摘 要 目前社会的生产生活中,航模探空火箭已经运用到社会的各个方面,如军用靶机,人工降雨,地形勘探等等。但是从目前来看,航模探空火箭目前还存在着许多问题。目前航模探空火箭的发射都是人工点火,且距离较为接近,具有一定的危险性。除此之外,探空火箭后,由于其速度较快,升空后高度较高,往往无法观测到火箭发射后的各项数据以及确定火箭降落后的定点位置。因而,本系统主要是解决这两类问题,采用无线远程控制发射以及APM飞控+GPS全程监测火箭的实时数据,从而完成对探空火箭的全程跟踪。
关键词 无线远程控制;APM;GPS;实时数据与全程跟踪
中图分类号 TP39 文献标识码 A 文章编号 1674-6708(2016)166-0113-02
1 系统总体设计方案
整个系统分成远程控制发射和全程跟踪两大模块。远程控制模块以STC89C52和Siliconlab单片机为主控芯片,主要分成定时、电源,交互、串口通信以及继电器等4个小模块,并构成主机和副机两大分模块。远程控制模块主要功能是实现主机的定时显示,并在时间到达时,由串口通信模块像副机上的通信模块发送脉冲信号,并在此时点火火箭,实现远距离的控制发射。全程跟踪模块以APM飞控和GPS作为主要组成部分,并结合上位机软件Mission Planner实现对火箭的全程跟踪。火箭发射后,可在Mission Planner软件界面上实时监测火箭的速度、高度、升降速度、与航点距离以及火箭在GPS全球定位地图上的精确位置。除此之外,本系统还可以利用APM飞控自带的陀螺仪来调节火箭在发射前的姿态,从而实现标准的竖直发射。
2 远程控制发射部分设计
2.1 主控芯片
根据本系统的设计要求,选用低功耗、高性能的CMOS8位微控制器STC89C52RC 40I LQFP44,我们采用此芯片作为系统定时、计数、显示功能的实现,以该芯片为中心,结合定时模块、串口通信模块、继电器模块,从而构成整个大系统模块。该芯片结构简单,价格较低,应用广泛,以常用的C语言为设计语言,为系统的结构化设计提供了良好的基础。
2.2 定时模块
在火箭发射指令下达之前,需对指令进行一定的延时。本系统是通过对主机实现延时,从而控制火箭的发射时机。系统采用的是红外控制的方式来控制单片机进行有选择性的定时。定时时间范围为0s~9s。定时时间的选择由发射者从红外遥控器的选择上来确定[1,3]。
2.3 远程控制模块的设计实现方案
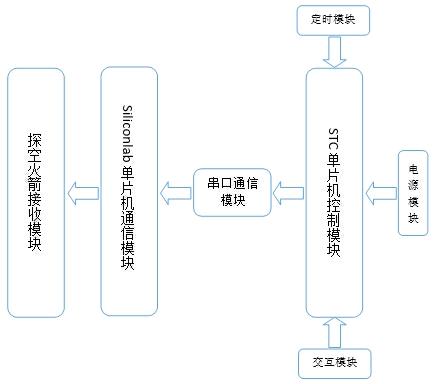
整个系统的方案图如图1所示,当操控者选择了所需要的时间时,单片机定时器模块开始倒数计数,同时并在显示器上显示:choosetime_s,Areyousure?当计时器到达零点后,芯片即通过串口通信模块向以Siliconlab为主控芯片的C10x模块发送相应的脉冲信号,同时C10x将此信号发送到远方的副机(接收机),主机与副机都会想起蜂鸣器警报[2,3],副机并同时为继电器通电,从而实现点火电路的连通。
3 全程跟踪模块
3.1 APM模块
APM是ArduPilot Mega系列飞控的简称,由美国3DRobotics设计,此产品全兼容于Arduino。本系统利用飞控的控制以及数据反映的特性,用来检测探空火箭的高度、速度、位置等精确的物理信息。本系统采用的是APM飞控。APM飞控系统是国外的一个开源飞控系统,能够支持固定翼,直升机,3轴,4轴,6轴飞行器。在此,我们只使用它的数据分析与采集的功能来记录探空火箭的高度、平衡速度、升降速度等精确信息。

APM主控芯片Atmega1280是AVRVI设计生产的一款高性能、低功耗的8位AVR微处理器。Atmega1280作为APM飞控的主控芯片,由于APM的商用开源特性,因而我们可以根据一些特定的需要,修改芯片当中已烧录的程序,也可根据不同环境使用需要,修改部分参数。
3.2 GPS模块
经过多次论证,本系统采用的是U-blox公司生产的NEO-6M GPS模块。ATK-NEO-6M-V2.3(V2.3是版本号)是一款高性能GPS定位模块。该模块采用U-BLOX NEO-6M模组。由于其自带的优秀特性,我们采取该型号芯片来实现在全球定位系统的地图上对火箭的实时追踪。可以满足各种配置需求。模块还自带可充电后备电池。
3.3 上位机Mission Planner
Mission Planner,由Michael Oborne开发。其主要用于与APM飞控匹配,作为APM飞控的上位机软件。其在本系统中主要作用是用来显示APM模块和GPS模块通过数传模块传送回来的数据信息,包括速度、高度、与航点距离、升降速度、地图定位以及平衡状态等。

3.4 全程跟踪模块的设计实现
全程跟踪模块以APM为中心,辅以GPS全球定位系统以及上位机Mission Planner,从而实现所需功能,如图3所示。在火箭未升空时,我们可以使用上位机界面左上角的陀螺仪平衡检测区域来调整火箭发射前的状态,并同时调整,尽量使火箭为标准的竖直状态。当火箭升空后,我们即可使用上位机的左下方速度检测区域以及右部GPS地图检测区域来监控火箭在空中的实时位置及相关的速度等数据[4]。
4 结论
整个项目系统由远程控制模块和全程跟踪模块构成。以STC、Atmega、Siliconlab主控芯片为基础进行模块拓展,构成了整个系统模块。从而实现了系统所需的相关功能。本文设计出远距离的安全发射装置,以C10X-433MHz的无线透明传输模块为基础,理论上的最远极限距离可达到1km,做到了理想中的远距离的安全发射。全程跟踪模块以APM飞行控制模块为基础,搭载GPS全球定位系统,配合Mission Planner上位机,实现了良好的全数字化、图像化的追踪功能。APM系列飞控原主要用于多轴以及固定翼等无人机上,本系统创新性的将APM飞控搭载到了航模探空火箭上,解决了军民在使用探空火箭时的一些定位问题。总的来说,将来探空火箭市场将会出现电磁发射的方式,会颠覆以往火箭发射的模式。
参考文献
[1]谭浩强.C语言程序设计[M].4版.北京:清华大学出版社,2010.
[2]童诗白.模拟电子技术基础[M].4版.北京:高等教育出版社,2009.
[3]郭天祥.51单片机C语言教程[M].1版.北京:电子工业出版社,2009.
[4]杨阳.基于APM开源飞控平台的四轴旋翼飞行器[J].信息通信,2015(8):68.
- 中国古代服装“意在留褶”的审美内涵及对服饰造型的影响
- 学校社会工作视角下中学生叛逆的解读
- 《反对本本主义》中调查研究思想对新时期高校开展思想政治教育工作的启示
- 我国知识产权远程教育的现状与对策
- 微课在高职院校二外日语教学中的应用
- 构建高校基层党建工作激励机制新路径
- 创新教育在高中思想政治教学中的体现
- 高校会计信息披露的质量评价问题探析
- 中职机械加工专业实训教学中的现状和对策
- 关于学校留守学生教育的几点看法
- 应用型本科院校大学生创业能力提升研究
- 网络环境下高职英语翻译教学模式探讨
- 核心稳定性训练对青少年排球运动员专项运动能力的影响
- 河南洛阳旅游区生态特色导游词创作与讲解课程教学反馈调查与分析
- 心理情景剧在中国高校中的应用与发展综述
- 互联网时代下大学生网络思想政治教育浅议
- 关于当前高校裸贷问题的若干思考
- 浅谈农村留守儿童语文教学的策略
- 创新课堂教学、预防功利性学习
- 主位推进理论在大学生英语写作教学的应用
- 论思想政治教育在高职学生就业指导中的作用
- 高校辅导员的责任构成及落实路径
- 网络环境下高校思想政治教育面临的挑战以及对策研究
- 创业教育对创业意愿的影响因素研究
- 浅谈如何利用实验教学,开发学员的自主思维
- superarctic
- superarduous
- superarduously
- superarduousness
- superarduousnesses
- superarrogance
- superarrogances
- superarrogant
- superarrogantly
- superartificial
- superartificially
- superaspiration
- superaspirations
- superassertion
- superassertions
- superassociate
- superassociates
- superassumption
- superassumptions
- superastonish
- superastonished
- superastonishes
- superastonishing
- superastonishment
- reaccustoms
- 风行电击
- 风行电击风行电扫
- 风行电扫
- 风行电掣
- 风行电照
- 风行草从
- 风行草偃
- 风行草僵
- 风行草靡
- 风行雨散
- 风行雷厉
- 风行露宿
- 风衍
- 风衢
- 风衣
- 风表
- 风表龙姿
- 风袖
- 风裁
- 风裁棱棱
- 风裳
- 风襟
- 风观
- 风规
- 风角