金坤坤 方世迟
摘要:在农业生产方面,大多数生产工作已经由机器代替人工,但是对于小规模的农业生产,除草这一方面暂时还没有比较好的处理方式。采用图像识别处理技术及机械除草原理除去小型农田或大棚里的杂草,不仅可以减少劳动力损耗,降低农业生产的成本,还能够提高农业生产效率。同时,多用微型除草机上设有土壤有害物质检测装置,对农作物的生长进行实时监控,方便对可能出现的问题及时进行解决。
关键词:数字图像处理;除草机;智能控制;智能检测
中图分类号:TP18? ? ? ? 文献标识码:A? ? ? ? 文章编号:1009-3044(2018)35-0247-02
1 概述
世界上有许多种类的杂草。据调查,世界上有50000多种杂草,其中约8000种对农作物造成不同程度的损害。杂草与农作物竞争养分、阳光、水和生长空间,因为它们比作物適应性强得多。阻碍农作物生长,直接导致农作物减产。为了维护农民的经济效益,去除杂草是十分必要的。由于杂草分布不均匀且随机所以目前去除杂草的方法一般都是大面积粗放式喷洒农药。
农药的大量使用,造成了许多不良后果;农作物的化学药物残留,杂草的变异(抗药性)等等,都是无法解决的。多用微型除草机可以识别出杂草,并将其去除,同时可以检测土壤的有机成分,使人对农作物的生长可以进行监控。
2 系统设计方案
本次我们设计的多用微型除草机主要应用在大型农田的除草问题上,多用微型除草机可以代替人工劳动力,在农田中自动除去杂草,并且实时对土壤进行检测。其工作过程是通过图像处理对杂草进行识别,再由机械刀去除;而土壤检测部分则是分析取样的土壤并将数据反馈到监控中心,进一步对土壤进行相应的改善。
2.1 软件设计
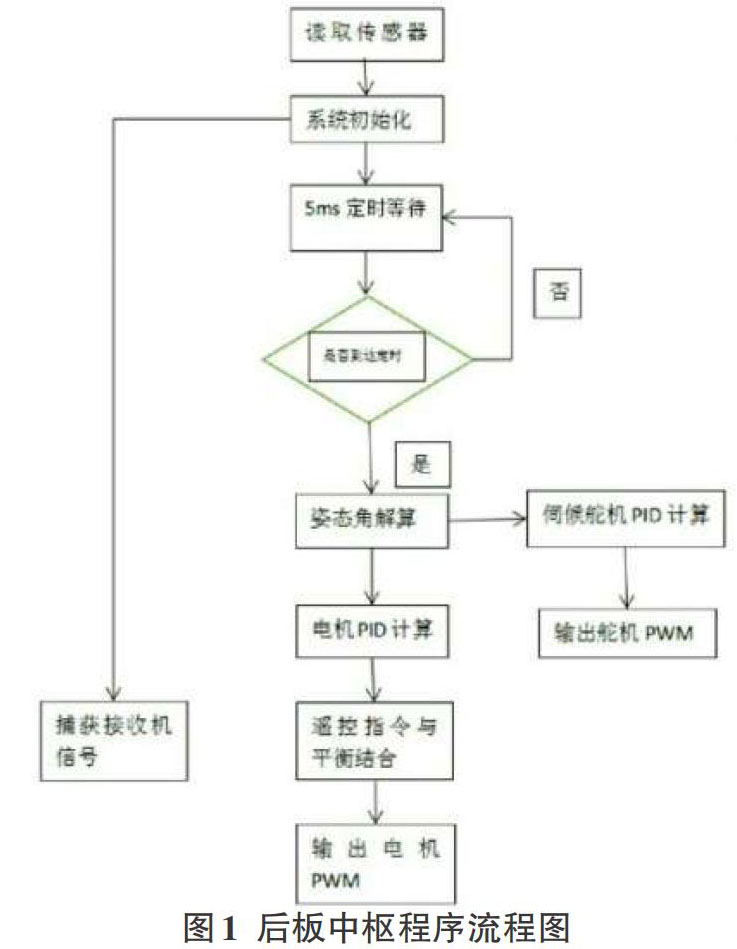
该多用微型除草机的控制核心是基于STM32的总控系统。各个传感器的信号传送到总控处理后使得系统能够及时做出反应。图1为后板中枢程序流程图。
(1) 图像采样
在对图像进行采样后,将其划分为小区域,即像素。每个像素都有两个属性:位置和灰度。采样和量化后,利用计算机对图像进行分析。最常用的分割方法是方形采样网格划分。图像被划分成许多水平线,它们是相邻像素。对其进行量化,将其用图像转为一个整数矩阵。再通过量化将图像数字化。
(2) 图像预处理
图像预处理是相对于是对图像处理的前期处理。输入的图像一般比较不精确,检测对象的边缘过于模糊,使得可分辨度很差。检测对象形状不精确,图像的边缘超过最低模糊界限,图像在视觉效果和辨别性等方面可能存在着诸多问题,这类问题属于“质量问题”,所以需要对采样的图像进行预处理。
(3) 图像增强
图像增强处理是对图像进行突出处理,将所需要的具体细节凸显出来,方便对图像进行识别。为了突出杂草和作物图像的特征,去除或减弱无用或有害的信息,并去除噪声。边缘强调等都是图像增强的内容。
(4) 图像分割
图像分割指将所需要的图像化分成若干个有意义的小部分,使得图像的表达更为简洁明了,为接下来的图像分析和管理奠定了基础。图像可以包含多个对象。为了准确地分析图像,必须将图像分割成若干区域。图像分割是图像分析和机器视觉处理中最基本同时也是最重要的研究内容,它是下一步分析的关键技术,因此图像分割结果的好坏将直接关系到未来图像分析的质量。灰度图像的分割往往依赖于图像灰度值的不连续性和相似性。图像分割一般有三种不同的方法(这里介绍两种),一种是将不同的像素划分成相应的对象或区域,即区域法,另一种是通过直接确定相邻区域之间的边界来分割,即边界法;首先检测边缘像素,然后连接边缘像素以形成边界以形成分割。
(5) 图像分析与描述
对已分割的或正在分割的图像中各部分属性,特点以及各部分之间的关系的分析与描述。
一般情况下,图像分析通过数学模型和图像处理技术来分析底层特征和上层结构,从而获取一些智能信息。模式识别和人工智能(AI)是用于分析、描述、分类和解释场景的技术,也被称为场景分析或图像理解。自对图像的研究深入以来,从图像的分析到具体问题的处理,都取得了许多研究成果。图像分析与图像处理和计算机图形学密切相关,相互重叠。符号表示各种图像,而不是图像本身的操作,并使用各种知识来推理。图像分析也与人类视觉研究密切相关。对人类视觉机制中一些可被识别的模块研究可以促进属于计算机独有的视觉的改进。
(6) 图像数据压缩
图像压缩是图像存储、处理和传输的基础,它是用尽可能少的数据来进行图像的存储和传输。图像数据是可以被压缩的,该理论支持图像编码的失真和图像数据的冗余。在大多数情况下,压缩图像不需要与原始图像完全相同,但是允许少量失真,只要这些失真不能被人眼感知即可。这为提高压缩比提供了有利的条件。允许的失真越多,压缩效率就越高。由于图像数据的可压缩性,存在大量的所谓的统计冗余,导致生理和视觉的冗余。去除这部分图像数据并不会使得图像无法识别。
(7) 图像识别
图像识别是基于图像主要特征的。任何一个图像都会有自己的特点,比如字母A有尖点,P有圆,Y的中心有锐角。图像识别中的眼动研究说明了视觉线总是集中在图像主要特征上(包括边缘,形状),即图像轮廓的曲率最大或轮廓方向突变的地方,以及图像中的信息量。E位是最大的。此外,眼睛的扫描路径总是从一个特征转移到另一个特征。因此,在图像识别过程中,感知机制必须排除输入的冗余信息,提取关键信息。同时,大脑中必须有一个机制负责整合信息,这些信息可以分阶段获得,形成一个完整的感知图像。
在人体图像识别系统中,复杂图像的识别往往需要通过不同层次的信息处理来实现。对于熟悉的图形,由于掌握了它的主要特征,它将被识别为一个单位,不再关注它的细节。整个单元的孤立单元材料被称为块,并且每个块在同一时间被感知。在汉字材料的识别中,人们不仅能够组成汉字的笔画或侧面块,而且能够组成经常一起出现的字符或单词的块单位。
通过计算机的视觉识别系统,图像内容会由图像特征来描述,这是最直接也是最有效的描述方式。实际上,在计算机视觉的基础上,图像检索也可以分为与文本搜索引擎相似的三个步骤:特征提取、索引建立和查询。
2.2 土壤检测
在除草机沿着农作物行前行的时候,车后的可调变不锈钢板会收集一定量的土壤样本,并实时检测其中有害物质是否过量,如果检测到土壤中含有过量的有害物质,及时通过控制端向中枢进行汇报。
2.3 硬件设计
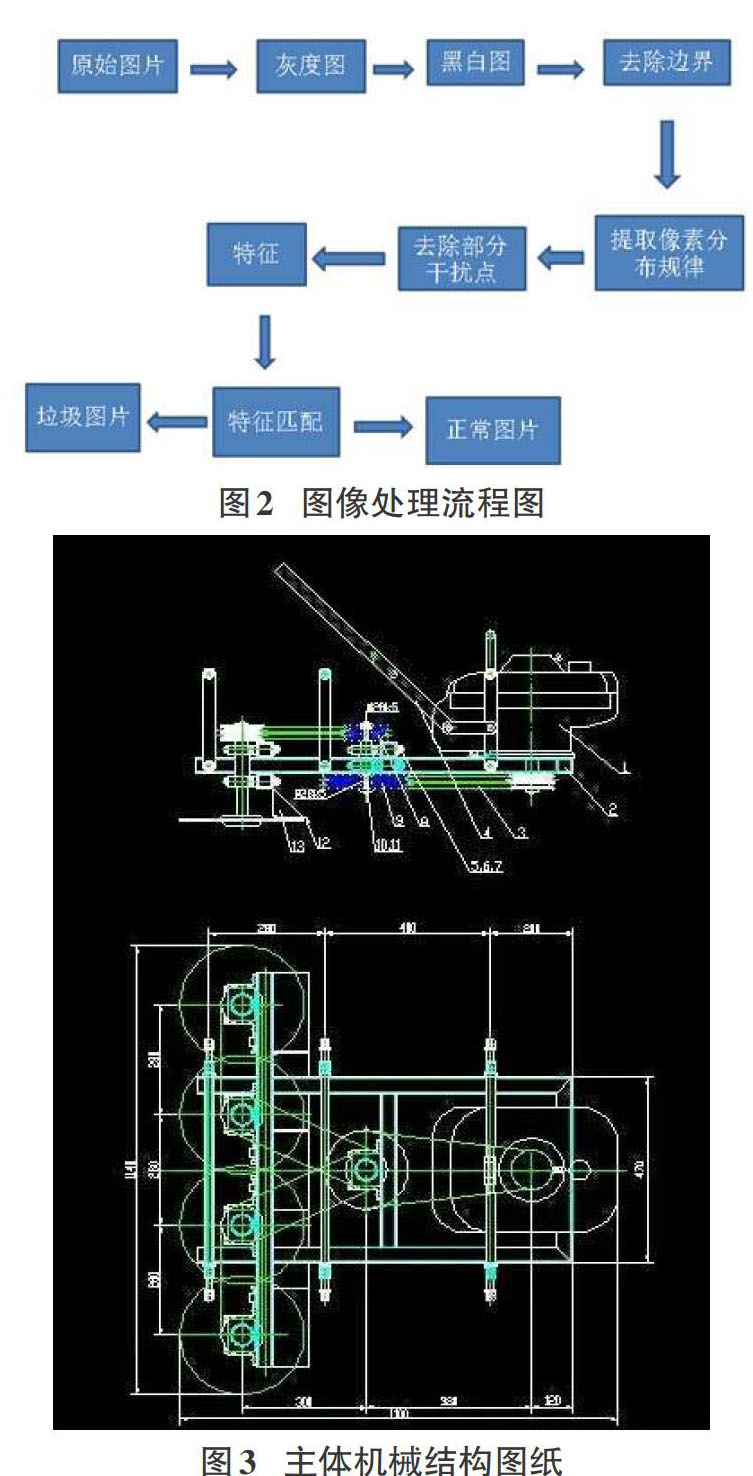
多用微型除草机主要由发动机、变速箱、仿形及耕深调节机制、机架、传动系统、除草部件指辊、滑板、图像处理系统等组成。
除草机前部装有灰度摄像机,完成作物识别,引导除草机沿作物方向行走;除草机中部装有彩色摄像机,不仅能够识别作物行中间的单个作物,还能够控制舵机提升除草机械手,改变机械手的高度。避免在单一作物被发现时危害作物。除草轮由不锈钢制成。不会因为在田间操作时长时间浸水而生锈;后方配置可调变不锈钢板,用于收集土壤及将除掉的杂草压入土中;除草轮之间间距为30cm,并且可以作用调整3cm,以适应不同的工作环境;动力部分采用1764W二行程汽油引擎;除草轮后方设有塑质挡板,防止泥土飞溅。
3 结束语
农田杂草不仅影响农作物的生长,还降低了农产品的质量。除草剂虽然能有效地抑制杂草,但是它影响生态环境。该系统设计的多用微型除草机可以手动或者自动控制除草,为除草机提供了新的设计理念。
参考文献:
[1] 莫晓利.数字图像处理技术与应用——除草机器人[D].天津科技大学,2015.
[2] 张占胜.三行步进式水田中耕除草机的机理与应用[D].黑龙江省水田机械化研究所,2013.
[3] 刘承东,李宁.业苗圃除草机器人结构设计[D].科技资讯,2015.
[4] 葛燕燕,安秋.基于机器视觉的中耕除草機的研制与实验[D].南京农业大学工学院,2015.
[5] 谭宏杰,孙明哲,李春胜,等.水田行间除草机的研究[D].吉林省农业机械研究院,2016.
[6] 侯学贵.除草机器人杂草识别与视觉导航技术研究[D].南京林业大学,2007.
[7] 张川川.算子刀具边缘快速提取研究[D].中北大学,2015.
[通联编辑:朱宝贵]
- 中小学体育教育向素质教育转变的策略
- 初中生篮球意识培养策略探究
- 初中体育与健康“小组竞赛积分制”教学模式初探
- 高中生身体形态与机能研究
- 数字化教学资源库建设与应用
- 浅谈初中记叙文写作指导
- 作文教学要缘情
- 通过听说读写,提升学生语文素养
- 浅谈初中语文引导教学策略
- 高中阅读教学要把握文本解读的度
- 筑造思维宫殿 培育核心素养
- 体验教育理念下农村中职学生社会责任感的培养
- 信息化环境下培养中职生职业素养的途径
- 绿色理念在中职化学教学中的运用
- 论母语在中职英语教学中的积极作用
- 浅谈中职语文教学与职业素养培养
- 农村中职语文教学中开展赏识教育的探讨
- 农村初中学校班主任工作略谈
- 高中生生涯规划教育现状及发展趋势分析
- 中小学校园欺凌事件防范及处理策略
- 生命教育在初中生物教学中的有效渗透
- 基于心理健康教育的高品质生物课堂实践
- 新教师视角下的初中地理课堂优化管理
- 高中地理课堂有效提问策略研究
- 探析在物理教学中渗透心理健康教育
- long distance
- long-drawn-out
- longed
- longed-for
- longer
- longers
- longest
- longest time
- longevities
- longevity
- longhand
- longhands
- long haul
- long-haul
- longhaul
- longing
- longingly
- longingness
- longingness'
- longingnesses
- longingness's
- longings
- longings'
- longing/yearning
- longitude
- 咬扯
- 咬指出血以自誓
- 咬指吐舌
- 咬文咂字(儿)
- 咬文咬字
- 咬文嚼字
- 咬断
- 咬春
- 咬架
- 咬死
- 咬死人
- 咬烂舌头往肚里咽——有苦无法诉
- 咬牙
- 咬牙关
- 咬牙切齿
- 咬牙声
- 咬牙恨齿
- 咬牙恨齿嚼牙切齿
- 咬牙碎齿
- 咬班虫
- 咬瘪
- 咬着不撒嘴
- 咬着石头才知道牙疼
- 咬着石头,才知道牙疼
- 咬破指头