摘 要 随着经济与科技的快速发展,我国微电子产业、汽车产业实现了长足的进步,智能小车技术的快速发展就是这一进步的最直观体现。在本文基于单片机的智能小车避障循迹系统设计展开的研究中,笔者通过软硬件设计实现了这一系统,希望这一研究内容能够我相关智能小车研究人员带来一定启发。
关键词 AT89S52单片机;智能小车;避障循迹系统
中图分类号 G2 文献标识码 A 文章编号 1674-6708(2017)184-0047-02
智能小车本身属于轮式机器人研究的一个分支,其本身在国内外机器人研究领域都存在着较高关注度,而在本文基于单片机的智能小车避障循迹系统设计展开的研究中,笔者选择了AT89S52单片机作为系统微控制器,并应用了4组QTI红外传感器,而这一设计经过实践验证了该智能小车避障循迹系统的可行性与可靠性。
1 系统总体设计
在本文进行的智能小车避障循迹系统设计中,智能小车避障循迹系统主要由控制电路板、电机、传感器模块、底盘部件等结构组成,图1为本文设计智能小车避的车体结构俯视图,结合该图我们就能够更为直观了解本文的总体设计思路。

在智能小车避障循迹系统的总体设计中,笔者将AT89S52单片机作为这一设计的核心,并通过这一核心进行电源模块、时钟电路、复位电路、传感器模块、伺服电机模块的控制,这其中的伺服电机模块主要用于智能小车的基本巡航动作,而传感器模块则主要用于控制小车沿黑色轨迹线行驶,而通过图1我们能够发现智能小车本身选择了三轮结构车体,这就使得智能小车本身的灵活循迹实现能够得到较好支持[ 1 ]。
2 系统硬件设计
在本文研究的智能小车避障循迹系统硬件设计中,这一设计主要包括伺服电机模块、循迹传感器模块、电源模块等3部分内容。
2.1 伺服电机模块
对于智能小车避障循迹系统硬件的伺服电机模块设计来说,这一设计采用了360°伺服舵机,而这一伺服舵机的选择就使得智能小车避障循迹系统能够实现连续的位置或速度控制。对于伺服电机模块中的360°伺服舵机来说,其本身存有红、黑、白3条输入线,这3条输入线分别负责伺服舵机的电源、接地、信号控制。在智能小车避障循迹系统硬件的伺服电机模块中,其本身还存在着1个基准电路和1个比较器,这一构成就使得伺服电机模块能够更好实现智能小车的控制[ 2 ]。
2.2 循迹传感器模块
对于智能小车避障循迹系统硬件的伺服电机模块设计来说,循迹传感器模块也是这一设计的重要组成之一,而这一循迹传感器模块本身包含着传感器的选择、小车循迹策略两部分部分内容。
2.2.1 传感器的选择
对于传感器的选择这一循迹传感器模块的设计来说,这里笔者选择了QTI传感器用于循迹传感器模块的设计,这一传感器本身属于红外传感器范畴,其本身通过对反射光强度的接收,实现不同颜色物体的探测,而通过探测QTI传感器就能够自动输出不同的电平信号,为智能小车避障循迹的实现提供有力支持[ 3 ]。
2.2.2 小车循迹策略
对于小车循迹策略这一循迹传感器模块设计组成来说,这一设计的实质就是QTI传感器安装位置的选择,这里笔者将QTI传感器的SIG信号线与智能小车平台的相应I/O口进行了连接,并保证了这一连接使用了不同颜色的信号线,这就为后续排查错误等工作的展开提供了有力支持。在小车循迹策略设计中,我们实现了两级方向控制传感器信号的智能小车控制,这种控制设计就使得智能小车能够在两级传感器支持下实现轨迹的较好控制与纠正,这就使得智能小车的循迹可靠性得以较好提升[ 4 ]。
3 系统软件设计
除了硬件设计外,软件设计同样也属于智能小车避障循迹系统的重要组成,这一设计主要包括机器人基本动作实现、循迹功能的实现两部分内容。
3.1 机器人基本动作实现
对于智能小车避障循迹系统软件设计的机器人基本动作实现中,我们首先需要考虑智能小车运行时轮子的旋转情况,这里我们以智能小车的前进为例,智能小车前进时从左轮看该轮为逆时针旋转,而从右轮看则恰恰相反,而由此我们就能够得出智能小车运行方向和速度情况,通过改变智能小车车轮的参数控制,就能够实现智能小车的加减速控制。
结合智能小车车轮参数控制、加减速控制的相关认知,笔者在C语言设计中将智能小车的两个车轮速度作为形式参数,并应用left与right进行了定义,这样我们就能够顺利完成机器人基本动作实现这一智能小车避障循迹系统软件设计。
3.2 循迹功能的实现
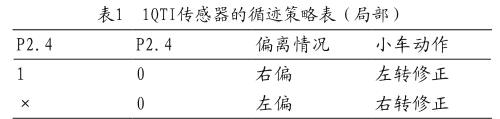
在智能小车避障循迹系统软件设计的循迹功能实现中,想要实现智能小车避障循迹系统软件设计的循迹功能,我们首先需要得出QTI传感器的循迹策略表,这样才能够通过调用move函数实现基于QTI传感器的智能小车自主循迹,表1为QTI传感器的循迹策略表局部,而结合该表我们能够发现结合这一思路,我们就能够实现智能小车不同循迹功能的扩展,不过介于篇幅原因,本研究不予详细论述[ 5 ]。
4 结论
在本文就基于单片机的智能小车避障循迹系统设计展开的具体研究中,笔者对这一智能小车避障循迹系统的总体设计、硬件设计、软件设计进行了详细论述,而结合这一系列论述完成的设计在实际的测试证明中取得了智能小车运行灵活、可靠、稳定、识别能力较强的结果,但具体测试中笔者也发现QTI传感器的安装高度出现问题会直接影响智能小车的无法巡线或抖动厉害的情况出现,而智能小车全速行驶突然停下很容易导致翻车问题的出现,用于轨迹引导的线颜色较淡时智能小车的避障循迹往往容易出现问题,这几点需要引起大家重视。总之,本文基于單片机的智能小车避障循迹系统设计展开的研究具备着较高的可行性,希望能够为相关研究人员带来一定启发。
参考文献
[1]顾群,蒲双雷.基于单片机的智能小车避障循迹系统设计[J].数字技术与应用,2012(5):23.
[2]陈海洋,李东京.基于单片机的智能循迹避障机器人小车设计[J].科技风,2014(20):99.
[3]钱栢霆,李娟.基于单片机的循迹避障智能小车系统的设计[J].电子制作,2015(6x).
[4]寸巧萍.基于Mega16单片机的智能小车循迹避障设计方案[J].电子技术与软件工程,2015(18):258.
[5]陈梦婷,胡白燕,黄璨.基于单片机的智能循迹避障小车的设计与实现[J].智能机器人,2016(4):47-51.
- 1100TEU集装箱船船体监造要点分析
- 船用组合锅炉维修及其管理
- MAN双燃料四冲程柴油机的油/气混烧模式及应用
- 新型深水非接触式海管后挖沟技术应用
- 对海上数字广播系统(NAVDAT)技术的研究
- 一起柴油机机架汽蚀事故的原因分析及预防措施
- 上海自贸区下航运政策的现状与未来
- 引航员常用移动助航软件比较
- 用EXCEL解析集装箱装载EDI数据文件
- 改正通告检查中若干问题的分析研究
- 船舶碰撞灯浮的原因浅析及对策建议
- 浮标漂失关键性因素分析及控制
- 高强度轻型顶标的研制与应用
- 1100TEU集装箱船船体监造要点分析
- 船用组合锅炉维修及其管理
- 一起柴油机机架汽蚀事故的原因分析及预防措施
- 上海自贸区下航运政策的现状与未来
- MAN双燃料四冲程柴油机的油/气混烧模式及应用
- 引航员常用移动助航软件比较
- 新型深水非接触式海管后挖沟技术应用
- 用EXCEL解析集装箱装载EDI数据文件
- 对海上数字广播系统(NAVDAT)技术的研究
- 改正通告检查中若干问题的分析研究
- 船舶碰撞灯浮的原因浅析及对策建议
- 浮标漂失关键性因素分析及控制
- hurrays
- hurricane
- hurricanes
- hurricane/typhoon
- hurried
- hurriedly
- hurriedness'
- hurriedness
- hurriednesses
- hurriedness's
- hurriers
- hurries
- hurry
- hurrygraph
- hurrying
- hurryingly
- hurry sb up
- hurry through/rush through
- hurry up
- hurry up with
- hurry up (with sth)
- hurry²
- hurry¹
- hurt
- hurtable
- 破釜沉船
- 破釜焚舟
- 破釜生鱼
- 破鉴
- 破钞
- 破钱
- 破铁捧金
- 破铜烂铁
- 破铜烂铁当武器
- 破铜烂铁当武器——打烂仗
- 破铜锣
- 破铺叉味儿
- 破锅熬坏铁梁筲
- 破锅难锔,漏房难补
- 破锣
- 破锣嗓子唱山歌
- 破锣嗓子唱山歌——不入调
- 破镜
- 破镜不重照,落花难上枝。
- 破镜分钗
- 破镜重合
- 破镜重圆
- 破镜重完
- 破镜重归
- 破镜钗分