马铃薯挖掘铲试验台架的研制
杨金砖 李晓明 李国民 邹雪剑 姜明海
摘 要:马铃薯挖掘铲属于马铃薯收获机上的关键部件,其结构及工作原理直接影响整机的作业性能,尤其在粘重壤土条件下,要使其达到减粘脱附、减阻增效以及挖深稳定的目的,须开展相关的试验研究工作。为此,依据近年开展的仿生挖掘技术的研究成果,通过专门的试验装置开展其在马铃薯挖掘收获方面的应用研究,以此获得试验对比数据,从中选择出较佳性能参数的挖掘铲,以共性技术的形式推广应用在需要的收获机上,以解决现有机器该关键零部件性能方面所存在的问题。
关键词:马铃薯挖掘铲;实验台架;减粘脱附
中图分类号:S225.71文献标识码:A
doi:10.14031/j.cnki.njwx.2019.08.003
作者简介:杨金砖(1981-),男,黑龙江哈尔滨人,主要从事马铃薯机械、播种机械的研究设计工作,E-mail:[email protected]。
0 引言
马铃薯收获机是马铃薯种植生产过程中所使用的关键设备,随着近年来我国农机化事业的发展,目前该类机具的简易机型——马铃薯挖掘机的市场保有量较高。各种类型的挖掘机基本能满足马铃薯分段收获的使用要求,其工作原理和机器结构较多类似,基本结构大致由悬挂(牵引)机架、挖掘装置、土薯分离装置、薯杂分离装置、传动系统等组合而成。作业时由拖拉机悬挂或牵引,挖掘装置中的挖掘铲入土,随着拖拉机带动机器前行,含薯的垄作土壤被切挖、掘起,通过铲面上升到分离筛上(也有采用转笼式分离辊的),边升运边实现土与薯分离和薯与杂的分离。一般分离过程随土壤条件及收获物洁净要求的不同而呈1级、2级或多级配置,其中分离筛(辊)部分的转动由传动系统带动完成。动力源一般为拖拉机后动力输出轴,通过齿轮箱变速变向和链传动的方式实现升运与分离功能。经过分离后的收获物从最末一级分离装置上被卸下铺放在作业后的土壤上,从而完成一个挖掘收获过程。纵观这一过程不难看出,拖拉机带动机器前行时含薯的垄作土壤被切挖、掘起的过程,是造成拖拉机牵引功率消耗的主要因素,尤其对于粘重壤土以及因挖掘深度控制不当而造成的深挖犁底层时,因此而呈现的较大牵引阻力极大地增加了拖拉机的动力消耗,也影响了机器工作效率的提高,额外的阻力还对机器的可靠性造成了潜在的威胁。总之,对马铃薯收获机来说,挖掘装置部分的工作效果在整个收获过程中是个不容忽视的关键环节,而开展入土、挖掘、土壤适应性、挖深稳定性控制等方面的研究,对于解决粘重壤土条件下的减粘脱附、减阻增效问题,以及提高挖深稳定性方面的问题等具有重要意义。
目前,单就挖掘装置为题开展上述研究的还不多见,这也造成了现有马铃薯收获(挖掘)类机械中的挖掘装置,尤其是挖掘铲方面存在着结构雷同化、减粘脱附及减阻耐磨等性能粗放化,凸显设计与制造方面的诸多不足,为此我们开展了马铃薯挖掘铲试验台架的设计研究工作。
1 马铃薯挖掘铲实验台架整体方案的设计
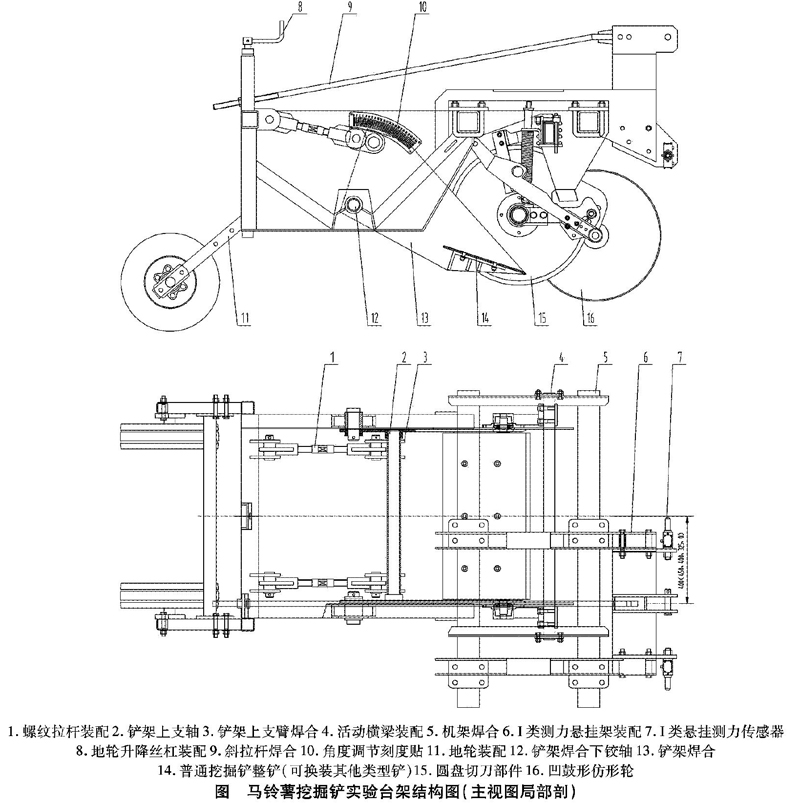
研发马铃薯挖掘铲实验台架的目的,是为了测试马铃薯收获机上的挖掘装置(挖掘铲)入土作业时的牵引阻力。为此,我们设计了一种全新的马铃薯挖掘装置试验台架。在主体机架上设置安装了可调节挖掘角度的铲架焊合部件,在铲架底面可更换安装不同挖掘铲,其挖掘角度可通过铲架体绕其下铰轴旋转实现调节;每一种角度可对应不同形式的挖掘铲做对比试验,同样每一种铲也可通过变角度获得不同挖掘状态下的阻力数值;其挖掘深度由限深部件凹鼓形仿形轮来控制,调节仿形轮与铲面间距,可保证挖掘深度的稳定;为消除两个侧向粘连影响的因素,在铲架两侧安装有立式切土圆盘部件,其作用是控制挖掘宽度;在主体机架后部设置安装2个后支撑轮部件。该轮通过丝杠调节高度,其作用是调节机架前后水平状态以保证挖掘角度准确,还可使台架纵垂面垂直受力保持平衡。同时,为适应拖拉机单垄作业时轮距跨垄要求,及兼顾平作和土槽试验时的要求,设置可横向调整安装位置的三点式悬挂架。该架的纵向对称中心面与铲架纵向对称中心面可偏置或重合配置安装。测力时该悬挂架下悬挂点处安装I类悬挂用测力传感器的下悬挂销,上悬挂点处通过上悬挂销安装角度和拉力综合传感器的上拉杆,分别对应联接动力源的三个悬挂点,即可测出各个力的矢量。其具体结构如图所示(为清楚表达其内部结构,主视图为局部剖或透视图)。
2 马铃薯挖掘铲实验台架的主要技术参数
挂接方式:三点悬挂式;
作业宽度:800 mm;
配套动力:≥50 hp;
外形尺寸(长×宽×高):2550 mm×1450 mm×1260 mm;
整机重量:220 kg;
入土角调整范围:0°~44°。
3 馬铃薯挖掘铲实验台架工作原理及关键部件的设计
3.1 工作原理
马铃薯挖掘铲试验台架是由拖拉机或土槽车提供牵引动力,试验台架采用三点悬挂方式与动力源连接固定。试验时由动力源牵引其行走,铲架入土深度应控制在机架两侧板底边保持在土壤地面之上,避免产生额外的挖掘阻力。铲架安装各类型铲子以一定入土角前行挖掘时,会在地面上切挖出U形断面的土壤槽,而断面为长方形的条状土壤带会经过倾斜铲面输送到铲子的后方落地。整个挖掘过程实现了土壤与铲架的相对运动,铲架受力通过机架反馈给测力传感器。而切挖土壤过程中,作用在铲子上的力可分解为水平和垂直两个方向的分力,其中垂直方向的力应尽量由凹鼓形仿形轮和机架后支撑轮所平衡,但作用在铲面上的压力会随挖掘角度的增大而造成摩擦阻力的增加。而水平方向的分力即为牵引力的反作用力,以此通过测力传感器即可测定挖掘装置的牵引阻力。通过在铲架上更换不同结构的铲子,即可测出相同土壤条件下的不同挖掘阻力,通过对比,找出适合不同土壤的最佳铲型结构,为马铃薯收获机的设计提供技术支持和理论依据。
3.2 关键部件的设计
本实验台架挖掘铲装置和普通收获机有所不同,我们在试验台架上创新设计了可调节挖掘角度的铲架焊合部件(铲架上可安装不同类型的挖掘铲)。靠铲架体绕其下铰轴旋转实现挖掘角度的调节,用两组螺纹拉杆来固定该角度,从而满足多种入土角度的实验要求。
设计了凹鼓形仿形轮,用来稳定控制挖掘深度,其纵向高度取决于活动横梁的固定位置,该位置可调。其横向安装位置保证凹鼓形仿形轮纵向对称中心面与铲架纵向对称中心面重合。
设计了立式切土圆盘部件,其作用是消除挖掘铲两侧泥土粘连的不利影响,同时也能限制挖掘宽度。其纵向高度依赖活动横梁的固定位置,其横向安装位置保证切土圆盘在土壤中开拓切出的沟槽置于铲架两侧板的正前方。
创新设计了可横向调整安装位置的悬挂架,该架的纵向对称中心面与铲架纵向对称中心面可偏置或重合配置安装,以适应拖拉机单垄作业时轮距跨垄距要求。悬挂架的纵向对称中心面与铲架纵向对称中心面的距离可按0 mm、325 mm、400 mm、425 mm调整。悬挂架前面的三个点与拖拉机等动力源连接,其中下两悬挂点处可安装I类悬挂用测力传感器,同时配备了可使机架纵垂面垂直受力平衡的后支撑轮部件,该轮可通过丝杠调节高度。
4 结论
本研究设计了一种全新的专门用于测试马铃薯收获机上的挖掘装置(挖掘铲)入土作业时的牵引阻力的试验台架。通过在该试验台架上更换不同类型的铲子,在不同土壤条件下,通过改变铲子的入土角度和挖掘深度,对土壤实施切挖和通过作业,进行所受阻力的试验和测试对比,可获得同等土壤条件下最佳减阻效果的仿生挖掘铲的结构形式,进而将其作为共性技术应用到马铃薯收获机上,降低作业时的挖掘阻力,降低能耗,减少磨损,提高效率,达到节本增效的目的。
本试验台架考虑到挖掘装置测力试验时的不同工况和动力源配置,既可适用于实验室内人工模拟土壤状态下以土槽车为动力源的情况,也可在室外田间实际作业情况下为拖拉机配套,从而保证试验的连续性和试验的广泛性。田间室内均可不受天气影响,即影响因素的不同设定,通用性好。
本试验台架具有工作原理及结构设计构思新颖巧妙,挖掘装置配备凹鼓形仿形轮部件具有限深稳定的作用,切土圆盘部件具有消除侧向黏连的阻力影响作用,铲架调节和控制铲子的入土角方便、准确,从结构上限定了切挖土壤的范围,使得切挖和通过土壤时的阻力与铲形具有直接和纯粹的关系,从中获得的试验数据对比性强,试验结论准确可靠、科学合理。因此,本试验台架对研究马铃薯挖掘装置的合理结构与配置,及仿生挖掘铲在减粘脱附、减阻增效方面具有重要作用。
參考文献:
[1] 石林榕,孙伟,王蒂,等.马铃薯仿生挖掘铲片的设计与仿真[J].干旱地区农业研究,2014(1).
[2] 李智勇,蒙贺伟,李亚萍.马铃薯收获机械研究现状及存在问题[J].新疆农机化,2016(2):19-22.
[3] 杨德秋,贾晶霞,越文峰,等.高度自控式马铃薯联合收获机升运装车装置[J].农机化研究,2011(9):96-99.
[4] 万恩超,尚书旗,王东伟,等.牵引式马铃薯联合收获机的设计与试验[J].农机化研究,2019(17):80-84.
