袁炜 张宝 吴饶 薛永航 郝健


摘要:为了实现步进电机进行启停、正反转、加减速的控制。本设计以AT89C52单片机为控制器,设计了一种步进电机的控制系统。整体设计主要包括:驱动电路、液晶显示模块、物理按键、系统的编程调试。根据功能要求,编写程序,进行了仿真,结果显示,该系统能够很好地控制电机启停、正反转、加速和减速,具有一定的实际应用价值。
关键词:AT89C52;驱动电路;步进电机;仿真
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2020)18-0214-03
开放科学(资源服务)标识码(OSID):
步进电机是将电脉冲信号转换成角位移或线位移的调制电机,非常适合单片机控制[1]。广泛应用于生活的各个领域,步进电机的速度调节是其应用的关键所在。然而,传统电机调速是运用逻辑电路来完成的,调速复杂,昂贵耗时,可应用范围小。故基于单片机的步进电机控制系统,利用软件程序控制步进电机,调速简单,低价高效,应用广泛,同时改变程序而改变控制方案,在一定的工业和生活场合均具有实用性价值。本系统实现的具体功能如下:控制电机正反停,实现电机转速调节,至少实现三级调速功能[2]。
1 控制系统设计方案
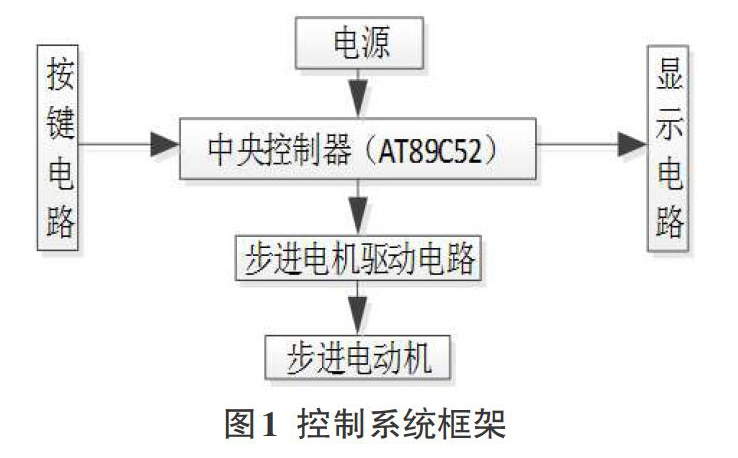
基于AT89C52单片机控制系统方案中,通过硬件法和软件法分配脉冲信号达到控制电机的通电换相变换控制[3]。接收脉冲信号后,步进电机按照原定方向以固定的角度转动。在按键复位和时鐘电路中增加系统的交汇性,使其与外围电路有机结合。通过液晶显示将步进电机转速等情况实时显示,同时,根据实际工程的需要,增加的键盘来满足电机的启停、正反转和调速等其他功能。在软件方面,依赖延时程序来控制,利用C语言编程调控脉冲的分配以及脉冲的上升沿与下降沿的通断时间,完成对步进电动机的控制。使用编程语言,提高了电机控制的准确性和有效性,避免了系统震荡和失步[4]。图1为设计控制系统的框架。
2 硬件电路设计
2.1 系统总体电路图
步进电机控制系统主要以AT89C52单片机为CPU、配合驱动电路、电源以及时钟电路等几部分。总体硬件电路如图2所示。
2.2 驱动电路设计
采用L298N芯片对步进电动机进行驱动。L298N可提供高达2A输出电流,工作电压范围宽,而且电路简单,使用比较方便。逻辑控制部分均采用5v直流电压,通过控制逻辑部分电平的高低,改变驱动电路提供给电机的电压的大小和极性,从而改变电机的工作状态和转速[5]。本次设计硬件电路部分的驱动电路如图3所示,步进电机如图4所示。
2.3 液晶显示模块设计
液晶显示模块使用LM016L,它是一种用来显示字母、数字、符号等点阵型液晶模块,具有简单而功能较强的指令集,可以实现字符移动,闪烁等功能。将此模块与单片机的外接引脚接口经排阻连接[6]。如图5所示,为此液晶模块与单片机的连接电路图。
2.4 物理按键电路设计
针对电机的启停、正反转、速度上升和速度下降共设计了6个物理按键,按键与AT89C52单片机引脚接口采取上拉阻排的结构来避免因误操作造成外电路和单片机损坏,最终通过软件编程来达到控制步进电动机的六种情况[7]。
3 软件程序设计
3.1 系统主程序设计
根据设计要求,将该系统的软件编程部分设计共包括以下几个部分:AT98C52单片机运行主程序设计;物理按键扫描与中断控制程序设计;液晶显示模块初始化程序设计;液晶显示模块显示步进电动机状态程序设计。
3.2 AT98C52单片机运行主程序设计
该部分主要任务是对单片机端口的设置、函数的定义并对一些管脚进行定义以及设置液晶显示模块的初始显示值和字符等[8]。
系统工作主体框图如图6所示:
3.3 按键扫描与中断控制程序设计
设计的6个独立物理按键,分别对应电机的启停、正反转、加速和减速六种动作状态进行控制[9]。如图7所示,为按键控制流程图。
4 仿真及实现
采用Proteus软件对设计的系统进行仿真[10],仿真效果完全符合要求,下面是电机启动、电机反转及电机加速等部分仿真结果。
4.1电机启动仿真
按下“FOREWARD”按钮,选择电机转动模式为正转,按下“SPEEDUP”按钮,选择速度,按下“STAR”按钮,启动电机,图8为电机正转启动仿真图。
4.2 电机反转仿真
按下“REVERSAL”按钮,选择电机转动模式为反转,按下“SPEEDUP”按钮,选择速度,按下“STAR”按钮,图9为电机的反转仿真图。
4.3 电机加速仿真
电机正常运行状态下,按下“SPDDEUP”按钮,实现电机转速增加。图10为电机加速仿真图。
5 总结
基于单片机的步进电机控制系统设计,通过软硬件配合实现了步进电机的启停、正反转、加减速的控制,增强了对AT89C52单片机的理解和使用能力,掌握了驱动电路、显示电路、案件电路的使用方法。另外,提升了程序编写能力。该设计源于生活,应用广泛,具有较强实际参考价值。
参考文献:
[1]牛慧佳.基于单片机的步进电机控制系统设计研究[J].数字技术与应用,201 8,36(7):11-12.
[2]田聪,苏畅,基于51单片机的步进电机控制系统设计与实现[J].电子测试,2017(22):5-6,19.
[3]曹曼罡.基于单片机的步进电机控制系统的研究[J].数字技术与应用,2017(6):20,22.
[4]张秀辉,苏娱,基于单片机的步进电机控制系统研究[J].电脑知识与技术,2016,12(12):279-280,286.
[5]杨永清,基于STM32和FPGA的多通道步进电机控制系统设计[D].成都:西南交通大学,2017.
[6]刘维澄,张吟蓉,何湘吉,步进驱动器的比较和改进[J].电工电能新技术,1987,6(4):32-37.
[7]付艺豪,许建明,李忠.基于单片机的步进电机系统设计[J].电子世界,2016(4):149-150.
[8]韩亮.异步电机的闭环定位控制系统设计[J].常州工学院学报,2016,29(3):22-26.
[9]刘宝志.步进电机的精确控制方法研究[D].济南:山东大学,2010.
[10]坂本正文,步进电机应用技术[M].王自强,译,北京:科学出版社,2010.
【通联编辑:唐一东】
基金项目:淮南师范学院校级项目(2018xj30);淮南师范学院2018年“支持百名优秀学生课外科技实践创新活动基金”项目(2018XS146);淮南师范学院2019年省级大学生创新创业训练计划项目(201810381005)
作者简介:袁炜(1985-),男,安徽淮南人,助理实验师,硕士,研究方向:信息识别与处理,电气设备故障诊断与处理等。
- “认识小数”教学纪实与评析
- 以《电流的测量》一课为例谈物理课堂核心素养的落实
- 核心素养下的英语语法情境教学
- 初中音乐生活化教学的基本途径
- “自主+互助”式语文课堂教学模式的应用
- 习作《故事新编》教学设计
- 《海的女儿》教学设计
- 《巨人的花园》教学设计
- 《宝葫芦的秘密(节选)》教学设计
- 口语交际:自我介绍
- 《“诺曼底”号遇难记》教学设计
- 《文言文二则》教学设计
- 《古诗三首》教学设计
- 统编教科书小学语文四年级下册第七单元单元解读
- 立足校本创新机制促进青年教师成长
- 加快推进林区教育现代化
- 稳中有进稳中提质稳中增效全面提升教育教学质量
- 把英语课堂还给学生让孩子生动活泼地成长
- 在思考中探索于实践中创新
- 亦忧亦喜说手机
- 记忆·奶奶
- “钥匙”的启迪
- 说到就要做到
- 用心去爱 桃李自成
- 我们能拿到10分吗?
- intelligently
- intelligentsia
- intelligibilities
- intelligibility
- intelligibility,intelligibleness
- intelligible
- intelligiblenesses
- intelligibly
- intelˌlectual assets
- intelˌlectual capital
- intend
- intended
- intender
- intenders
- intending
- intend/not intend
- intends
- intend to do sth
- intense
- intensely
- intenseness
- intensenesses
- intenser
- intensest
- intensification
- 沦陷
- 沦陷、沦丧
- 沦隐
- 沦飘
- 沦鼎
- 沧
- 沧凉
- 沧州木板大鼓
- 沧州狮子景州塔, 真定府里大菩萨。
- 沧桑
- 沧桑之变
- 沧桑尘飞
- 沧桑换
- 沧桑陵谷
- 沧池
- 沧沧
- 沧洲
- 沧洲尘缶编
- 沧流
- 沧浪
- 沧浪叟
- 沧浪君
- 沧浪吟
- 沧浪子
- 沧浪客