subtrench
- subtrenches
- subtrend
- subtrends
- subtriangular
- subtriangularities
- subtriangularity
- subtribal
- subtribes
- 默默地探索研究
- 默默地流泪
- 默默地琢磨构思诗文
- 默默地用眼神或行动表示情意的样子
- 默默地相送
- 默默地祝告
- 默默地若有所思的样子
- 默默地观察
- 默默地记住
- 默默思索
- 默默思考
- 默默悠悠
- 默默承受
- 默默无言
- 默默无语
- 默默无闻
- 默默无闻,不被人所知
- 默默无闻,自寻短见
- 默默无闻,虚度一生
- 默默考虑
- 黛
- 黛墨
- 黛尖
- 黛山
- 黛岑