汪文彬
系统开发主要包括后台数据库的建立与维护和智能检测程序的应用。结合物联网智能化管理技术,使用Python和SQL Server进行程序设计和硬件调试实现动态图表和实时监控等核心功能。系统工作流程:巡逻机器人按一定周期在工作范围内巡逻,通过其搭载的摄像头获取动态图像进行车牌识别和车辆违停判断,将数据反馈至管理终端,从而实现物业智能化管理。
应用背景
汽车数量日益增加、车位日趋紧张,车辆违停现象是城市治理的一大难题。一般解决方法是由物业安保人员进行管理。随着物联网技术的发展针对小区内乱停放的车辆,可通过机器人来代替保安人员来进行车辆停放状况检测,提高物业管理效率和准确性,以此规范小区内的停车问题。现阶段,车牌号识别技术已被广泛应用于道路交通技术上,但大都用于固定摄像监测点监测移动车辆。本系统运用了目前成熟的车牌号识别技术,将此技术搭载到巡逻机器人上进行违停监测,由于监测流程自动化程度较高,能极大减少人力成本,且监测过程反馈及时,能够提高管理效率。该系统相对于人力物业管理有很大的改进,通过测试达到了实用要求,具有较高的应用和推广价值。
系统总体设计
1.智能机器人模块:以STM32F103ZE单片机作为主控芯片,通过驱动程序进行初始化配置,对片内PWM外设单元进行控制,让机器人按一定速度运行。保证巡逻机器人工作稳定,可提供2个巡逻方案,一是红外线循迹巡逻,机器人通过红外线收发装置根据布置轨迹进行循迹;二是直接布置巡逻轨道,避开地表障碍物。巡逻机器人的结构分为主控机终端和机器人硬件系统,终端接收巡逻机器人反馈的视频信号,对其进行数据处理。
2.远程监控模块:有2个功能,一是VGA高清摄像头获取影像功能;二是影像数据化处理功能,通过总线编程,输入摄像头获取的影像数据。通过对SCCB接口进行编程,可以实现对图像的处理,调节图像影像数据、清除噪声等提高获取图像的质量和图像数据的稳定性。该电路自带FIFO芯片,使摄像头在工作时可以先将采集到的数据缓存在FIFO中,等所有的数據采集完再全部发送出去。通过这种方式可以提高摄像头工作时的稳定性和效率。
3.通信网络:为了能够更加全面、准确地采集环境参数,运用ZigBee的无线传感网络方式,首先在目标监测区域放置传感器设备,传感器设备间通过协议相互连接形成一个无线网络系统,摄像头获取的各种信息通过巡逻机器人上的子节点传入主节点,主节点逐次接收各子节点发送的数据后,将数据进行简单的处理和格式分装后存储并通过GPRS发送到网站端。该模块主要通过CC2530控制ZigBee模块来实现子节点与主节点之间的通信,将数据信息等汇总于主节点之后再通过GPRS联网模式传输给网站。
创新型应用
1.动态车牌识别
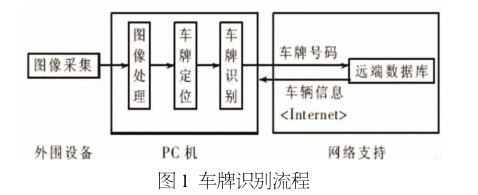
识别过程分为车牌定位、车牌倾斜校正、车牌字符分割和车牌字符识别。车牌定位第一步就是对车牌进行模糊定位;第二步识别车牌的颜色信息数据实现车牌精确定位;第三步是分割车牌,获取的图像通过软件的特定处理,将整块的车牌图像分解为单独的图像以供识别。其输入是车牌定位后得到的车牌图像,最后输出是就是通过图像处理分割后得到的可供识别的字符图像,通过转换成计算机可识别的二进制数据,识别流程图如下图所示。
实现方式:确定车辆静止后,通过巡逻机器人上搭载的摄像头实时拍摄汽车图像,进行车牌识别。车牌特征目前较为流行的有2种定位方法:一种是通过颜色来进行分割;一种是用边缘检测的方法进行分割。定位使用Python的PIL库读入图片后缩小图片,转化成灰度图像,创建20×20的像素为1的矩阵,并和图片重合,进行高斯模糊来缓解由于摄像头或者环境产生的噪声。基于OTSU自适应阀值算法进行二值化处理,找到图像边界,因为车牌中有大量的垂直边缘,利用这个特征可以定位车牌,或者根据阈值找到对应颜色来定位车牌。然后,进行车牌的矩形校正。在消除车牌的间隔符和上下边框后,分割得到车牌的各个字符,再通过训练好的SVM模型进行识别,识别出车辆的车牌数字。最后根据粗细程度判断最后一个数字是否为车牌边缘。
2.车辆违停识别判断
巡逻机器人通过摄像头获取车牌号,机器人自身携带阅读器并通过每个车位的电子标签获取位置号码。当机器人发现车牌号与位置号码是否对应,若不对应则确认是否为客车位,若为客车位则进行停车位置检测,设定车辆边缘到白线区域的距离阈值(车位宽度240 CM,车位间隔白线宽度15 CM)来判断车辆是否未停放在白线内、车尾是否朝外停放。如果存在压线、超线等行为则将相关结果通过无线网络传回数据库记录。
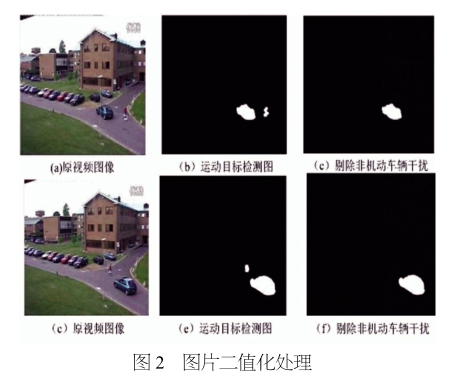
运用图像二值化处理来识别汽车是否超出停车区域,首先获取图像信息,改变图像的灰度值将图像呈现黑白效果图。选择合适的阈值范围,通过二值化处理后图像仍然可保留其特征。为了能得到准确的二值化图像,一般采用封闭、连通的边界定义不交叠的区域。可以依据图像像素与阈值比较来判断是否为目标检测的物体。大于等于设定值,则为目标物体,小于设定值为非目标物体,可以排除。这种方法适用于目标待测物的灰度值变化较小,且与环境背景的灰度值有较大差异的情况。如果物体同背景的差别表现不在灰度值上(比如纹理不同),可以将这个差别特征转换为灰度的差别,然后利用阈值选取技术来分割该图像。动态调节阈值实现图像的二值化,可动态观察其分割图像的具体结果,图片二值化处理如下图所示。
本系统开发主要包括后台数据库的建立与维护、智能机器人的开发和智能检测程序的应用,对于智能检测程序要求检测和匹配数据正确性高,应用程序工作稳定、功能完备等。系统以智能化管理为切入点,采用机器人巡逻代替人工,对园区的管理来说是一个新颖的方式。可以及时发现车辆违停状况,提高物业管理效率和准确性,利于维护园区秩序。
- 浅析高职语文在高职教育中的角色与功能
- 为孩子营造一片绿的天地——小学语文学业评价浅谈
- 浅谈以文带诗式趣味语文课堂教学
- 翻转课堂引入高中语文教学的现实困境与完善
- 拓展阅读教学,积累写作素养
- 拓展阅读在高中文言文教学中的应用分析
- 浅谈一年级拼音教学
- 农村高中作文教学现状及对策思考
- 浅析小学数学教育中如何培养独立思考能力
- 美术(绘画)教育课堂教学模式探讨
- 作文教学要注重说的训练
- “自主—导学”教学模式下的生动课堂
- 小学语文教学中的儿童视野探析
- 立足于学生学习视角分析小学语文朗读教学
- 初中文言文教学经验浅谈
- 作文教学“四趣曲”
- 试分析小学作文教学的创新途径
- 演示法在小学语文教学的运用艺术剖析
- 浅议文言文朗读教学
- 小学语文大阅读教学实施策略探微
- 为语文教学构筑“一堵墙”
- 浅谈农村小学作文教学尝试
- 小学汉语拼音教学中存在的问题及对策
- 小学语文教学语言特点新探
- 小学语文教学低效化的成因剖析及对策思考
- n /a
- naan bread
- nab
- n.a.b.
- nabbed
- nabbers
- nabbing
- nabs
- nace
- nadir
- nadiral
- nadirs
- naff
- naffed
- naffer
- naffest
- naffness
- naffnesses
- naff-off
- naffs
- nag
- nagged
- naggers
- nagging
- naggingly
- 不能明辨事理
- 不能更改、必须遵守的信条
- 不能望其项背
- 不能核桃栗子一起数
- 不能梳了抓髻再梳辫子
- 不能横行了
- 不能正己,焉能化人
- 不能正常活动或工作
- 不能正确估计自己的能力
- 不能治本的法术
- 不能活动
- 不能添斤,也要添两
- 不能清晰地看见
- 不能用人的长处,便是自己的短处
- 不能用语言来形容
- 不能相信
- 不能相容
- 不能相比
- 不能相见
- 不能相遇
- 不能瞒着锅台上了炕
- 不能继承前人事业而使其中断
- 不能继承前辈事业而使其中断
- 不能肯定
- 不能胜任