赫焕丽++贾丽仕
摘要:水位控制系统具有非线性、非最小相位、时滞性,难以建立精确的数学模型。该文采用位式控制算法分析水位变化规律。通过MCGS组态软件的数据报表和曲线分析水位的动态变化周期。
关键词:水位控制;组态控制;控制系统
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2017)03-0232-02
储液罐给水流量和出水流量都存在测量误差,测量误差、蒸发作用、进水管进水使水位控制具有时滞性,调节螺丝、滑轮长期动作及暴露在空气中的生锈造成机械控制不灵敏,输送管道和控制机构存在摩擦等非线性因素,随着日久摩擦不断变化,造成附加的稳态误差。水位控制具有纯滞后和容量滞后的现象,水位上升时间长且不匀速。为了提供平稳的水位,需要进行充分可靠的给水出水调节。
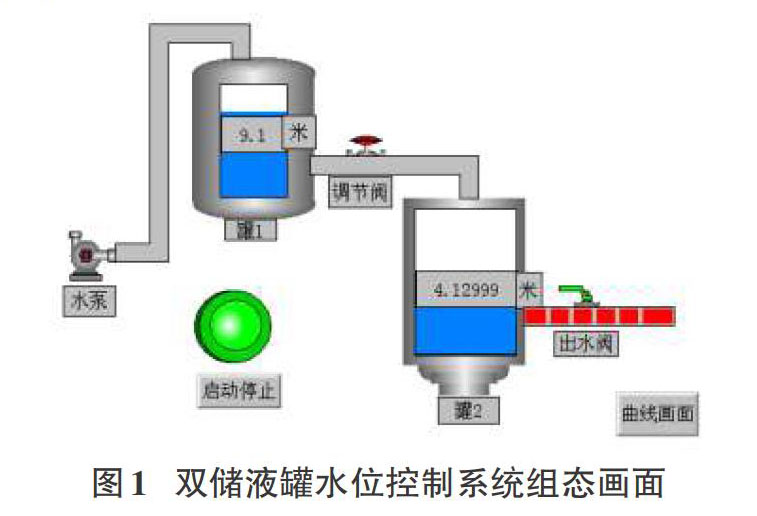
1 双储液罐水位控制组态画面
图1是双储液罐水位控制系统,要求按下启动停止按钮,只要罐2水位大于6米,保证持续出水。罐1水位在1到9米之间波动,罐2水位在1到6米之间波动。罐1量程是12米,罐2量程是8米。
2位式控制算法思路
位式控制算法精度差,仅限于对控制品质要求不高的场合,不能连续变化,只能断续控制。当罐1水位低于1米时,泵开启;当罐1水位高于1米低于9米时,泵保持状态,它的状态取决于前个动作状态;当罐1水位高于9米时,泵关闭。对于泵的状态用数学公式表达:
同理,阀1的状态是当罐2水位低于1米时打开,在1米到6米之间保持,高于6米,阀1关闭。阀3的状态是要保证恒定出水,当罐2水位达到6米后,阀1关闭,阀2打开。阀1总在通和断之间切换,水位在上下限之间不停地波动。
自动控制水泵、调节阀和出水阀的脚本程序如下:
4数据前处理
从硬件设备中输入输出的数据一般是电压或电流值,要对这些数据进行相应转换,得到具有实际意义的工程数据。有两种硬件作为接口设备,一种是可编程控制器,一种是板卡。当使用板卡时需要对设备采集通道的数据进行前处理。使用PLC需要通过编程转换数据。
4.1使用西门子PLC数据预处理
通过压力变送器把液位转换为4~20mA电流信号,H1和H2经AIW0和AIW1进入PLC,得到6400~32000的数字量H1D和H2D,经过程序处理还原为水位H1和H2。
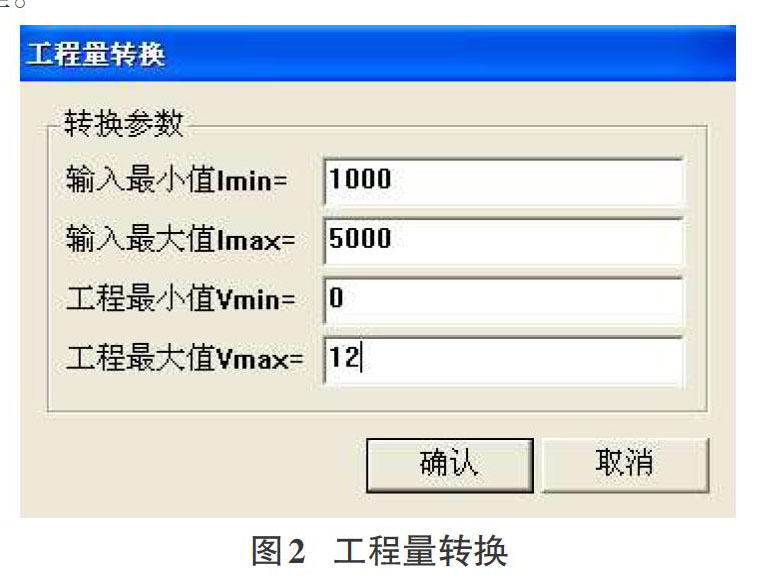
4.2使用板卡数据预处理
板卡作为接口设备,不需要写入程序,只需要进行填表格就可以进行数据转换了。如图2把1到5伏的电压值转换成0到12米的液位。双储液罐自动水位控制系统通过压力变送器把罐1或罐2的液位检测出来,把压力信號转换成1~5V的电压。电流通过板卡输入接口进行处理转换为数字量送到计算机处理。
5分析水位变化总结规律
安装好MCGS组态软件,建立“水位控制系统”工程。首先建立5个变量:H1、H2、泵、调节阀、出水阀。
在用户窗口建立“水位控制主画面”窗口,并设置为启动窗口。把所有部件进行动画连接,在运行策略中输入如下液位模拟程序。
进入运行环境,观察水位随泵和阀的变化效果。出水阀打开后,储液罐水位在上下限之间不停波动,进水阀总在通与断之间不停切换,水位不能稳定下来。进水阀和水泵动作非常频繁,对执行器寿命非常不利。若罐2水位高于6米,出水阀保证持续供水,不影响用户使用。
参考文献:
[1] 周佳.曹小玲,刘永文.锅炉汽包水位控制策略的现状分析[J].锅炉技术,2005,36(3).
[2] 吴文红.基于PLC的PID算法在恒水位控制上的实现[J].微计算机信息,2008,24(1).
[3] 王瑞云.基于PLC控制的船用锅炉水位控制系统的分析[J].船电技术, 2013,33(4).
[4] 张耀,张大发.基于可编程控制器的稳压器压力水位控制研究[J].核动力工程,2008,29(2).
- 浅谈初中语文教学中的教学机智
- 激发学生学习兴趣 优化语文课堂教学
- 新形势下高校后勤基层党组织建设的方法与策略
- 阅读中丰学养润童心
- 如何提高小学生的英语学习兴趣
- 初中道德与法治课程落实小组合作的有效策略
- 新形势下如何进行初中信息技术教学分析
- 如何提升小学生数学学习兴趣框架构建
- 体育游戏在小学体育中的应用探讨要素探索
- 群文阅读引领下的新型语文课堂
- 对提高初中语文教学有效性的研究
- 巧辟蹊径,让孩子们在故事中成长
- 生活化教学在小学数学教学中的运用
- 探究式教学在初中物理教学中的实践研究
- 高中班主任管理艺术
- 守望三尺讲台 耕耘教育梦想
- 如何上好校本课程课
- 青春在奋斗中开花
- 小学班主任有效开展德育工作研究
- 如何培养孩子的自我控制能力
- “转移法”让幼儿新生轻松度过适应期
- 幼儿园户外活动安全隐患及预防对策研究
- 强化园本研训措施,促进师幼自主发展
- 把幼儿一日活动的权利交给孩子
- 培养小班幼儿生活自理能力的方法探究
- 妒忌
- 威胁
- 婴儿
- 孔
- 存在
- 存钱
- 孤独
- 学习
- 学校/大学
- 孩子
- 安全
- 安慰
- 安排
- 安静
- 完全
- 完成
- 完整/不完整
- 完美
- 宗教
- 实际上
- 审判
- 害怕
- 害羞
- 家
- 家庭
- 江淹才退
- 江淹梦笔
- 江淹梦锦
- 江淹浦
- 江淹笔
- 江渚
- 江渡
- 江湄
- 江湖
- 江湖一把伞,容吃不容攒
- 江湖一点诀,不对妻儿说
- 江湖义气
- 江湖人生
- 江湖会的是有缘人
- 江湖佬卖假药——招摇撞骗
- 江湖佬耍猴子——名堂多
- 江湖医生
- 江湖十二脚色
- 江湖卖膏药——光耍嘴皮子
- 江湖变桑田古道
- 江湖小集
- 江湖心
- 江湖戏班
- 江湖水面上笼罩着的一望无边的茫茫烟雾
- 江湖水面烟雾笼罩,广阔无边