宋玲玲 杨银刚
摘要:复杂系统控制过程往往需要人综合控制系统、仿真系统,以及人在回路综合实现。构建基于多agent机器人系统及其实现策略,是多机器人系统研究和解决现实问题的热点。本文基于多部件综合作业机器人项目,针对不同作业机器人,提出一种异构多Agent机器人系统控制方法,此方法引入ACP理论的思想,将平行控制方法应用于机器人综合作业平台,通过人工系统与实际系统的虚实互动,使电脑的计算能力与人脑的灵活能力有效结合,实现了一个复杂系统的合理管控,为多机器人协作完成实际复杂控制系统提供了一种保证系统可靠性基础上提高效率的可供借鉴的理论和实现方法。
关键词:平行控制系统;异构;多机器人系统;控制策略
中图分类号:TP 311 文献标识码:A DOI:10.3969/j.issn.1003-6970.2015.03.011
本文著录格式:宋玲玲,杨银刚,基于平行控制的异构多Agent机器人系统控制方法[J],软件,2015,36(3):52-58
0.引言
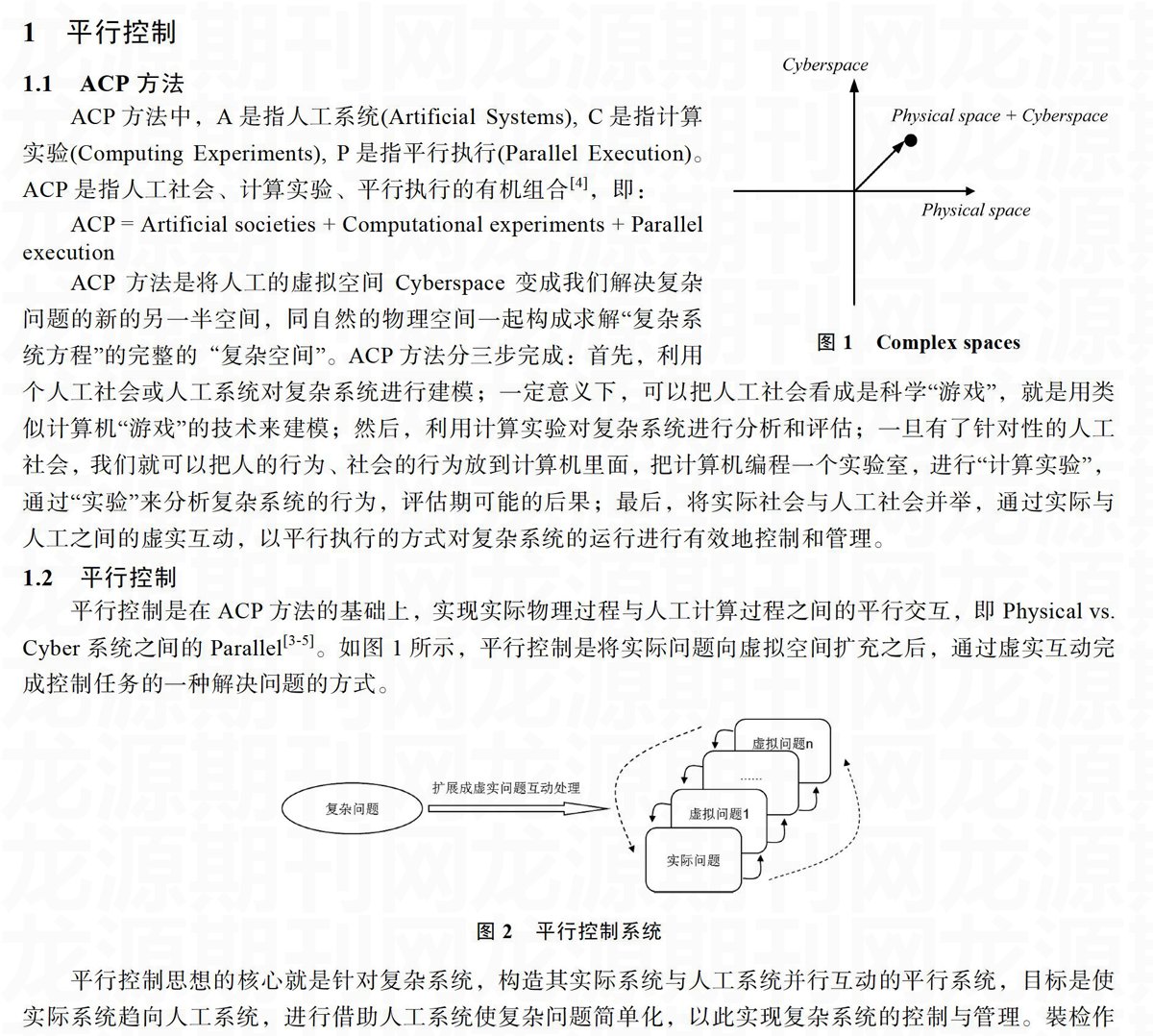
随着科技的极大进步,国际交流与竞争日益增强。基于经济发展和军事航天业的需要,国内外对机器人技术的研究越来越重视。美国、日本、韩国曾在机器人研究方面制定专门的研究计划。我国也在国家高技术研究发展计划、国家自然科学基金、国家科技重大专项等规划中对机器人技术研究给予了极大重视。机器人技术是未来高技术、新兴产业发展的基础之一,对于国民经济和国防建设具有重要意义。
装配和检测机器人系统是众多机器人研究方向的一支,也是工业机器人,用于工件拆装,包括物流、装配、测量、视觉检查、速度约束、碰撞检测等多个方面。不仅可应用于工业生产,服务于经济建设,随着技术的进步,机器人智能化、高精度、高速、网络化的特点将使其应用于日常生活,甚至航天、军事作业等领域。目前,工业机器人广泛应用于汽车工业的点焊、弧焊、喷漆、热处理、搬运、上下料、装配、检测等工业。在物流、码垛、食品和药品等领域,工业机器人也正逐步代替人工从事繁重枯燥的包装、码垛、搬运等作业。但往往仅限于单一的简单作业,而随着工业产品复杂性、精密性的提高,对生产过程也提出了更高要求。高效与成本使得装检作业机器人这种一体化,复杂控制的需求越来越突出。
不同的作业环境和需要,使得某些装检作业任务过程复杂,步骤繁琐,由单个机器人难以完成,必须借助多个各自具有一定智能的机器人协作实现,其中运用多Agent相互协调配合的思路构建系统是一种业界长期研究的热点。这种复杂任务作业机器人是由多个异构Agent组成的机器人系统,此系统要完成一整套的装配和检测作业任务,必然会遇到多Agent间的任务分配,相互协作机制的问题。在实际应用背景中,系统与其他具有较大灵活性与自由度的机器人(比如足球机器人)不同,该机器人系统需要完成超精密的(配合精度在10um级)作业需求,按照严格的操作规程完成特定的作业任务。需要极高的准确性、安全性,同时要保障一定的高效性。另外,这一复杂系统涉及到系统控制、计算机、仿真、人工智能等学科知识,难以用单一的控制软件来全面刻画与实现。目前的多Agent系统大都是控制系统与仿真系统分离,本文在多Agent系统中引入平行控制的思想,将实际作业系统与人工系统融合,通过实际与人工之间的虚实互动,以平行执行的方式对装检系统的运行进行有效地控制和管理。
- 初中英语课堂情境教学的实践与思考
- 关注课堂教学改革提炼英语教学经验
- “五方法”提高数学教学的有效性
- 几何直观:学习数学的脚手架
- 对阅读与写作有机结合的再认识
- 内容与形式:学生的写作之“道”
- 浅谈文言文记忆三部曲
- 让学生在对话中体验语文阅读
- 管中窥豹 可见一斑
- 数学课堂应创设探索性挑战性问题
- 数学课堂培养学生思考力探究
- 贵州省习水县教育局提升资助政策透明度
- 四川省中江县62个学校法律援助工作站挂牌
- 宁夏银川市金凤区顺利通过全国义务教育发展基本均衡县检查验收
- 辽宁省盘锦市国家教育体制改革试点项目取得成效
- 本然语文:回归语文学科的本然
- 以学为主应成为化学课堂教学的主旋律
- 抓好均衡发展 促进教育公平
- 转型文化:区域中小学提升的软实力
- 学校层面课程整合的误区与出路
- 修良习铸美德 奠基成功人生
- 师生真诚交流 互动效果良好
- 小学音乐教学中多元化体验策略的运用
- 核心价值观教育策略与实践浅探
- 以摄影校本课程为载体开展责任教育
- unsweepable
- unswell
- unswelled
- unswelling
- unswerved
- unswerving
- unswervingly
- unswervingness
- unswervingnesses
- unswilled
- unswinging
- unswitchable
- unswitched
- unswivel
- unswiveled
- unswiveling
- unswivelled
- unswivelling
- unswivels
- unswollen
- unswung
- unsyllabic
- unsyllabled
- unsymbolic
- unsymbolical
- 斋浴
- 斋熏
- 斋生
- 斋祀用的厨房
- 斋祀的庐舍
- 斋祈
- 斋祓
- 斋祠
- 斋祭
- 斋祭的场院
- 斋祷
- 斋禁
- 斋科
- 斋筵
- 斋粮
- 斋糜
- 斋素
- 斋肃
- 斋臧
- 斋舍
- 斋舍的屏风
- 斋舍的座位
- 斋船
- 斋虑
- 斋衣