戴彦 吕宏丽

摘 要:为了解决四轮独立驱动轮毂电动汽车的汽车转向稳定性问题,提出基于滑移率的电子差速控制方法。首先,为了得到最佳滑移率,建立了三自由度的汽车模型。以最小滑移率为控制目的,通过控制左右车轮的相对滑移率,实现基于滑移率的电动汽车电子差速控制方法。仿真结果表明,该方法提高了电动汽车的转向穩定性。
关键词:滑移率;电子差速;稳定性
中图分类号:TB ? ? 文献标识码:A ? ? ?doi:10.19311/j.cnki.1672-3198.2019.23.111
1 引言
由于环境与资源问题日益严重,新能源汽车是现代汽车工业的主要发展方向之一。由于电动汽车的动力性与稳定性较好,在生活中应用越来越广泛。独立驱动轮毂电动汽车是指每个车轮有一个独立电机驱动,如何在转弯时有效控制车轮稳定性,是独立驱动轮毂电动汽车的研究重点之一。由于轮胎的非线性对滑移率有严重的影响,因此解决该问题是电子差速控制中的一个重要问题。
2 车辆动力学方程
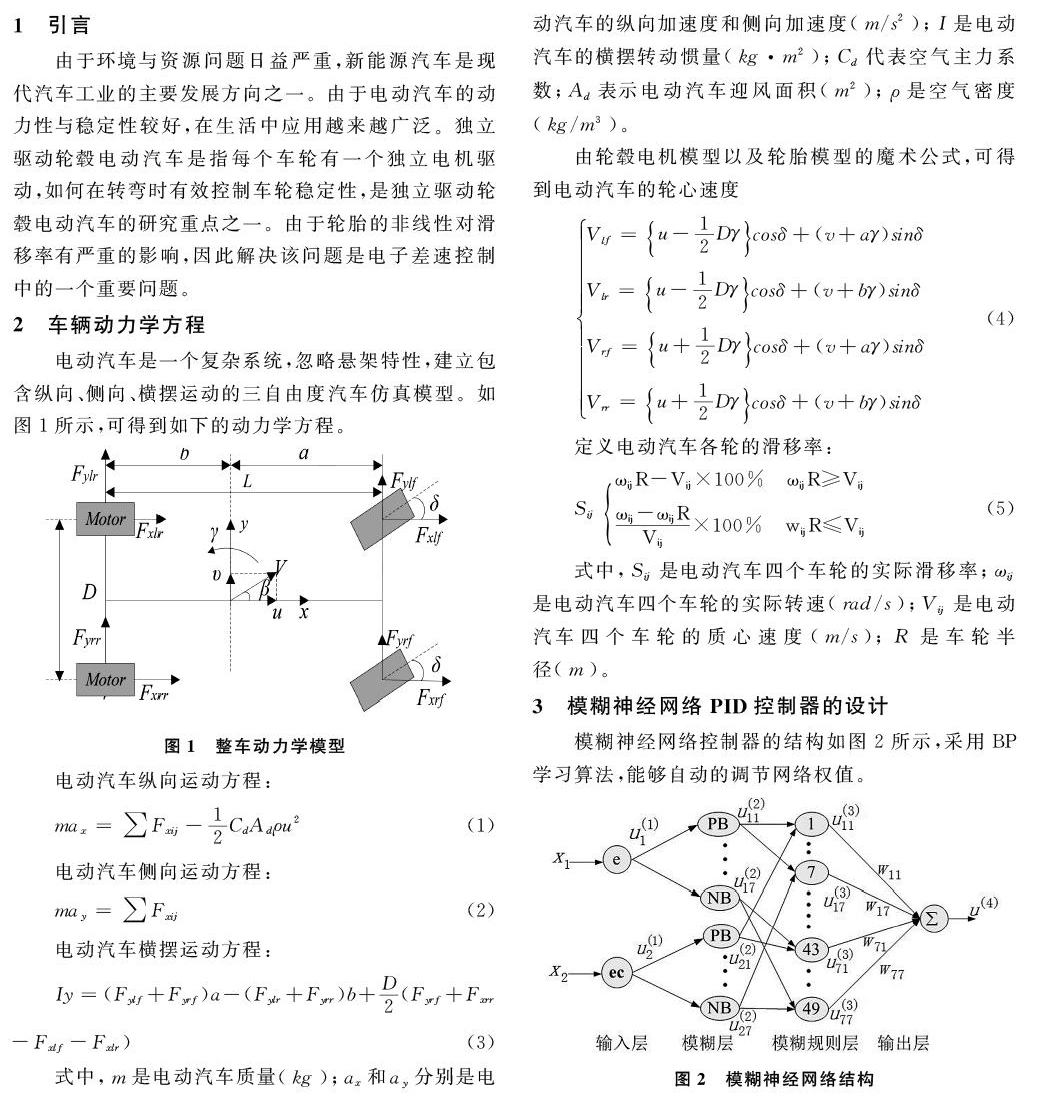
电动汽车是一个复杂系统,忽略悬架特性,建立包含纵向、侧向、横摆运动的三自由度汽车仿真模型。如图1所示,可得到如下的动力学方程。
5 结论
本文基于电动汽车滑移率设计了模糊神经网络PID的电子差速控制系统。仿真结果表明,该控制系统能够保证独立驱动的轮毂电动汽车在转弯行驶时,电动汽车车轮的滑移率控制在最佳范围内,保证轮毂电动汽车行驶的稳定性和安全性。
参考文献
[1]徐国凯,赵秀春,苏航编著.电动汽车的驱动与控制[M].北京: 电子工业出版社,2010.
[2]赵艳娥,张建武.轮毂电机驱动电动汽车电子差速系统研究[J].系统仿真学报,2008,20(18):4767-4768.
[3]崔新,侯明善,秦琴.基于目标最优机动的线性化运动学模型及其特性研究[J].弹箭与制导学报,2004,24(1):73-75.
[4]陆勇,张建荣,张大明.电动轮技术在电动汽车中的应用及发展趋势[J].机械设计与制造,2006,(10):169-171.
[5]王强.基于横摆力矩和变滑转率联合控制的电子差速控制系统研究[D].杭州:浙江大学,2011.
[6]吴浩.轮毂式电动汽车电子差速鲁棒控制研究[D].武汉:武汉科技大学,2013.
[7]Pacejka H,Bakker E.The Magic Formula Tyre Model[J].Vehicle System Dynamics,1992,21:1-18.
[8]臧怀泉,曹学铭,等.基于粒子群优化算法的模糊神经分数阶PID电子节气门控制器设计[J].燕山大学学报,2014,38(4):358-35.
- 初中语文教学中如何提高学生阅读有效性
- 幼儿园早期阅读:理念、举措与成效
- 小学语文教学中如何提高学生阅读能力与写作的探究
- 小学生古诗阅读兴趣的培养
- 核心素养视野下“绘本阅读”对幼儿语言能力的影响及养成探究
- 书读静处若闲庭
- 靠船下篙,让课堂阅读教学更高效
- 我国在线教育市场发展现状及未来趋势研究
- 基于新课改背景下的理实一体化中职电工电子教学探究
- 户外活动如何引领亲子游戏
- 东北地区高校消防安全管理工作浅析
- 关于如何培养幼儿安全意识的研究
- 汽车发动机冷却系统检测与维修探析
- 文化生产力如何推动经济发展
- 论鲁迅小说中的乡土情结
- 幼儿园保育工作问题及对策的思考分析
- 浅析徽派民居古建筑的美学性格
- 文化影响力视角下高校特色档案工作实践
- 影响数控机床加工精度的相关因素及改善对策
- 益智弹珠对儿童数学思维的构建
- 提高农村初中数学教育教学质量
- 高校学生党支部组织生活创新性研究
- 用心观察,用爱践行
- 小学数学教学中批判性思维的培养
- “双一流”背景下高职院校学习型学生党组织建设探究
- pullover
- pull over
- pullovered
- pull over / pull sb/sth over
- pullovers
- pull/push the door to
- pull-rank
- pulls
- strong minded
- strong-mindedly
- strong-mindedness
- strong-mindednesses
- strongness
- strongnesses
- strong position
- strong possibility
- strongroom
- strong-willed
- strong willed
- strontium
- strontiums
- stroppier
- stroppiest
- stroppily
- stroppiness
- 怀娃婆赶集——人里看不出人
- 怀娠
- 怀子
- 怀孕
- 怀孕儿媳妇于儿子死后所生的男孩
- 怀孕后,胎儿未满28周就产出
- 怀孕呕吐
- 怀孕妇女于丈夫死后所生的女儿
- 怀孕妇女于丈夫死后所生的孩子
- 怀孕已过28周,但尚未足月而分娩
- 怀孕得子的希望没有实现
- 怀孕未足月而胎儿堕出
- 怀孕生子
- 怀孕生育
- 怀孕的妇女
- 怀孕的马
- 怀安
- 怀安丧志
- 怀安败名
- 怀宝
- 怀宝夜行
- 怀宝迷邦
- 怀宠
- 怀寄
- 怀山