【摘? 要】工程的机械制造的大量工作是以结构件的生产加工为主,而焊接是加工环节中最为繁重的工序,如何提高结构件的焊接效率和质量,是提高产能的有效途径。传统的焊接工艺大量采用手工MAG焊,焊接质量稳定性差,效率低,劳动强度大,对工人的健康危害大,无法满足现代化工程机械生产的需求。实践证明采用高效自动化焊技术尤其是机器人自动焊技术可以大幅提高生产效率和焊接质量,实现规模化生产,提高企业的市场竞争力。
【关键词】智能化;自动焊接;机器人;物流线
引言
基于前期与客户的多次沟通交流,工件的材质为碳钢,尺寸范围长x宽x高≤2489x2065x610mm,重量≤800kg;产能:每月26天班、每天2班、每班次工作时间10h。按照满足15min生产节拍,60台/天布局焊接生产线。初步确定生产线占地面积:长120米、宽18米。
1.产线整体布局
1.1产线区域划分
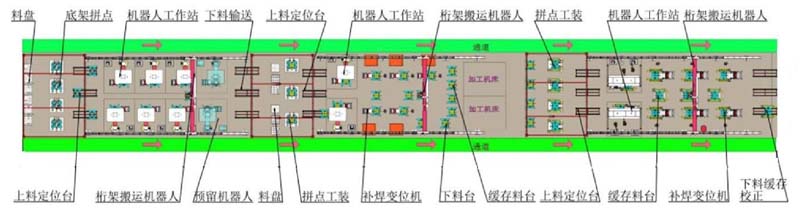
根据工件的结构特性与焊接工艺要求,制定结构件的焊接次序。生产线划分为底架拼搭区域、底架机器人自动焊接区域、底架总成拼搭区域、底架总成机器人自动焊接区域、底架总成机加区域、行走架总成拼搭区域、行走架总成机器人自动焊接及补焊区。为完成小挖行走架拼点、自动焊接和物流输送,各区域生产物流线采用集中控制,生产信息实时流转、存储。
1.2工位划分、设备配置
为满足焊接工艺要求,焊接工位分为拼焊工位、机器人自动焊接工位,人工补焊工位。以工件的尺寸与重量为条件,并根据工件需要焊接的位置,底架与底架总成采用2.5吨 L型变位机、行走架采用5吨L型变位机。各工位之间的物流输送由桁架搬运机器人、输送缓存板链、KBK柔性起重机(客户自备)、AGV小车(客户自备)、工件定位缓存输送板链及缓存料架负责工位间的工件输送。
1.3产线布局
2.物流方案配置
在物料搬运过程中,通过将智能化与自动化进行结合,可实现无人操作,更好的缓解物料搬运工作人员的压力,提高搬运效率缩短生产时间。
2.1物流路线
底架拼点工位→输送板链缓存(打码机打码)→桁架搬运机器人自动转运→底架机器人自动焊接工位工装自动装夹→输送板链缓存→底架总成拼点工位→KBK柔性起重機人工调运→输送板链缓存→桁架搬运机器人自动转运→底架总成机器人自动焊接工位工装自动装夹+底架总成人工补焊+加工中心机床→AGV小车转运(柳工自备)→行走架人工拼点+工位→桁架搬运机器人自动转运→行走架机器人自动焊接工位工装自动装夹+行走架人工补焊→输送板链缓存→人工校正工位。
2.2物料的自动识别
各工位间的物料流转通过桁架搬运机器人、输送缓存板链、AGV小车完成。在对物料流转设备进行硬件设计的时候,需要配有识别传感器、打码扫码等相关模块,识别物料并将信息传输给控制系统。
底架拼点完成后要首先将物料放置于升降定位料台上,升降定位料台上配置有在位检测传感器与上下位置到位检测开关;输送板链上配有编码器并设有前后限位传感器、工件在位检测传感器;打码机在工件的规定位置打码;桁架抓手上配有开闭到位检测开关、工件在位传感器、扫码器;
2.3物流的控制
物流控制系统由生产线控制系统、区域控制系统和站点控制系统组成分层式控制系统,分别控制各工作站点的物流过程,同时又可集中获取数据、集中管理和集中控制的自动控制系统。
主线体采用西门子1516 PLC作为总控,负责任务分配和收集反馈信息,从而进行智能管理和调度。每一个工位(包过人工工位、机器人工位、桁架搬运机器人)做从站,分别执行各自的任务。每个桁架搬运机器人具有独立的控制系统,包括行走速度控制、位置检测、工位识别、工件在位检测、运行状态指示等。
3.结语
智能焊化接物流线采用模块化设计原则,可根据实际使用需求进行任增减和配备,以满足不同焊接的需要。在系统硬件标准化的基础上,通过软件编程输出,可以实现多台机器执行程序相互复制,对于多台同样设备的安装调试,可以交叉进行程序编程,相互之间程序互相复制,以减少逐台设备编程。通过采用机器人自动焊接提高焊接质量和效率,采用智能物流搬运设备进行物流转运,可以提升工程机械制造过程中整体加工装备水平,提高效率,降低综合成本,提升国内外市场竞争力,亦可为国内装备制造业的提升发展做出更大贡献。
参考文献
[1] 李义强, 郑? 睿, 卢卫子,等. 智能化物料搬运机器人的系统开发与结构分析[J]. 机械工程与技术, 2019, 8(5):17.
[2] 马甘霖, 李发海, 李沁怡. 智能物料搬运机器人的设计与研究[J]. 电子制作, 2020, 000(001):19-21.
[3] 陈广文. 一种物料搬运机器人的执行装置,物料搬运系统和方法[J]. 机械科学与技术, 2019, 85(74):115.
[4] 张立勋, 王令军, 许伟科,等. 高速物料搬运机器人实时控制系统研究机械科学与技术, 2019, 26(4):32-35.
作者简介:张立轩(1986-),男,汉族,江苏徐州人,本科,机械助理工程师,研究方向为机械设备设计和开发。
徐州华恒机器人系统有限公司? ? 江苏徐州? ? 221000
- 基于APOS理论视域下初中数学概念课的有效教学
- 基于数学核心素养下的数学课堂教学
- 从数学实验到数学实验工具的思考
- “限讲、合作、展示”模式下中考数学微专题复习课设计的研究
- 探究基于有效教学的初中数学概念课策略
- 浅谈初中数学教学中函数思维的培养方法
- 探究初中数学解题能力的培养策略
- 浅谈初中数学概念教学中情境创设的有效性
- 谈数学教师的“固本与创新”
- 从核心素养角度谈初中课堂情境创设
- 浅谈初中数学课堂教学中教师的有效提问
- 例谈初中数学“问题串”策略的设计与应用
- 习题讲评应关注学生的发现
- 精心设计核心问题 发展学生思维能力
- 让学引思
- 基于新课标下初中数学实验微课模式建构的研究与思考
- 初中数学类比法教学的运用和思考
- 指向核心素养的初中数学教学设计策略探析
- 基于学习者视角下的初中数学“自由课堂”初探
- 基于APOS理论下数学史融入一元二次方程概念教学设计
- 把握主线类比探究,归纳性质素养提升
- “HPM”视角下的课堂教学实践与反思
- 轴对称特性的解题应用探索
- 几何动点问题的解题策略探讨
- 对一道函数综合题的突破与反思
- bitchiness
- bitchinesses
- bitching
- bitch-up
- bitchy
- bitch²
- bitch¹
- bite
- bite into
- bite into sth
- bite off
- bite-off-more-than-one-can-chew
- biters
- bite's
- bites
- bite-size
- bite the bullet
- bite-your-tongue
- bite your tongue
- bite²
- bite¹
- biting
- bitingly
- bitingness
- bitingness'
- 印象画派
- 印象画派的奠基人
- 印迹
- 印造
- 印鉴
- 印钮
- 印销
- 印面
- 印靶子
- 印韨
- 印鼻
- 印龟左顾
- 危
- 危丝
- 危乎殆哉
- 危于卵累
- 危于投卵
- 危于累卵
- 危于重卵
- 危亟
- 危亡
- 危人自安,君子不为;夺人自与,伯夷不多
- 危侧
- 危俊
- 危冠