变形Liu混沌系统控制仿真实验设计
赵海滨 颜世玉
摘? 要 根据变形Liu混沌系统的状态方程,采用第一个状态变量设计控制器,并采用控制器进行混沌系统的镇定控制。采用Python语言编写脚本程序,进行变形Liu混沌系统的镇定控制。数值仿真结果表明,设计的控制器能够进行变形Liu混沌系统的镇定控制,状态变量快速收敛到零。
关键词 变形Liu混沌系统;数值仿真;仿真实验;Python
中图分类号:G642.0? ? 文献标识码:B
文章编号:1671-489X(2020)16-0039-03
Simulation Experiment Design of Modified Liu Chaotic System Control//ZHAO Haibin, YAN Shiyu
Abstract According to the equation of the modified Liu chaotic sys-tem, the first state variable is used to design the controller, and the?controller is used to stabilize the chaotic system. The program writtenin Python language is used to stabilize the modified Liu chaotic sys-tem. The numerical simulation results show that the designed con-troller can stabilize the modified Liu chaotic system and the state variables converge to zero rapidly.
Key words modified Liu chaotic system; numerical simulation; simulation experiment; Python
1 前言
混沌是非线性系统的典型行为,能够采用电子线路进行模拟实现。混沌控制与同步始终是非线性科学领域的一个热点问题。刘崇新等在2004年提出一类含有平方非线性项的三阶连续自治混沌系统,即Liu混沌系统[1],对其動力学行为进行分析,并采用硬件电路进行实现[2]。王绍明等采用第一个状态变量设计控制器,进行Liu混沌系统的控制和同步[3]。高秉建通过Liu混沌系统构造多翅膀混沌吸引子[4],并进行数值仿真。
Liu混沌作为一个典型的混沌系统,具有广泛的应用。陆安山等在Liu混沌系统的第二式上增加了线性反馈项,构造了一种新的三维变形Liu混沌系统[5]。变形Liu混沌系统具有复杂的动力学行为,能够采用硬件电路实现,可以用于保密通信[6]。
本文根据变形Liu混沌系统的状态方程,采用第一个状态变量设计控制器,进行系统的镇定控制;采用Python
语言编写脚本程序进行数值仿真;在脚本程序中,采用SciPy库中的odeint函数求解常微分方程,采用matplotlib
库进行数据可视化。数值仿真结果表明,设计的控制器能够实现变形Liu混沌系统的镇定控制,状态变量渐进收敛到零,且收敛的速度比较快。
2 变形Liu混沌系统
2004年,刘崇新等发现一个新的混沌系统,即Liu混沌系统[1]。Liu混沌系统的状态方程表示为:
其中,x,y和z为状态变量,a,b,c,k和h为常数。当参数取a=10,b=40,c=2.5,k=1和h=4时,该系统为混沌状态。
陆安山等[5]提出一种新的变形Liu混沌系统,并通过硬件电路进行实现。变形Liu混沌系统的状态方程表示为:
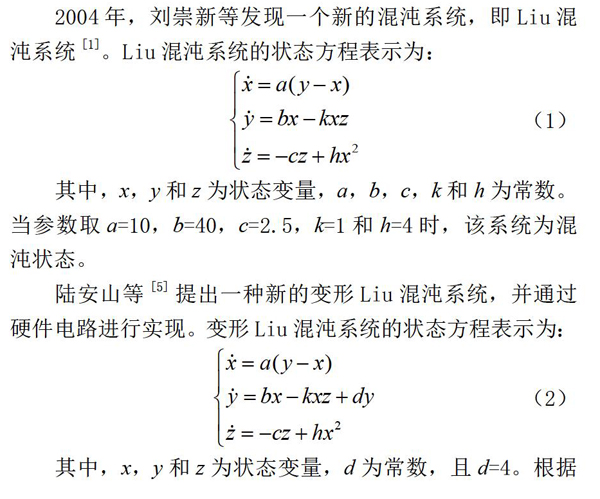
其中,x,y和z为状态变量,d为常数,且d=4。根据变形Liu混沌系统的状态方程,采用Python语言进行变形Liu混沌系统的建模仿真。变形Liu混沌系统的初始状态设定为x(0)=5,y(0)=6,z(0)=20,仿真时间设定为50秒。
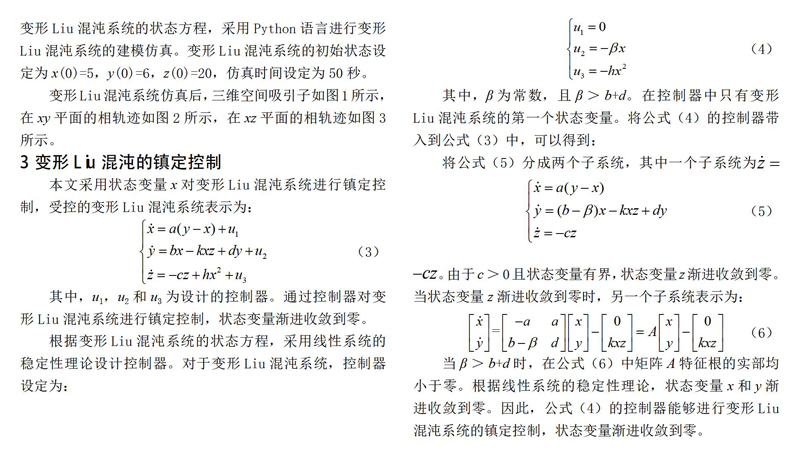
变形Liu混沌系统仿真后,三维空间吸引子如图1所示,在xy平面的相轨迹如图2所示,在xz平面的相轨迹如图3所示。
3 变形Liu混沌的镇定控制
本文采用状态变量x对变形Liu混沌系统进行镇定控制,受控的变形Liu混沌系统表示为:
其中,u1,u2和u3为设计的控制器。通过控制器对变形Liu混沌系统进行镇定控制,状态变量渐进收敛到零。
根据变形Liu混沌系统的状态方程,采用线性系统的稳定性理论设计控制器。对于变形Liu混沌系统,控制器设定为:
其中,β为常数,且β>b+d。在控制器中只有变形Liu混沌系统的第一个状态变量。将公式(4)的控制器带入到公式(3)中,可以得到:
将公式(5)分成两个子系统,其中一个子系统为。由于c>0且状态变量有界,状态变量z渐进收敛到零。当状态变量z渐进收敛到零时,另一个子系统表示为:
当β>b+d时,在公式(6)中矩阵A特征根的实部均小于零。根据线性系统的稳定性理论,状态变量x和y渐进收敛到零。因此,公式(4)的控制器能够进行变形Liu混沌系统的镇定控制,状态变量渐进收敛到零。
4 数值仿真
Python作为高级编程语言,具有语法简洁、编程高效和应用领域广泛等优点。采用Python编程,由于具有大量的开源库可以调用,代码量比较少,而且比较容易理解。本文采用SciPy库中的odeint函数求解常微分方程,进行变形Liu混沌系统的镇定控制。Odeint函数需要至少三个变量,分别是微分方程函数、状态变量初始值和仿真时间。本文采用matplotlib库进行数据的可视化。本文采用Python版本为3.7.3,SciPy库的版本为1.2.1,matplotlib库的版本为3.0.3。
根据变形Liu混沌系统的状态方程,设计控制器进行系统的镇定控制。采用Python语言进行变形Liu混沌系统的镇定控制,其脚本程序为:
import numpy as np
from scipy.integrate import odeint
import matplotlib.pyplot as plt
(a,b,c,d,k,h)=(10,40,2.5,4,1,4)? #參数
beta=b+d+2
def Liu(xyz,t):
x,y,z=xyz
u2=-beta*x;u3=-h*x*x? #控制器
f1=a*(y-x)
f2=b*x-k*x*z+d*y+u2
f3=-c*z+h*x*x+u3
return np.array([f1,f2,f3])
t=np.arange(0,4,0.001)
xyz=odeint(Liu,(0.1,-3,10),t)
x,y,z=(xyz[:,0],xyz[:,1],xyz[:,2])
u2=-beta*x;u3=-h*x*x
plt.figure(1);plt.grid(True)
plt.plot(t,x,b,t,y,r--,t,z,g-.,lw=1.0)? #显示状态变量
plt.xlabel(‘t /s);plt.legend([‘x,y,z])
plt.figure(2);plt.grid(True)
plt.plot(t,u2,b,t,u3,r--,lw=1.0)? #显示控制器
plt.xlabel(‘t /s);plt.legend([‘u2,u3])
plt.show()
在该脚本程序中,变形Liu混沌系统的参数为a=10,b=
40,c=2.5,d=4,k=1和h=4。在控制器中,参数设定为β=
46。变形Liu混沌系统的初始状态设定为x(0)=0.1,y(0)=
-3,z(0)=10,仿真时间设定为4秒。
在该脚本程序中,采用SciPy库中的odeint函数进行微分方程的求解,利用控制器进行变形Liu混沌系统的镇定控制,采用matplotlib库绘制状态变量和控制器的响应曲线。Matplotlib是Python的绘图库,可以非常方便地绘制二维和三维图形。
脚本程序运行后,变形Liu混沌系统状态变量的响应曲线如图4所示。在图4中,变形Liu混沌系统的状态变量快速收敛到零。控制器的响应曲线如图5所示,控制器也快速收敛到零。仿真结果表明,设计的控制器能够进行变形Liu混沌系统的镇定控制,状态变量快速收敛到零。
5 结论
变形Liu混沌系统具有非常复杂的动力学行为,能够用硬件电路实现。根据变形Liu混沌系统的状态方程,采用第一个状态变量设计控制器,并采用控制器进行变形Liu混沌系统的镇定控制。本文采用Python语言编写脚本程序,进行系统的数值仿真。在脚本程序中,采用SciPy库求解微分方程,采用matplotlib库进行数据可视化。该仿真实验只需要很少的代码,就能够实现变形Liu混沌系统的镇定控制。本文设计的控制器比较简单,容易实现,能够实现变形Liu混沌系统的快速镇定控制。
参考文献
[1]Liu Chongxin, Liu Tao, Liu Ling, et al. A new chao-tic attractor[J].Chaos Solitons and Fractals,2004,22(5):1031-1038.
[2]王发强,刘崇新.Liu混沌系统的混沌分析及电路实验的研究[J].物理学报,2006(10):5061-5069.
[3]王绍明,王安福.Liu混沌系统的单状态变量控制与同步[J].江西师范大学学报(自然科学版),2007(3):285-288.
[4]高秉建.基于Liu混沌系统生成的多翅膀蝴蝶吸引子[J].复杂系统与复杂性科学,2016(1):91-94.
[5]陆安山,陆益民.一种变形Liu混沌系统的分析及电路实现[J].江西师范大学学报(自然科学版),2014(5):468-471.
[6]陆安山,陆益民,李晏新闻.变形Liu混沌系统的同步控制及电路实现[J].湖南科技大学学报(自然科学版),2015(2):87-92.
作者:赵海滨,东北大学机械工程与自动化学院,讲师,博士,主要从事控制系统仿真技术及其应用的教学和科研工作;颜世玉,东北大学机械工程与自动化学院(110819)。
