韩伟莉 李炬
摘要:针对当前城市道路交通拥堵等问题,如何加强对交通的优化控制,是本文探讨的重点。本文以交叉路口信号控制作为研究对象,提出一种模糊控制的交通信号优化方法。即以邻交叉口进口道的繁忙度、绿灯相位繁忙度、红灯相位紧急度作为输入,通过模糊推理实现交通信号等的相位转换,进而实现对该区域整体交通的优化。
Abstract: In view of the current urban road traffic congestion and other issues, how to strengthen the optimal control of traffic is the focus of this paper. In this paper, the intersection signal control is taken as the research object, and a fuzzy control traffic signal optimization method is proposed. That is to say, the busyness of the entrance of the adjacent intersection, the busyness of the green light phase and the urgency of the red light phase are taken as input, and the phase conversion of the traffic signal is realized by fuzzy reasoning, thereby realizing the optimization of the overall traffic of the area.
关键词:交叉路口;信号控制;模糊算法
Key words: intersection;signal control;fuzzy algorithm
中圖分类号:U491.5+1? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文献标识码:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章编号:1006-4311(2019)18-0234-03
0? 引言
当前随着我国城市车辆的大量增加,城市交通的智能化管理成为解决城市拥堵的一个重要途径和方式。特别是在城市高峰期,在一些路段出现严重拥堵,甚至瘫痪的现象,这些严重制约着我国城市的高质量发展。同时在城市交通中,十字路口多,红绿灯自然也多。因此,加强对这些十字路口红绿灯信号的管控,对减少城市拥堵具有非常重要的作用和意义。目前,城市交通信号的控制主要还是固定配时控制,换句话说就是以历史车流量大小来对通行时间进行分配。但是这种方法存在灵活性差,并且不能根据路况进行动态调节,所以在一定程度上造成了城市道路资源的浪费。同时,城市道路交通控制中,被人们认为是一个非线性、时变的系统,很难通过精确的控制模型进行控制。因此,人们引入模糊控制方法在城市道路交通信号中。但是模糊控制在应用中自身也存在问题,如车道数量和通行相位数目增加,公交车道的划定等,都给城市交通控制带来很多的不可确定性。另外,在实际的交通运行中,存在很多的异常情况,如交通事故等。但传统的模糊控制没有考虑这类异常情况,所以,本文在上述的基础上,提出一种改善的方法,并对该方法的效果进行验证。
1? 模糊控制原理
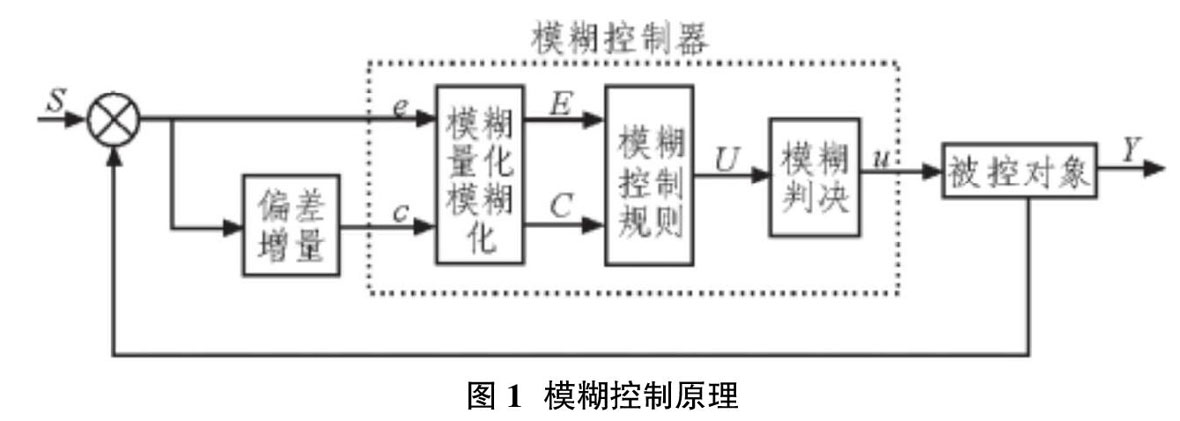
模糊控制的思想是把特定被控对象或者是某个过程按照IF或者是THEN的规则形式,按照模糊推理的方式进行控制。控制作用集为一组被量化的模糊语句,如“高”、“低”、“正常”等。在模糊控制中,包含控制器、反馈信号、对象等。具体控制过程如图1所示。
在图1中,S为设定值,e、c表示系统偏差和偏差变化率,E、C为经过模糊量化后的系统偏差和偏差变化率;U为经模糊推理后得到的控制作用。
2? 模糊控制器设计
2.1 区域交叉路口建模与控制思想
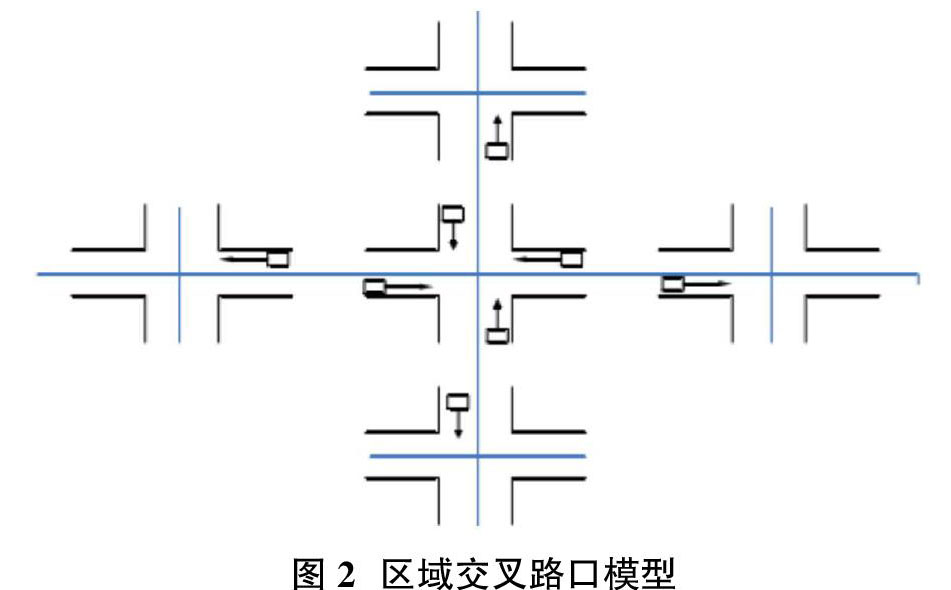
传统的模糊控制是针对单交叉口的,但是实际运行中,城市运行大部分是以多交叉口为主。其中,区域交叉口路模型如图2所示。
要实现对区域交叉路口交通信号的控制,需要结合图1的区域交叉路口模型进行控制。而根据图2看出,路口分为东、南、西、北四个不同的方向。在这四个方向中,都是按照直行车道和左转车道进行设计。在每条车道的进车口位置都设置车辆检测器,以此来获取车辆的信息。同时,在每一条车道中,设置一模糊控制器,从而输出当前相位车辆的紧迫度。通过测量,得到当前交叉口放行相位车辆的紧迫度、当前交叉口红灯相位车辆的紧迫度、当前交叉口放行相位的下一个相邻交叉口进口道上的车辆紧迫度。同时,通过路口车辆检测器,可对车辆的速度进行测量。由此,通过上述的综合信息,来判断整体交通状态。同时通过车辆检测器检测到的交通情况和控制器输出的车辆紧迫度,度整体控制决策进行设计。而该决策控制模块则决定是否进行相位转换,也就是否决定红绿灯信号是否切换。
2.2 模糊控制整体步骤
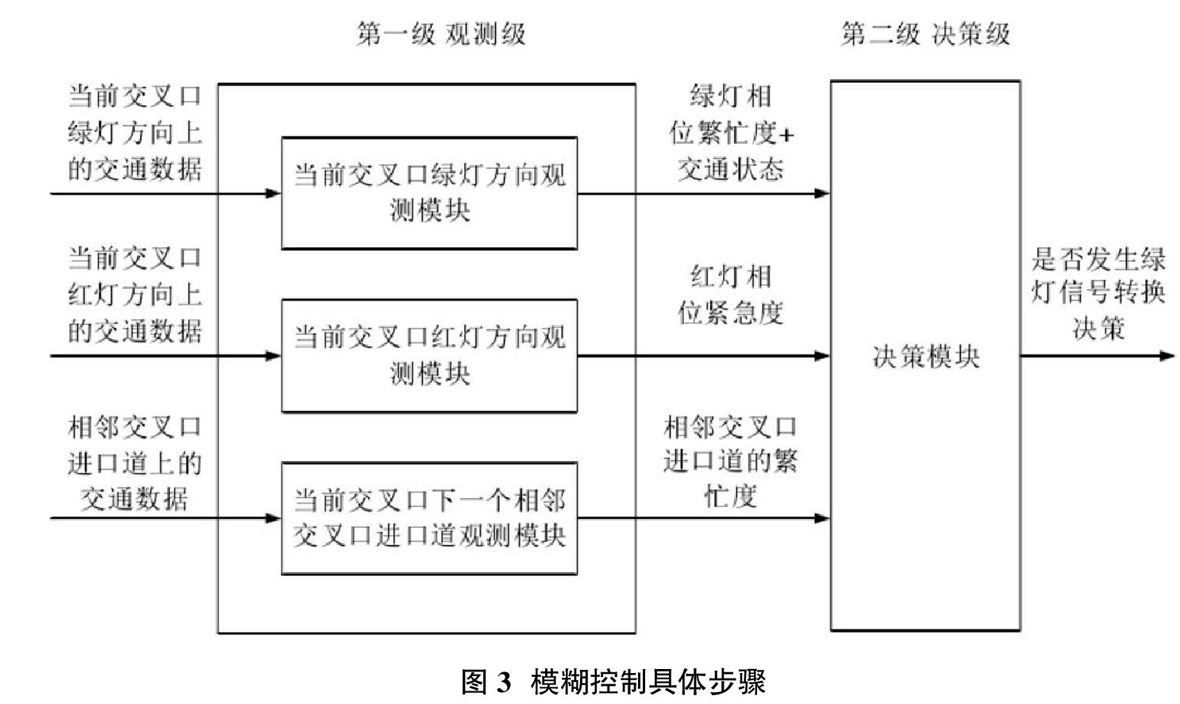
结合以上的思路,本文将整体的模糊控制思路设计为如图3所示。即以道路采集到的相位紧迫度作为输入,首先通过模糊控制的方法对交通数据进行初步采集和判断,进而得到相邻交叉口进口道的繁忙度、绿灯相位繁忙度+交通状态、红灯相位紧急度,然后在通过决策控制器模块对该区域进行综合判断,进而调整交通信号。
在图3中,绿灯相位繁忙度(Bu)是由绿灯相位的车辆排队数BL和绿灯相位的车辆到达率BAR决定的。
BL=BL0+CB
其中,BL0、CB分别表示上一次绿灯结束时检测区内剩余的车辆数和红灯期间到达的车辆数。
红灯相位的紧急度用Ru表示,由红灯相位的车辆排队数RL和红灯相位的车辆到达率RAR决定。
RL=RL0+CR
其中,RL0、CR分别为上一次绿灯结束时检测区内剩余的车辆数、红灯期间到达的车辆数。
相邻交叉口进口道的繁忙度Nu同样由NL和NAR共同决定。
NL=NL0+CN
另外,考虑到交通中可能存在异常行为,如交通事故、临时交通管制等,提出绿灯平均释放时间,即AGDT,以判断在非正常情况下的红绿灯的分配时间。具体计算为:
AGDT(n)=α(CDT)+(1-α)AGDT(n-1)
其中,CDT表示車辆进入交叉口的绿灯释放时间,AGDT(n-1)表示前平均绿灯释放时间。
2.3 模糊控制规则设计
要实现对上述的模糊控制,就需要结合图2中采集到的相邻交叉口进口道的繁忙度、绿灯相位繁忙度、红灯相位紧急度,以及本文提出的AGDT作为输入参数,通过一定的模糊转换,进而得到输出量,即相位转换决策信号JC。其中,JC的论域为{0,1},模糊化后,则为{转,不转},用{JC1,JC2}表示;隶属度函数采用三角型隶属度函数;Bu、Ru、Nu的论域为{0,1,2,3,4},模糊化处理后为{VD(较低),D(低),M(一般),H(高),VH(较高)}。同时考虑到本文引入的AGDT参数,分别设定在正常情况下和非正常情况下的控制规则,具体见表1和表2所示。
3? 仿真验证
3.1 仿真建模
利用visio studio2012作为开发平台,以VB作为开发语言,对以上算法进行编程,从而得到如图4所示的交叉路口仿真模型。
3.2 仿真流程设计
根据上述的设计,将算法步骤描述如下:
Step1:初始化各参数,包括最大、最小绿灯时间,并从道路的任意相位开始;
Step2:检测各个相位的车辆达到率和排队数;
Step3:模糊控制器根据上述检测得到的排队数和车辆到达率,计算不同相位的相邻交叉口进口道的繁忙度、绿灯相位繁忙度+交通状态、红灯相位紧急度,并计算AGDT;
Step4:将上述采集到的不同相位数据作为输入,然后根据模糊推理,决定是否进行相位转换;
Step5:若进行转换相位,则转到Step2;
Step6:若不进行相位转换,则直接判断绿灯相位通行时间是否最大,如最大,则转换到紧迫度最大的下一相位,转到Step2。如未达到最大,则就放行绿灯相位的车辆;
Step7:判断仿真时间是否超时。如否,转到Step2;如是,则计算车辆的平均延误率,结束仿真。
3.3 参数设置
设定在异常情况下东西方向路况出现拥堵,南北方向行驶正常。车辆在交叉路口采用随机分布,包括小轿车、公交车等不同车型。仿真时间50min。同时为对比本方法的效果,采用定时信号变化进行对比。定时控制下红绿灯时间都设定为60s,本文采用方法的红绿灯时间则根据上述的规则来定。由此通过上述的仿真,得到表3的对比结果。
通过上述的结果看出,本文构建的模糊控制算法在车辆平均等待时间上,要明显少于定时控制方法,说明本文构建的方法与定时控制方法相比,具有一定的实用价值,对提高车辆通信的时间,具有很大的价值。
4? 结束语
通过对异常情况下区域交叉口交通信号控制的研究,考虑了相邻交叉口的交通流信息,因此更有利于从整体区域的角度对交通进行控制。同时,通过仿真结果表明,本文采用的模糊控制方法在等待时间上,要明显低于传统的定时时间,说明本文方法的实用性和价值。
参考文献:
[1]伍尚昆,陈翠宜,祝胜林.基于多种群蚁群算法的交叉路口信号配时优化[J].计算机应用与软件,2014(3105):83-88.
[2]曹成涛.城市交叉口交通信号优化控制方法[J].西安工程大学学报,2016,30(14105):616-621.
[3]张晓.城市交叉路口单点信号优化控制配时策略研究[J].城市建设理论研究(电子版),2017(22313):60-61.
[4]王舒祺.现代有轨电车交叉路口优先控制管理方法研究综述[J].城市轨道交通研究,2014,17(14106):17-22.
[5]景顺利,王恒.有轨电车信号系统中的交通信号控制及显示系统研究[J].现代城市轨道交通,2018(07):1-4.
[6]李佳澎.基于Petri网的无信号交叉口车辆诱导及优化系统研究[J].软件导刊,2018,17(19008):21-27.
[7]吴黎兵,聂雷,刘冰艺,吴妮,邹逸飞,叶璐瑶.一种VANET环境下的智能交通信号控制方法[J].计算机学报,2016,39(40206):1105-1119.
[8]黄攀,闫艳.不同交叉路口青年人过街特性的研究[J].农业装备与车辆工程,2017,55(31207):78-81.
[9]郭新兰,李涛.分布式区域交通信号自适应控制[J].自动化应用,2013,10:16-18,39.
- 中澳合作TAFE教育人才培养中的学用脱节问题与对策
- 基于信息化路径的职教精准扶贫内涵与策略
- “放管服”改革背景下职业院校“双高”建设路径
- 论通过“非遗”社团培育大学生社会主义核心价值观
- 新媒体环境下大学生思想政治教育面临的挑战及对策
- 高职思想政治理论课信息化教学的困境与出路
- 微时代大学生心理健康教育创新路径探析
- 当代大学生文化自信培育研究
- 宁波市高职院校专业设置与区域经济发展的适应性研究
- “246”产业发展背景下宁波市基层工信管理队伍建设的思考
- 应用视域下的自学考试汉语言文学专业课程设置研究
- 高职院校“中华文化原典”育人模式的构建
- “互联网+”背景下高职院校全员育人机制创新
- 高职旅游类专业“双导师制”人才培养模式创新
- 广告语言的修辞特色及其效果
- 微信朋友圈青年晒客心理与行为探析
- 从《清俗纪闻》饮食部分诠释东南沿海社会形态
- 21世纪金华女作家比较研究
- 页岩脱气实验下含气性变化特征研究
- 石油管水压机监控管理系统的研究
- 基于J2EE在线购物系统的设计与实现
- 共建共享视野下杭州中小型茶馆服务质量评价研究
- 南通健康服务业发展对策初探
- 农业高职院校创新创业教育评价体系构建研究
- 双视角下高职院校创新创业教育的思考
- self-inflation
- self-inflations
- self-inflicted
- self inflicted
- self-infliction
- self-inflictions
- selfing
- self-initiative
- self-initiatives
- self-injuries
- self-inoculated
- self-inspected
- self-inspection
- self-inspections
- self-instructing
- self-instructions
- self-instructor
- self-instructors
- self-insure
- self-integrating
- self-integration
- self-integrations
- self-intelligible
- self-intensified
- self-intensifying
- 琼姬
- 琼姿
- 琼姿玉貌
- 琼娥
- 琼宇
- 琼实
- 琼室
- 琼宫琼瑶
- 琼宴
- 琼尺
- 琼屑
- 琼山
- 琼岛
- 琼峰
- 琼崖
- 琼巘
- 琼州海峡
- 琼巵
- 琼府金穴
- 琼座之芬敷
- 琼彩
- 琼怀
- 琼思
- 琼户
- 琼报