黄贺诚 姚逸文 张孟珂
摘 要 为实现人脑直接控制外部设备的目的,本文设计了一种利用人体脑电波信号作为控制命令来源,通过无线方式传递控制者实际操作信息,最终实现对Mini机械臂的智能动作操作系统;本系统提供了一种新的人机交互方式,拓展了脑电采集及控制设备在工业生产、健康医疗、生活等领域的应用前景。
关键词 脑电波 机械臂 动作
中图分类号:TP368.2文献标识码:A
0引言
脑机接口(Brain Computer Interface, BCI)技术主要是基于人脑电波进行操控的一种新型技术,其采用意念控制方式达到了基本的人机互动要求,基于脑电波(Electroencephalogram,以下简称EEG)的控制系统能够通过特定的测量技术手段提取大脑内部的思维活动信息,然后通过嵌入式平台分析该信息中包含的人脑真实意图,并将其转化为对外部设备的控制命令,最终实现人脑直接控制外设的目的。
本文设计了一种通过获取意念脑电波信号并作为处理对象,在提取信号特征后构建训练库,并最终实现对小型机械臂动作进行精确控制的系统,操作者能够使用意念操作机械臂按需运动,突破了传统的物理按键作为控制端的局限性。
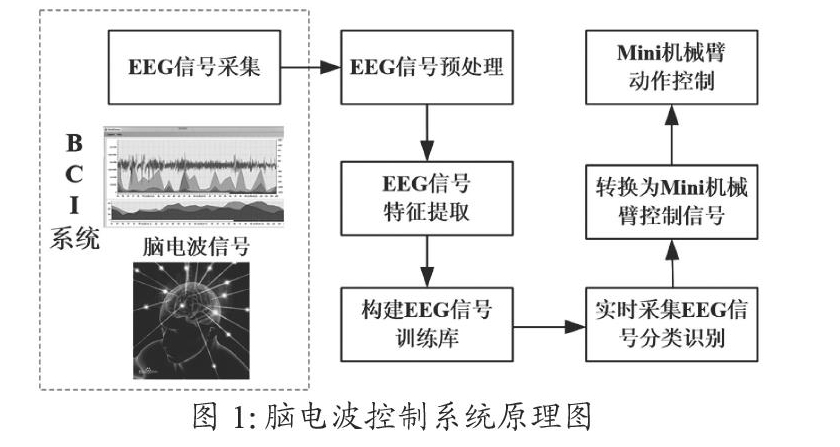
1系统总体设计
本系统原理如图1所示,BCI系统首先采集EEG信号,并通过无线蓝牙方式传送至嵌入式系统平台,经过信号滤波等处理后输入至特征提取模块,待提取到能够有效反映出操作者真实意图的特征量后,送往分类器进行分类识别,最后将分类结果转换为实际的Mini机械臂控制指令。
2系统功能模块设计
2.1脑电波信号采集
本系统通过无创方式采集操作者大脑皮层的脑电波信号,然后利用无线蓝牙模块将EEG数据传输至嵌入式主控平台。EEG信号是一种由大脑中的神经元之间以电离子形式传递信息而产生的生物电现象,具有较为明显的频率特性,其频率变动范围通常在0.1Hz-50Hz之间,不同频带分别表示不同的精神状态,例如放松、集中、思考、无意识等。
2.2脑电波信号预处理
由于采集到的大脑皮层上的EEG信号是由大量神经源共同放电产生的,因此存在一定的频率重叠、且具很高的敏感性,本系统利用硬件滤波器滤除工频干扰噪声,而其他生物电噪声、环境噪声等,通过软件算法进行消除。
2.3脑电波信号特征提取
为从EEG信号中提取出能够有效地表征操作者实际意图的特征向量,本系统针对100个基准样本进行EEG频带能量分析,针对每个样本使用周期图法计算各频段的能量和能量占比,以实现对不同频段EEG信号的特征提取。
2.4脑电波信号训练库
根据得到的EEG信号的特征集合,在嵌入式平台上完成EEG信號特征数据库的神经网络训练模型的构建。
2.5脑电波信号分类识别
EEG信号分类识别的准确率直接反映了控制系统性能的好坏,因此对提取到的EEG信号进行特征选择,通过最佳分类器对实时采集到EEG信号进行识别,得出操作者的真实意图信息。
2.6机械臂控制信号转换
最后将解析出的操作者实际控制意图转换成Mini机械臂操控指令,如:舵机自由度、运动方向及角度、速度等,实现控制机械臂做出不同的动作。
3结论
本系统将采集到的脑电波信号以无线方式传输至嵌入式系统平台,然后对EEG信号进行解析,判断出对应的命令状态,进而去控制Mini机械臂做出对应动作,本系统结构简单,应用方便,可广泛应用于各个工程领域。
基金项目:国家级大学生创新训练计划项目“基于脑电信号的智能Mini机械臂控制系统的研究”(201910058027)。
参考文献
[1] 徐宝国,何小杭,魏智唯,宋爱国,赵国普.基于运动想象脑电的机器人连续控制系统研究[J].仪器仪表学报,2018,39(09):10-19.
[2] 赵素娜.脑控非完整移动机器人方法研究[D].广州:华南理工大学,2017.
[3] 孙瀚,张雄,张玉,郭曼云.基于脑电信号的脑机接口技术[J].安徽科技,2015(04):54-56.
- 大学英语四、六级考试对大学英语教学反拨作用的研究
- 浅析如何在初中体育教学中实施互动教学
- 大学英语教师课堂非言语行为与教学效果的研究
- 浅议如何上好初中美术欣赏课
- 高职院校英语教学“第二课堂”构建原则探究
- “终身体育”视域下大学生篮球教学的改革及发展趋势研究
- 新时代农村留守儿童家庭教育问题及策略
- 浅议微课助力于小学“音乐与相关文化”教学
- 浅析小学学校管理的基本思路
- 谈小学体育教学中如何做到因材施教
- 初中体育教学中提升学生主动参与的策略探究
- 探究小学语文教学中如何培养留守儿童的积极人格
- 在“像”和“不像”中发展学生的美术想象力
- 中学班主任教学管理工作的难点与策略分析
- 基于“互联网+”的青年就业创业研究
- 高校行政管理优化的可行性方向分析
- 谈本土红色文化在高中思想政治教学中的整合运用
- 课程思政”干预方案对高校学生精神动力影响的实践研究“
- 基于小组合作学习理念下的小学语文教学
- 英国职业教育改革创新及启示
- 农村小学语文新型教学研究
- 贸易融资业务全面风险管理方式研究
- 浅析高中物理教学中学生核心素养的培养
- 小学音乐教学中德育渗透的几点思考
- 小学高年级数学分层作业实施策略研究
- incestuously
- incestuousness
- incestuousnesses
- inch
- in-character
- in-charge
- in-charge-of
- in charge of
- inch-by-inch
- in-check
- inched
- inches
- inching
- in-chorus
- inch²
- inch¹
- incidence
- incidences
- incident
- incidental
- incidentalist
- incidentally
- incidentalness
- incidentalnesses
- incidentals
- 漫溢
- 漫滋
- 漫演
- 漫演鱼龙
- 漫漫
- 漫漫群生
- 漫漫荡荡
- 漫漫长夜
- 漫漭
- 漫漶
- 漫漶支离
- 漫澜
- 漫灌
- 漫灭
- 漫然
- 漫狂
- 漫生
- 漫画
- 漫笔
- 漫羡
- 漫著
- 漫衍
- 漫衍鱼龙
- 漫议
- 漫评