张胜男 谢治虢 张嘉航 张进 刘天飞
摘要:针对大多数工地施工升降机存在的成本高、施工效果不好、应用不方便等问题,文章提出一种基于ARM技术的施工升降控制系统,该系统以STM32F103为主控制器,通过软件编程实现施工升降机的自动控制。经实验验证,该系统参数功能达到设计要求,较大改善现有升降控制器存在的操作精度低、应用不便及成本高等问题,既保证了施工的安全,又可以降低施工费用,增加工作效率,适合大规模推广使用。
关键词:嵌入式技术;STM32F103微控制器;升降控制器
目前,在一些建筑施工和工厂生产中,以建筑卷扬机和施工升降机等建筑货运电梯为代表的垂直升降机械扮演着重要的角色。利用这类设备可以将物料和施工人员在地面和各楼层间输送。在建筑工地和工厂生产中普遍采用的是卷扬机控制的方法,定位精度差,劳动强度大,因此有必要采用具有自动控制功能的施工升降机。
嵌入式微控制器体积小,结构紧凑,可作为一个部件埋藏于所控制的装置中,完成信号控制的功能。为了适应不同的应用需求,一般一个系列的单片机具有多种衍生产品,每种衍生产品的处理器内核相同,存储器和外设的配置及封装不尽相同,这样可以最大限度地与应用需求相匹配,从而减小产品的功耗和成本。
本文提出一种基于ARM技术的施工升降控制系统,该系统利用嵌入式微控制器体积小、结构紧凑、功耗及成本较低、特别适合于信号控制的特点,设计了一种易于推广的、参数功能能够达到示范要求的升降自动控制系统,它以嵌入式电路为控制器核心,采用嵌入式芯片为将来扩展功能预留了丰富的接口,外围辅以驱动电机电路及电源电路,完善电路设计,并进行软件设计,增强了系统的可靠性,实现了物料及施工升降机的自动控制,改善人工控制升降设备存在的操作精度低、应用效果差等问题。
1 系统设计方案
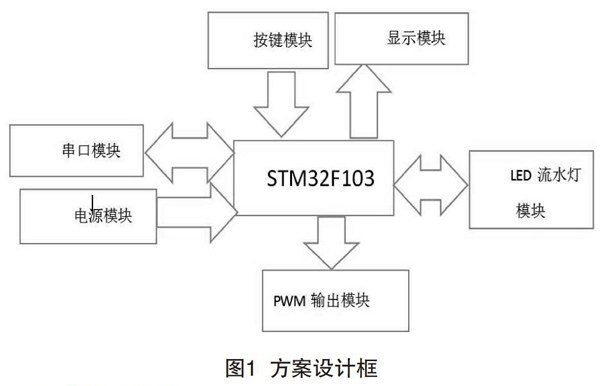
本系统以STM32嵌入式系统为核心,从硬件和软件两个方面进行设计实现物料及施工升降机的自动控制。系统工作逻辑如下:通过按键来控制电机正反转表示开门和关门,通过软件编程实现对液晶显示器(Liquid Crystal Display,LCD)的显示和流水灯的控制,并用流水灯表示上行方向和下行方向。建筑升降机通过按键设定到达指定的工作平台,双路脉冲宽度调制(Pulse Width Modulation,PWM)输出分别控制升降机上下行运行和开关门动作,LED流水灯模拟升降机运行方向。
系统方案设计如图1所示,主要包括嵌入式芯片STM32F103、按键模块、显示电路模块、串口模块、电源模块、PWM输出模块、LED流水灯模块。显示电路以1个逻辑门电路(Transistor-Transistor Logic,TTL)液晶显示屏为核心构成。
2 硬件电路设计
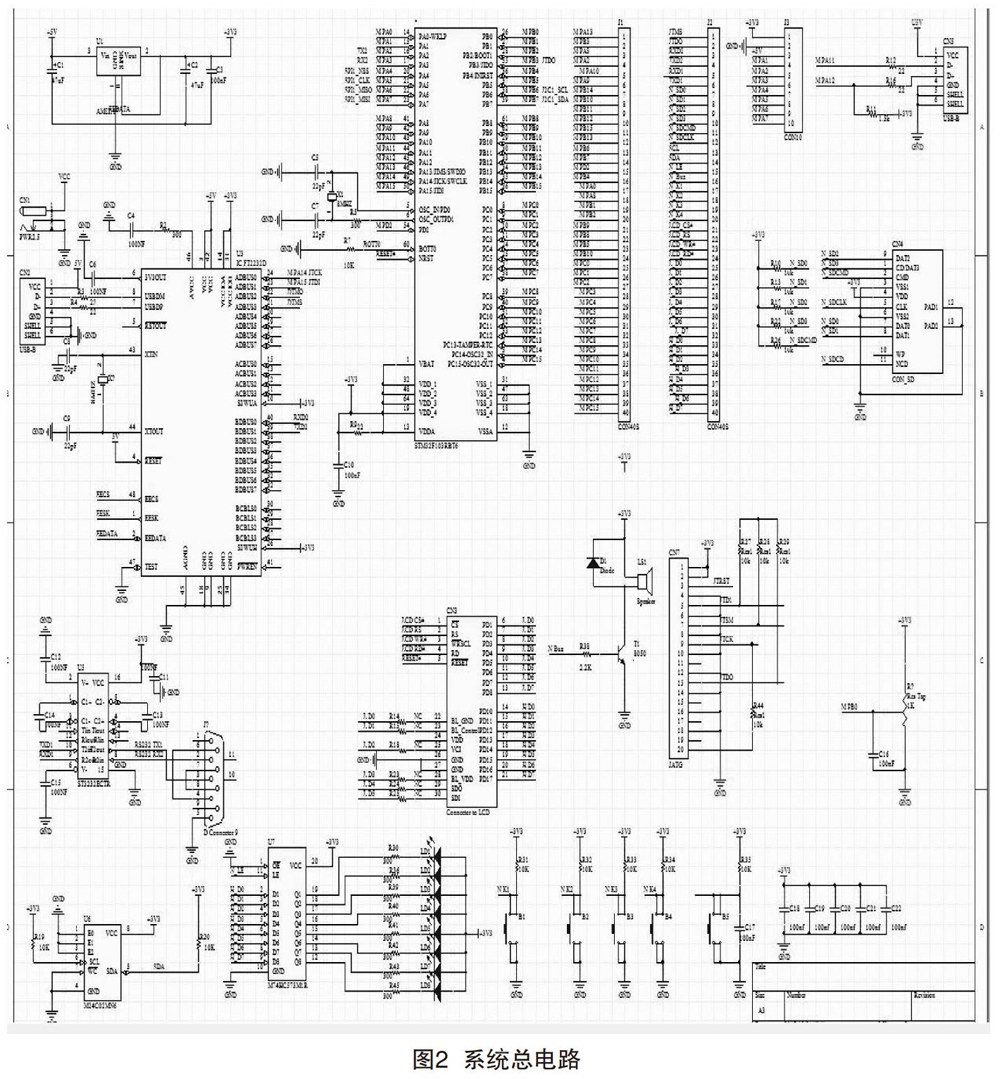
具体电路如图2所示,两路PWM输出接两个小的5 V电机来表示开门上下行;上下行接流水灯,上行亮,下行灭;开关门接电机,正转开,反转关;显示用TTL液晶显示。
由于嵌入式系统最小系统是经典电路,在各类参考书中均可查到,此处不再介绍,以下主要介绍按键模块、显示电路模块、PWM输出模块、LED流水灯模块电路设计。
2.1 LCD显示
LCD显示时钟和当前所在工作平台。当升降机运行到目标平台时,平台数字在1 s内闪烁2次。系统上电后升降机默认位于平台1,升降机门默认为打开状态。
2.2 按键功能
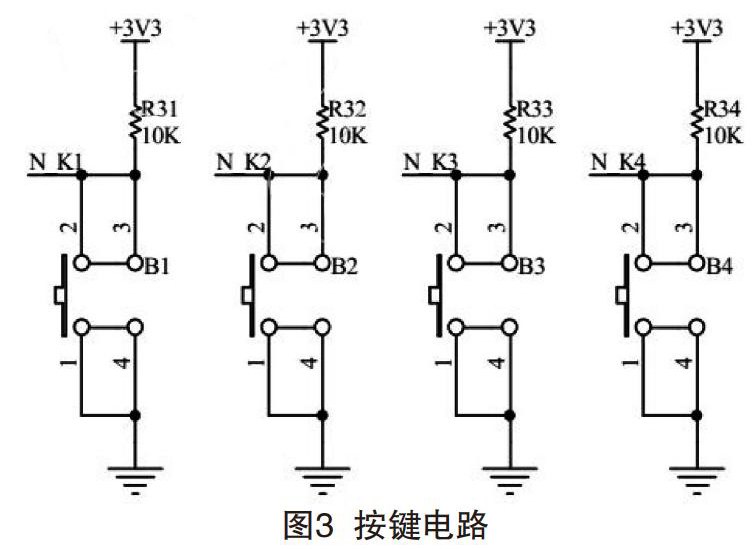
按键电路如图3所示,用4个按键分别代表4个工作平台。按下后通过点亮LED指示要到达的平台(LD1-LD4,LD1对应平台1,依此类推)。当升降机到达目标平台时,对应LED灯熄灭。按下当前平台对应的按键无效。一次可以设定多个目标平台,上下平台都有按键时,运行顺序是先上后下。在最后一次按键按完1 s之后,模拟电机开始运行:升降机先关门,运行到下一层后开门;如果还有目标平台,则开门后停留2 s,然后关门,继续运行到下一个目标平台,直到没有目标平台。当设置多个目标平台时,升降机的升降顺序与按键顺序无关,先按从低到高的顺序走完设定的上行平台,再按从高到低的顺序走完设定的下行平台。电机运转期间按键无效。
2.3 PWM输出
PWM电路如图4所示,两路PWM输出分别控制上下行电机(PA6)和开关门电机(PA7),并分别用一路方向控制信号控制电机的运转方向。PA4高电平表示升降机上行,反之表示升降机下行。PA5高电平表示升降机开门,反之表示关门。上下每层平台的电机运行时间为6 s,升降机开关门时间为4 s。上下行电机控制信号的频率为1 kHz。升降机上行时,PWM信号占空比为80%;升降机下行时,PWM信号占空比为60%。开关门电机控制信号的频率为2 kHz。升降机开门时,PWM信号占空比为60%;升降机关门时,PWM信号占空比为50%。
2.4 LED流水指示
升降机上下行时,4个LED(LD5-LD8)组成流水灯用来表示升降机的运行方向。设计中需合理选择流水灯的流水方式和时间间隔,如图5所示。
3 系统软件设计
系统软件设计如图6所示,系统在上电初始化后显示时钟和当前所示平按下目标平台按键后,相应的LED灯会点亮,加上延时子程序,延时1 s后运行到目標平台的最上平台,开门。平台数字在1 s内闪烁2次,平台对应LED熄灭。当有剩余目标平台时,开门后停留2 s,然后关门,没有目标平台时结束。两路PWM输出接两个小的5 V电机来表示开门上下行,然后用流水灯表示上行方向和下行方向,流水灯往上走,表示上行,流水灯往下走,表示下行方向。电机正反转表示开门和关门,正转就代表开门,反转就代表关门。
4 样品调装
具体电路调试前应先检查电路,对照着电路图,按一定的顺序逐级逐步进行检查。注意电源连接,电源与地的连接,二极管的方向和电解电容的极性是否接反,集成电路与晶体管的引脚连接,观察焊点是否焊牢固,有没有虚焊等。按照信号的流向,对每一个模块分别进行调试,完成每个模块调试后,再进一步扩大调试范围,最后完成总的调试。
经过PROTEUS和keil C软件调试和联调,完成产品,下一步进行系统综合调试。系统刚上电时的情况如图7所示,系统显示初始界面,通过按键可以对其进行调整。
5 结语
随着建筑业的发展,对施工升降机的安全性、方便性要求越来越高,电子控制技术的发展也为施工升降机的发展带来可能。通过应用STM32芯片为核心控制元件,结合其他模块对施工升降进行自动控制,这样更能满足施工升降机的安全需要。本文基于ARM技术设计的一种施工升降控制系统,采用嵌入式芯片为主控芯片,为将来扩展功能预留了丰富的接口,从可靠性出发,进一步完善电路设计,并进行软件设计,各项参数功能均达到了设计要求。由于本系统采用价格低廉、资源丰富的STM32F103芯片,其他材料也都采用常见的电子元件,造价低,控制方便、安全可靠,完全满足施工现场的要求。经过实地验证,效果良好,适合工地推广应用。
[参考文献]
[1]王绍伟,郑德志,吴玉勇.嵌入式微系统[M].北京:机械工业出版社,2016.
[2]马维华.嵌入式系统原理及应用[M].北京:北京邮电大学出版社,2017.
[3]李广军,林水生.微处理器系统结构与嵌入式系统设计[M].北京:电子工业出版社,2011.
[4]王剑.嵌入式系统设计与应用[M].北京:清华大学出版社,2017.
[5]路莹.嵌入式系统开发设计与应用[M].北京:清华大学出版社,2011.
- 关于儿童分享的秘密
- 从历史课看美国高中课堂的组织与管理
- 法国普通业士考试研究述评
- 历史与现实的“在场”
- 浅谈积累数学思考经验的“三个关注”
- 在物理教学中培养学生批判质疑的习惯
- 小学课堂生成性资源的有效利用
- 小说阅读“圈点批注”教学法的实践探索
- 基于课文的“读写结合”式作文教学
- 探究小学生有效说话训练的方式
- 让英语学困生走出心理阴影
- 宁夏灵武市精准扶贫教育出实招 护航贫困学子求学路
- 贵州省盘县以“四在学校·幸福校园”活动为抓手推进义务教育均衡发展
- 四川省中江县以“四个强化”抓好学校食堂食品安全工作
- 广东省义务教育质量监测试验工作总结分析研讨会召开
- 教学反思能力:数学教师专业发展的重要本原
- 把握四大观念 设计教学目标
- 构建机制 和谐共育 开创家庭教育工作新局面
- 滇西边境山区中小学教师教育科研认同状况的调查研究
- 思维图在美国小学英语教学中的应用
- 芬兰教师专业伦理建设研究
- 借人之智 成人之美
- “互联网+”开启阅读新模式
- “创”赢未来 “客”出梦想
- 方寸之间 稳如泰山
- staled
- stalely
- stalemate
- stalemated
- stalemates
- stalemating
- staleness
- stalenesses
- staler
- stales
- stalest
- staling
- stalish
- stalk
- stalkable
- stalked
- stalker
- stalkers
- stalkier
- stalkiest
- stalking
- stalkingly
- stalkings
- stalkless
- stalk-like
- 跟着高人长见识
- 跟着黄鼠狼学偷鸡
- 跟着龙王吃贺雨
- 跟着龙王吃贺雨——帮凶
- 跟礼服相配的帽子
- 跟祸事最接近的人首先遭殃
- 跟究
- 跟缉
- 跟羊羔齐息,随云雀同起
- 跟老和尚念一年经,不如听如来佛一句话有用
- 跟老虎讨交情的,早晚是喂了老虎
- 跟脚
- 跟脚儿
- 跟舌头转
- 跟虎进山,跟鹰飞天
- 跟行为的主体处于相对地位的一方
- 跟诸葛亮学本事
- 跟诸葛亮学的本事——能掐会算
- 跟贴
- 跟赶
- 跟趟儿
- 跟足
- 跟趾
- 跟踪
- 跟踪前进