摘 要: 针对基于三维扫描的商品过度包装智能检测系统中检测摄像机与被测物间三维轴线求解复杂的问题,提出一种在过度包装检测系统中检测摄像机与被测物间三维轴线求解方法。该方法利用棋盘格做标记板,在计算机上利用OpenCV对标记图像进行识别处理,利用三维重建原理对坐标进行二维到三维的变换和空间点重建,实现三维扫描下摄像机与被测物之间的三维轴线求解。在实验中,该方法测试数据达到该系统对精度的要求。所提方法中测量装置结构简单,在转换过程中不需要对标记进行边缘检测,减少了计算量,同时使测量效率得到提高,降低求解的复杂程度。
关键词: 过度包装检测; 标记板; 坐标转换; 角点识别
中图分类号: TN942.2?34 文献标识码: A 文章编号: 1004?373X(2015)18?0022?04
Abstract: Aiming at the complex problem of calculating three?dimensional axis between the detecting camera and the object under test in the commodity excessive packing intellectual detection system based on three?dimensional scanning, a new method is proposed to calculate three?dimensional axis between the detecting camera and the object under test. It takes checkerboard as marking plate, makes use of OpenCV to recognize and deal with the marking images, realizes coordinate conversion from 2D to 3D and spatial point reconstruction according to the principle of 3D reconstruction, and implements the calculation of 3D axis between the detecting camera and the object under test. The experiment results show that the structure of measuring device is simple, it is unnecessary to make edge detection for the marks in the process of transform. The method, which has less calculated amount and high measuring efficiency, can fulfill the precision demands of the system and reduce measuring complexity.
Keywords: excessive packaging detection; marking plate; coordinate conversion; corner recognition
0 引 言
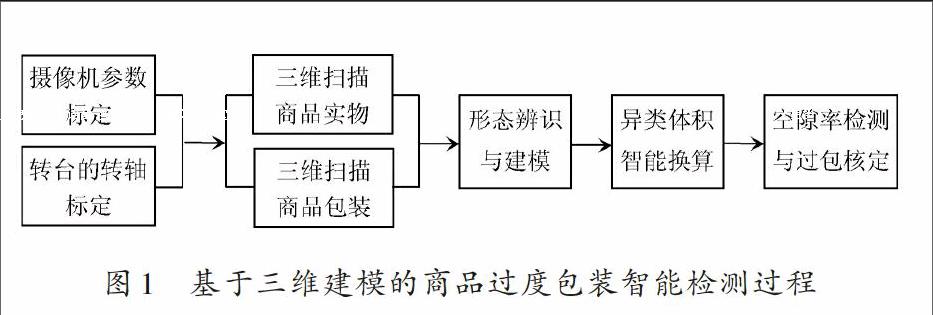
随着商品经济的发展,市场形成供大于求的局面,商品对包装促销作用的要求越来越高。因此,在产品的销售过程中经常会出现过度包装[1]的现象。按照市场规律分析,其产生的原因主要在于生产者、设计者、消费者、决策者4个方面。而在技术上对过度包装进行检测,便有了很大的需求。基于三维建模的商品过度包装智能检测过程包含前期的摄像机标定和转台标定、三维扫描、形态辨识与建模[2]、异类形体包装体积智能换算,以及包装空隙率运算与是否过度包装判定等基本环节,如图1所示。
对商品的三维数据采集需要从多个角度进行采集,并将这些从不同视角观察的三维数据通过对齐复位过程表示于同一坐标系中,对散乱点云进行配准[3]恢复其原有的位置关系。为此,在三维数据采集中摄像机与被测物间空间坐标的转换就成为该检测系统精确测量与判定的基础。
在单目视觉下或者是在双目视觉下进行物体三维信息的重建[4]工作时,都需要进行三维信息的还原,通常采用双目测量技术。双目测量技术是计算机视觉[5]检测技术的一个重要组成部分,利用2个摄像机模拟人眼的结构对空间特征点进行测量。为了保证被测物随转台旋转之后测量的准确性,需要对转台参数进行标定,找出旋转台的旋转轴线[6]。这其中就涉及到了转台参数计算这个重要环节。在数据采集过程中有被动式采集和主动式采集2种方法[7]。在三维重建中2种采集方式都可以使用[8],二者的区别在于,被动式没有受控的主动光源,无需复杂的设备,并且与人类的视觉习惯比较接近,其测量技术主要用于受环境约束不能使用激光或者特殊照明光的场合;主动式数据采集有受控光源,二者互有优劣。本文采用的是被动式采集,利用棋盘格做标记板,在计算机上对图像进行检测识别,将坐标进行变换和空间点重建,来实现双目视觉下摄像机与被测物之间三维轴线求解。
1 双目视觉下三维坐标转换原理
在需要进行轴线求解的领域中,现在一般有以下几种常见的方法:第1种是对于计算机视觉测量中轴线标定的方法主要标准平面或高精度半径已知的标准球[9]来实现。通过被标定的视觉测量设备首先从多个旋转位置获取标准平面或标准球的表面三维数据,然后根据三维点数据拟合出平面或球的表面方程,最后根据平面或标准球的几何特征求取出旋转台的旋转轴线位置。第2种方法是利用球形标靶[10],旋转若干个位置(至少3个)通过灰度值跳变像素粗略寻出标靶的边缘,然后根据边缘上相邻像素点之间的曲率变化对边缘进行筛选,得到准确地球形标靶边缘点,使用最小二乘法获取球形标靶的圆心,此后通过每个圆心三维点数据进行拟合平面进而求取轴线。
本文对上述方法进行了总结和分析,结合实际的项目,提出了利用棋盘格做标定板来进行轴线标定的方法。在此对该方法进行详细的介绍。
1.1 测量装置环境搭建
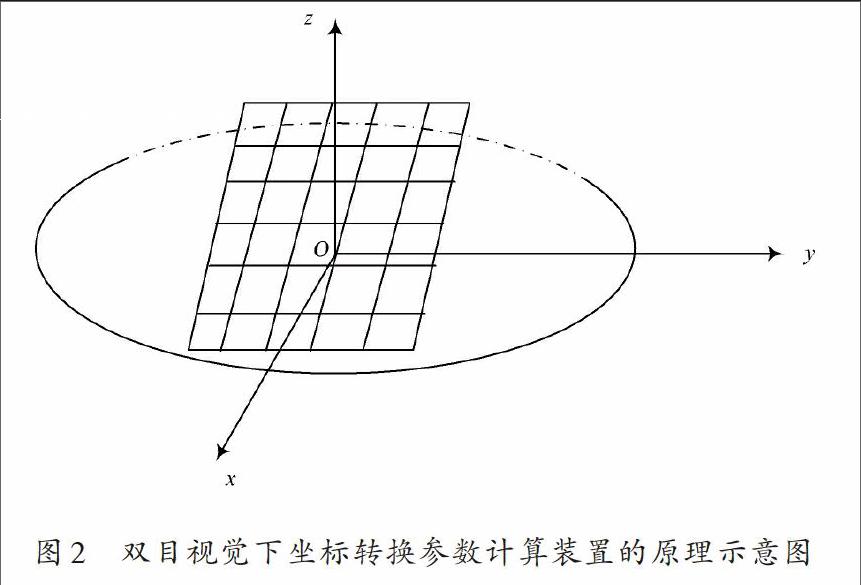
在双目视觉系统下,把转台置于2个摄像机的视场内,并且把用于摄像机标定的棋盘格置于转台上,其位置没有特殊要求,最好是平放在转台上或与转台成一定角度,方便转台在旋转更大角度时,摄像机可以检测棋盘格上角点,此装置用棋盘格代替传统的标记圆和标记球。双目视觉轴线标定的原理示意图如图2所示。
图2中棋盘格摆放位置并不固定,摆放的标准就是需要让棋盘格整体处于双目摄像机的视场范围内,可以检测出棋盘格的角点即可,所以摆放位置取决于摄像机与旋转台的相对位置。
1.2 对标记点的检测
之所以选择棋盘格,是因为在进行摄像机标定时发现摄像机可以很好地识别棋盘格的角点,通过OpenCV或者Matlab中的识别程序[11]对角点进行检测。通过程序可以得到角点的二维像素坐标和转换所需要的摄像机内外参数矩阵,相较传统的标记圆和标记球而言,简化了工序和计算质心的步骤。选择标记点的时候尽量选择远离圆心的某点,这样可以大大减少计算误差。转动圆盘,至少旋转三个角度分别记录下所选择标记点在左摄像头和右摄像头下的坐标,分别记作[Ql1],[Ql2],[Ql3]和[Qr1],[Qr2],[Qr3],其中[Ql1]和[Qr1],[Ql2]和[Qr2],[Ql3]和[Qr3]是空间中同一点在左右摄像机里对应的点。
1.3 对标记点的坐标转换
以上3点分别是在左右摄像机下的坐标,通过几何关系,空间点在左右摄像机下对应的坐标可以惟一确定这个空间点。
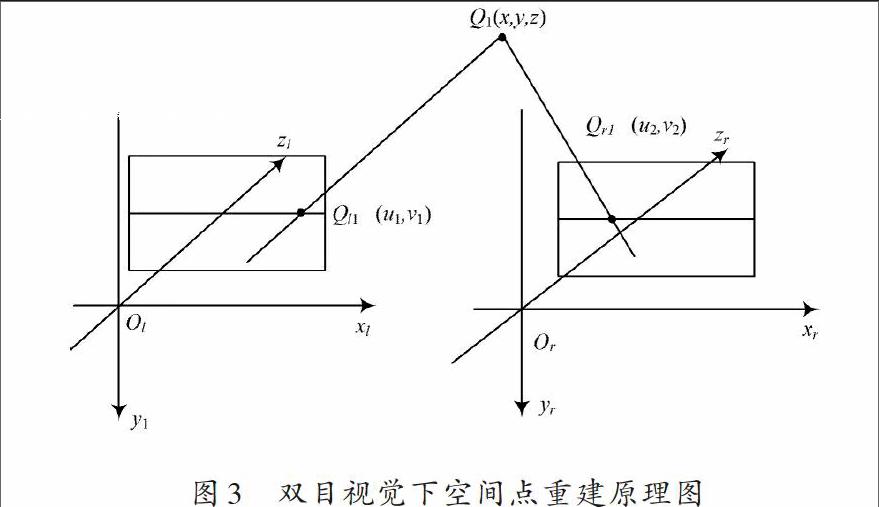
对这3点的空间三维坐标进行求解,来确定这3点在空间中的确定位置。如图3所示,[Ql1]与[Qr1]是空间点[Q1]在左摄像机与右摄像机中分别对应的点,依据三角几何的变换关系可以通过左右摄像机对应的2点惟一确定空间中点[Q1]。
利用计算机视觉将坐标点进行转换,已经分别检测出[Q1]在左摄像机下的坐标,在右摄像机下的坐标为,假定摄像机已经标定,通过标定程序可以得到摄像机的内外参数矩阵,进而很容易得到投影矩阵[12],分别记作[M1]与[M2]:
1.4 求轴线的方向
在求得转台上3点的三维坐标后,将旋转轴与旋转平面的几何关系转换为向量之间的运算关系,可求得轴线的方向。首先,已知轴线与转台平面,也就是[Q1(x1,y1,z1)],所在平面垂直,即轴线是这个平面的法向,根据这个关系,得出轴线向量与平面上的任意向量垂直,于是在平面上任取2个向量[Q1Q2],[Q2Q3],得式(4):
1.5 求旋转轴线上的一点坐标
在选择旋转轴线上某点坐标时,选择点的原则是计算方便,易于寻找。所以选择旋转轴与标记点所形成的平面的交点,即标记点所在圆的圆心。假设圆心坐标为[O(x,y,z)],求圆心需要有几个关系,利用圆的性质,圆上任意两点的连线的垂直平分线必过圆心,依然取[Q1Q2],此外还可以得出圆上一点与圆心的连线[Q1O]与平面法向量垂直,通过三个垂直关系得:
从上面的步骤可以简单地得出该方法求轴线的一般过程,将轴线标定的装置搭建好之后,对坐标点进行检测和空间转换,使得求解所需要的数据在同一个空间坐标系下。然后通过上述的方法求解轴线的方向,为了计算简单,选取轴线与旋转平面的交点作为该向量上需要求的一点。这样便可以得到确定轴线的所有数据,即轴线的方向和该旋转轴上的一点。
2 实验结果与误差分析
正文内容双目视觉下的轴线标定采用2个CCD摄像机,将其分别固定在水平臂的两端,在2个摄像机的重合视场内,放置由步进电机和步进电机驱动器组成的旋转台。为了对进行物体精确的三维重建,利用上述原理对旋转轴进行标定,旋转轴线的标定精度很大程度上决定了物体三维重建的误差大小。
在本实验中选择棋盘格作为标定板,放置在转台上,将双目摄像机固定,可以在很大一个转角内进行测量,距离近时可以进行360°无死角测量,进行实验时需要选择多个角点用于标定,这样做是为了消除数据的噪声影响。
对于一组数据,倘若标准差或者方差越小说明其数据波动越小,也就意味着标定的精度越高。表1的数据是进行了6次实验得出的结果,可以看到标准差接近于0,说明实验数据比较稳定,精确度较高。
双目视觉下轴线标定的误差来源主要有对棋盘格角点的识别误差和转台转动的精度误差,对于第1种误差,不需要转台的测量每个点的旋转度数,所以这种误差的主要来源是二维图像中角点的位置的识别误差。采用的识别程序标定对角点的识别误差平均值是0.44个像素点,为了提高角点的检测精度,和轴线的测量精度,可以采用一次测量多个点(大于3个)求解超定方程,和多此求解轴线矢量和标记点所在圆的圆心,进而进行数据拟合。对于第2种误差来源,完全决定于旋转平台的平整度以及精密程度。
3 结 语
本文基于过度包装智能检测项目,提出了在过度包装检测系统下一种检测摄像机与被测物间三维轴线求解方法,对现有的标定技术进行了一定的革新和优化。该方法不需要特殊的标定板,简化了测量装置。经过试验数据分析,精确度较高,可以将噪声对数据和整个标定结果的影响降低很多,具有较好的鲁棒性。在坐标转换时不需要额外的操作和工序,简化了转换步骤。该方法具有较好的通用性,可以在其他应用中使用。
参考文献
[1] HAI R H, CHI Y J. Modifying soy protein isolate by microwave?assisted phosphorylation to improve emulsification properties [J]. Journal of the Chinese Cereals and Oils Association, 2009, 24(6): 40?42.
[2] 张梅,文静华,张祖勋,等.基于特征关系图的似二次曲面物体三维几何建模[J].光电子·激光,2010,21(8):1252?1256.
[3] 张旭东,吴国松,胡良梅,等.基于TOF三维相机相邻散乱点云配准技术研究[J].机械工程学报,2013,49(12):8?23.
[4] LI X S, QIN K Y, YAO P, et al. 3D Reconstruction of space based on binocular vision [C]// Proceedings of the 6th International Symposium on Precision Mechanical Measurements. [S.l.]: SPIE, 2014: 1861?1865.
[5] 马颂德,张正友.计算机视觉:计算理论与算法基础[M].北京:科学出版社,1998.
[6] PANG F, LAU H, SONG H, et al. A tool?free calibration method for turntable?based 3d scanning systems [J]. IEEE Computer Graphics & Applications, 2014, 1(1): 10?11.
[7] HERN C, ?NDEZ C, ESTEBAN E, SCHMITT F. Silhouette and stereo fusion for 3D object modeling [J]. Computer Vision and Image Understanding, 2004, 96(3): 367?392.
[8] FANG W, HE B W. Automatic view planning for 3D reconstruction and occlusion handling based on the integration of active and passive vision [C]// Proceedings of the 2012 IEEE International Symposium on Industrial Electronics. Hangzhou, China: IEEE, 2012: 1116?1121.
[9] 胡民政,习俊通.面向结构光三维测量的两轴转台标定[J].上海交通大学学报,2010,44(4):506?511.
[10] 王鹏,孙长库.双目视觉转轴标定方法:中国, CN101216296A[P].2008?07?09.
[11] ZHANG Z Y. A flexible new technique for camera calibration [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 93?98.
[12] 陈洪磊,贺建峰,刘俊.基于二维检索的投影矩阵算法[J].计算机工程,2013,39(2):229?232.
- 快速康复外科理念在普外科围手术期护理中的应用
- 主动脉球囊反搏术治疗急性心肌梗死伴发心源性休克的护理体会
- 泌尿外科留置尿管患者预防尿路感染的护理效果
- 针对性护理在小儿腹泻患者病症缓解率及并发症发生率的影响
- 新生儿重症监护病房内新生儿感染护理措施分析
- 骨科护理中舒适护理的应用分析
- 助产护理干预对高龄产妇分娩方式及产程的影响
- 低体质量法洛四联症患儿57例术后护理探析
- 探讨对疝气手术患者提供优质护理干预措施的影响
- 研究健康宣教在过敏性紫癜护理中的效果
- 人文关怀护理对产后抑郁症患者的临床效果观察
- 宫颈癌护理及心理护理在宫颈癌治疗中的作用及应用
- 系统护理干预对慢性胃炎及胃溃疡患者疗效、不良心理及生活质量的影响分析
- 情志护理对老年脑卒中恢复期患者负性情绪及生活质量的影响
- 偏头痛的中医内科治疗效果分析
- 中医针灸治疗颈椎小关节错缝的临床有效性观察
- 炙甘草汤联合生脉饮治疗老年冠心病心律不齐的临床效果
- 高等中医药院校教学成本有效控制研究
- 中医真武汤加减疗法治疗心肾阳虚型慢性心衰患者的临床疗效观察
- 中医辩证治疗中风偏瘫患者的临床疗效分析
- 清热利湿,凉血护阴法治疗银屑病四则
- 中医辨证治疗皮肤病的临床总结
- 中药临床合理用药安全性分析与对策研究
- 结核感染T淋巴细胞斑点试验对不明原因发热患者结核的诊断
- 脑梗塞后遗症药物治疗的有效方法及效果分析
- forthcomings
- for-the-best
- for-the-birds
- for-the-hell-of-it
- for the hell of it
- for-their-part
- for-the-life-of-one
- for the longest time
- for-the-love-of
- for-the-matter-of-that
- for the moment
- for-the-most-part
- for the most part
- for the present
- for the time being
- forthright
- forthrightly
- forthrightness
- forthrightnesses
- forthrights
- forthwith
- fortier
- forties
- fortiest
- fortieth
- 分浊
- 分润
- 分清
- 分清物类
- 分清理白
- 分清白
- 分源豕韦
- 分灶
- 分炎
- 分烟析产
- 分烟析生
- 分熟
- 分爨
- 分片
- 分片包干
- 分班序齿
- 分理别异
- 分瓜
- 分甘
- 分甘共苦
- 分甘味与人,以示慈爱
- 分电盘
- 分画
- 分界
- 分界牌