于勇 邢桢林 刘亚云 岳同奇
摘要:为解决动车组永磁同步电机在牵引工况下,负载状态的变化会带来控制性能的稳定,转动惯量的变化会削弱电机的动态响应能力,负载转矩的变化则会造成转速的波动的问题。为解决上述问题,建立被观测系统的状态空间表达式并分析了其能观性,基于Luenberger观测器的基本原理,设计了永磁同步电机Luenberger负载转矩观测器,然后利用观测结果对电流环进行前馈补偿。仿真结果验证了上述观测器的有效性,同时证明了电流前馈补偿作用能够提高系统的抗干扰能力。提出通过在线观测负载状态来实时地调整转速环控制参数,并对电流控制环路进行前馈补偿,从而提高控制系统的动态响应能力和稳定性。
关键词:永磁同步电机;转动惯量辨识;负载转矩观测;前馈补偿
中图分类号:TB文献标识码:Adoi:10.19311/j.cnki.1672-3198.2019.10.080
1永磁同步电机矢量控制
在永磁同步电机实际的运行过程中,直、交轴电流的分配受到电流极限圆和电压极限椭圆的约束,运行轨迹只能限制在二者的交集之内。因此,必须按照特定的规则来分配id、iq才能充分利用逆变器的容量,使电机出力达到最大,从而提高电机的运行效率。
最大转矩电流比控制是指在输出转矩恒定的情况下,通过合理分配id和iq,使得定子电流最小。MTPA控制从定子电流矢量入手研究id、iq的分配原则,定子电流矢量is的幅值为is,转矩电流之比可以表示为:
Teis=32pn[ψfcosδ-0.5(Ld-Lq)issin2δ](1)
设关于转矩角的函数:
f(δ)=32pn[ψfcosδ-0.5(Ld-Lq)issin2δ](2)
则f(δ)取得最大值的条件是其对δ的一阶导数等于零,二阶导数小于零,即:
f(δ)δ=0且2f(δ)δ2<0(3)
由一阶导数为零解得:
sinδ=ψf-ψf2+8(Ld-Lq)2is24(Ld-Lq)is(4)
将式(2-11)带入到二阶导数则有:
2f(δ)δ2=-32pncosδψf2+8(Ld-Lq)2is2(5)
显然此时f(δ)的二阶导数小于零,因此函数f(δ)存在极大值,且极大值存在的条件即为式(2-11),即转矩与电流的比值存在最大值的条件为式(2-19)。
可解得:id=-ψf+ψf2+8(Ld-Lq)2is24(Ld-Lq)
iq=is2-id2(6)
从上述分析可知最大转矩电流比控制实际上是对磁阻转矩的充分利用,其本质是对转矩角的控制,通过适当的调整转矩角使得电机在输出一定电磁转矩时定子电流最小。在逆变器的输出容量一定时,采用这种控制策略,能进一步提高永磁同步电机的效率,同时减小逆变器的工作电流,对逆变器的器件的容量要求更小,节省了成本,功率器件的损耗也相对减少了。所以本文采用最大转矩电流比控制方法作为电流的分配策略。
2带负载转矩观测器的永磁同步电机矢量控制
带有负载转矩观测器的永磁同步电机矢量控制系统框图如图1所示。永磁同步电机的双闭环矢量控制系统中,电流环的跟踪速度远大于速度环的跟踪速度。
图1带负载转矩观测器的永磁同步电机矢量控制系统框图
3仿真验证
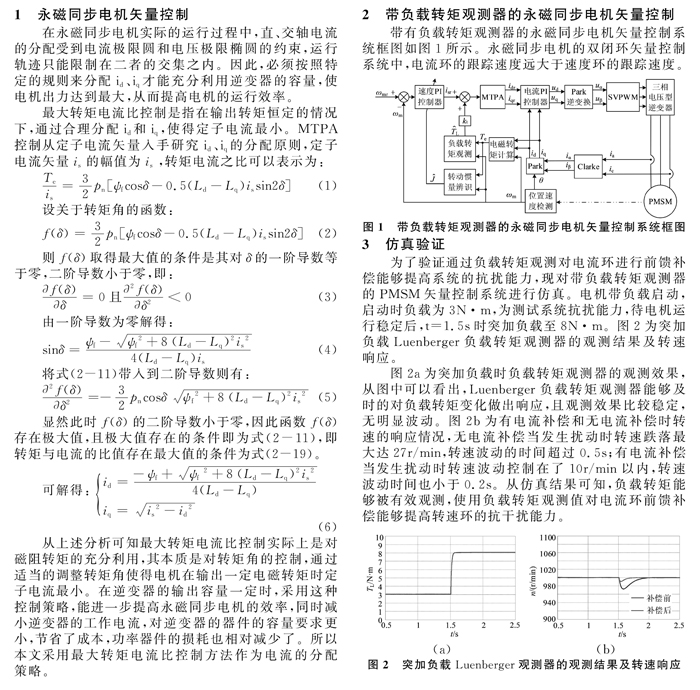
为了验证通过负载转矩观测对电流环进行前馈补偿能够提高系统的抗扰能力,现对带负载转矩观测器的PMSM矢量控制系统进行仿真。电机带负载启动,启动时负载为3N·m,为测试系统抗扰能力,待电机运行稳定后,t=1.5s时突加负载至8N·m。图2为突加负载Luenberger负载转矩观测器的观测结果及转速响应。
图2a为突加负载时负载转矩观测器的观测效果,从图中可以看出,Luenberger负载转矩观测器能够及时的对负载转矩变化做出响应,且观测效果比较稳定,无明显波动。图2b为有电流补偿和无电流补偿时转速的响应情况,无电流补偿当发生扰动时转速跌落最大达27r/min,转速波动的时间超过0.5s;有电流补偿当发生扰动时转速波动控制在了10r/min以内,转速波动时间也小于0.2s。从仿真结果可知,负载转矩能够被有效观测,使用负载转矩观测值对电流环前馈补偿能够提高转速环的抗干扰能力。
(a) (b)
4结论
本文首先介绍了动车组永磁同步电机的数学模型,在此基础上阐述了动车组永磁同步电机的矢量控制算法。基于状态观测器的基本原理,建立被观测系统并分析了其能观性,基于上述系统设计了永磁同步电机Luenberger负载转矩观测器,并将其加入到永磁同步电机矢量控制系统中对电流环前馈补偿,最后使用仿真软件对负载转矩观测器和带负载转矩观测器永磁同步电机矢量控制系统进行了仿真分析,仿真结果证明了本章提出的算法的有效性。该種控制算法通过在线观测负载状态来实时地调整转速环控制参数,并对电流控制环路进行前馈补偿,从而提高动车组牵引控制系统的动态响应能力和稳定性。
参考文献
[1]陈才学.基于观测器的永磁同步电机鲁棒稳定性分析与控制器设计[D].广州:华南理工大学,2014:1-6.
[2]Mohamed,EI-Saadany EF.A Current Control Scheme with An Adaptive Internal Model for Torque Ripple Minimization and Robust Current Regulation in PMSM Drive Systems[J].IEEE Transactions on Energy Conversion,2008,55(11):3836-3845.
[3]张耀中,黄进,康敏.永磁同步电机无传感器控制及其启动策略[J].电机与控制学报,2015,19(10):1-6.
[4]王松.永磁同步电机的参数辨识及控制策略研究[D].北京:北京交通大学,2011:4-8.
[5]Li Guoqi,Wen Changyun.Identification of Wiener Systems with Clipped Observations[J].IEEE Transactions on Signal Processing,2012,60(7):3845-3852.
[6]Zhao SH,Cui L,Liu GY.An Improved Torque Feed-forward Control with Observer-based Inertia Identification in PMSM Drives[C].2012 15th International Conference on Electrical Machines and Systems,Tokyo,Japan,2012:4367-4372.
[7]荀倩,王培良,李祖欣,等.基于递推最小二乘法的永磁伺服系统参数辨识.电工技术学报,2016,31(17):161-168.
[8]覃海涛.交流伺服系统自调整技术研究[D].武汉:华中科技大学,2011:82-90.
- 对毛泽东推进马克思主义科技思想中国化的哲学思索
- 简论革命年代毛泽东对“实用性”的重视
- 毛泽东的“思想建党”及其历史启示
- “致用”与“济世”:毛泽东早期教育经历与教育理念(1902年—1921年)
- 论我国生态文明建设
- 从当代青年状况的视角审视新时期共青团建设的成就
- 关于新时期红军长征研究的几点思考
- 党校党性教育成效评价指标体系探议
- 毛泽东“计划生育”人口思想的形成
- 论山西的革命精神之核心价值导向
- 抗日战争敌后战场八路军群众工作研究
- 高校马克思主义大众化的现状及路径思考
- 基层党校引导党员干部培育和践行
- 新媒体环境下正确引导大学生价值观念问题研究
- 艺术类大学生核心价值观外化的理论探讨
- 大数据时代大学生社会主义核心价值观培育路径探析
- 关于基层党校提高党性教育实效性的思考
- 积极探索实施党性教育“六步法”
- 流动人员人事档案信息化管理和应用
- 论法律的情怀消费
- 抓好意识形态工作 形成引领社会,凝聚、推动发展的强大精神动力
- 县域科学发展示范点建设视野下提升领导干部理想信念思考
- 基层党组织落实全面从严治党责任的思考
- 党员干部要在文化自信中坚定理想信念
- 夯实基层党建 支撑高校“双一流”建设
- crickets
- cricking
- cricks
- cried out
- cries
- cries out
- crime
- crimed
- crimeful
- crimeless
- crimelessness
- crimelessnesses
- crimes
- crime wave
- crimewave
- crime waves
- criminal
- criminalism
- criminalist
- criminallaw
- criminal law
- criminal lawyer
- criminally
- criminalness
- criminaloid
- 引起或形成
- 引起战争的事端
- 引起火灾的东西
- 引起火灾的人家
- 引起火灾的危险
- 引起灾难的人或事物
- 引起祸事
- 引起祸患的主要人物
- 引起祸患的人或事
- 引起纠纷
- 引起行动
- 引起词
- 引起重视,想要依照施行
- 引起麻烦、问题
- 引起麻烦之事
- 引起麻烦或祸害
- 引足救经
- 引路
- 引路侯
- 引身
- 引車
- 引车
- 引车前行的皮带
- 引车卖浆
- 引过