摘 要: 针对常规的SAR/GMTI系统中,方位向速度过大产生的速度模糊问题,提出一种双波段融合解速度模糊算法。首先分别在各个波段下进行目标运动参数估计,然后根据各个波段下的最大可检测速度得到两个测速集合,搜索两个集合的交集得到估计的模糊速度。在不提高硬件要求和不损失估计精度的情况下,该方法可以有效地解决方位向上的速度模糊问题。理论分析和计算机仿真结果验证了该方法的有效性。
关键字:SAR/GMTI系统; 运动参数; 模糊速度; 双波段融合
中图分类号: TN911?34 文献标识码: A 文章编号: 1004?373X(2015)10?0032?04
0 引 言
动目标检测和参数估计是合成孔径雷达(SAR)的难点和热点问题[1?3]。地面动目标检测(GMTI)技术可以检测地面运动目标,SAR/GMTI模式可以将动目标和SAR图像背景结合在一起[4]。三通道DPCA是SAR/GMTI系统中最经典的系统[5],能有效提高运动目标检测和参数估计性能,但同时也带来了盲速和速度模糊的问题,这是因为干涉相位以2π为周期,所以随着目标径向速度的增大而有可能出现折叠,大大影响了系统对运动目标的测速和定位[6]。针对盲速和速度模糊的问题,利用了天线斜置,放置天线不同间隔的方法[2,6],可以初步解决速度模糊问题,但对硬件要求较高。利用信号的幅值和相位信息可以去解决速度模糊,以及利用子孔径之间的相关性也可以消除模糊问题[7?8],当缩小天线之间的间隔时,可以增大模糊速度的上限,但对于慢速弱目标的响应会变差。另外利用子孔径的相关性会缩小合成孔径时间,降低了结果的精度。
速度模糊是由于多通道的体制原因所产生的,为此在不损失原有多通道DPCA参数估计的检测精度的情况下,可以在原有的基础上增加自由度解决速度模糊的问题。由于不同的波长下速度模糊的区间有所不同,可以在双波段的模式下解速度模糊。本文主要研究在GMTI模式下运动目标的检测和定位,通过双波段融合在不损失测速精度和不增加硬件要求的情况下解决三通道DPCA系统中存在的盲速和速度模糊问题。
1 三通道DPCA模型
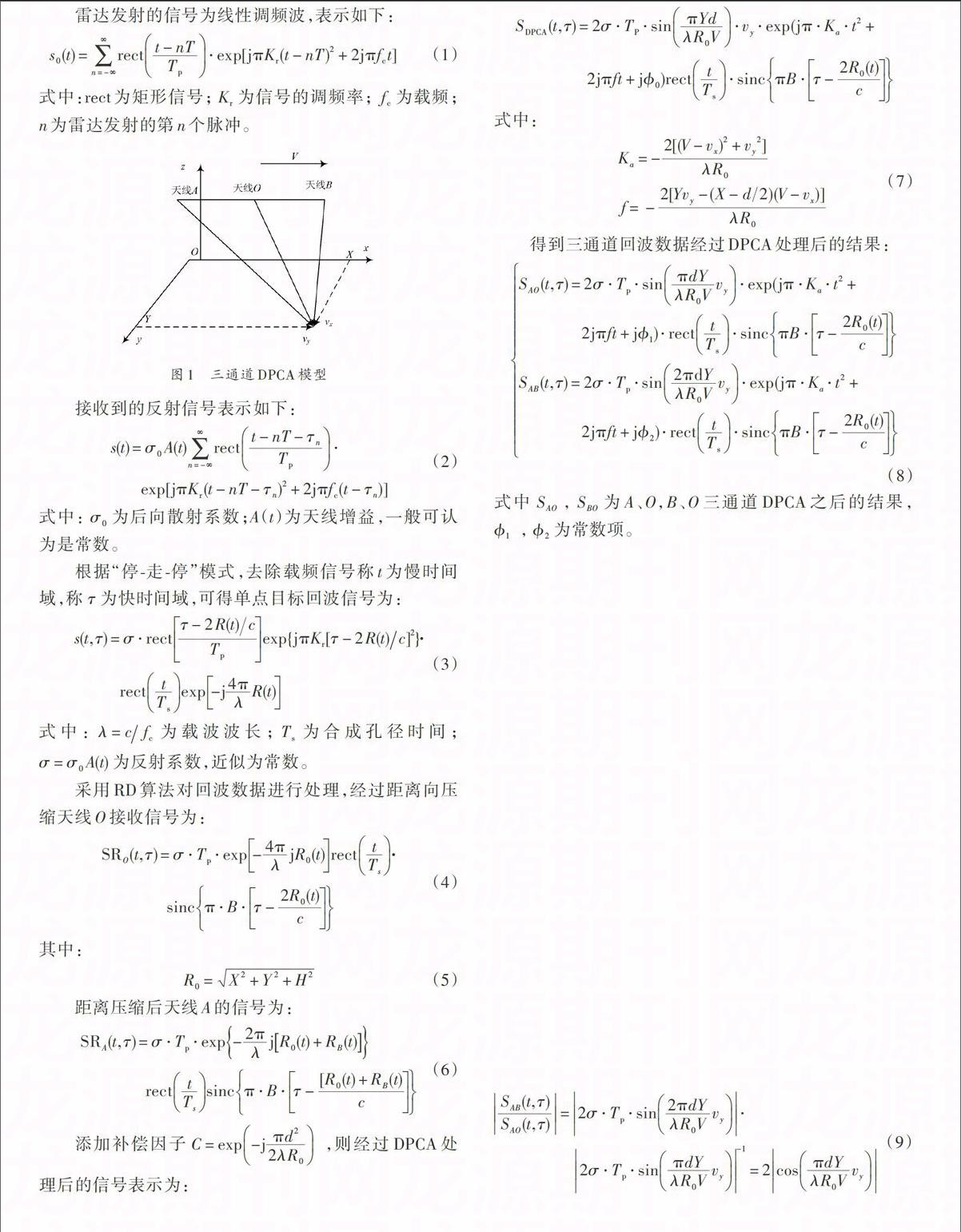
假设三通道天线的收发模式如图1所示,采用单孔径发射,三孔径同时接收。SAR处于正侧式工作状态,中间天线O发射脉冲重复周期为T的调频信号,天线A、B和O分别接收回波信号,相邻天线AO与BO相等,且满足DPCA条件d=2nTV。V为载机飞行速度,H为载机飞行高度,(X,Y,O)为动目标的初始位置,[vx],[vy]分别为动目标的方位向速度和距离向速度。考虑到GMTI的关键是方位向信号处理,因此在原始数据域上的DPCA是经过距离压缩之后,进行杂波抑制的。
雷达发射的信号为线性调频波,表示如下:
[s0(t)=n=-∞∞rectt-nTTp?exp[jπKr(t-nT)2+2jπfct]] (1)
式中:rect为矩形信号;[Kr]为信号的调频率;[fc]为载频;n为雷达发射的第n个脉冲。
图1 三通道DPCA模型
接收到的反射信号表示如下:[s(t)=σ0A(t)n=-∞∞rectt-nT-τnTp? exp[jπKr(t-nT-τn)2+2jπfc(t-τn)]] (2)
式中:[σ0]为后向散射系数;A(t)为天线增益,一般可认为是常数。
根据“停?走?停”模式,去除载频信号称t为慢时间域,称[τ]为快时间域,可得单点目标回波信号为:[s(t,τ)=σ?rectτ-2R(t)cTpexp{jπKr[τ-2R(t)c]2}· recttTsexp-j4πλR(t)] (3)
式中:[λ=cfc]为载波波长;[Ts]为合成孔径时间;[σ=σ0A(t)]为反射系数,近似为常数。
采用RD算法对回波数据进行处理,经过距离向压缩天线O接收信号为:
[SRO(t,τ)=σ?Tp?exp-4πλjR0(t)recttTs· sincπ?B?τ-2R0(t)c] (4)
其中:
[R0=X2+Y2+H2] (5)
距离压缩后天线A的信号为:
[SRA(t,τ)=σ?Tp?exp-2πλjR0(t)+RB(t) recttTssincπ?B?τ-[R0(t)+RB(t)c] (6)
添加补偿因子[C=exp-jπd22λR0] ,则经过DPCA处理后的信号表示为:
[SDPCA(t,τ)=2σ?TP?sinπYdλR0V?vy?exp(jπ?Ka?t2+ 2jπft+j?0)recttTs?sincπB?τ-2R0(t)c] 式中:
[Ka=-2[(V-vx)2+vy2]λR0f=-2[Yvy-(X-d2)(V-vx)]λR0] (7)
得到三通道回波数据经过DPCA处理后的结果:
[SAO(t,τ)=2σ?Tp?sinπdYλR0Vvy?exp(jπ?Ka?t2+ 2jπft+j?1)?recttTs?sincπB?τ-2R0(t)cSAB(t,τ)=2σ?Tp?sin2πdYλR0Vvy?exp(jπ?Ka?t2+ 2jπft+j?2)?recttTs?sincπB?τ-2R0(t)c] (8)
式中[SAO],[SBO]为A、O,B、O三通道DPCA之后的结果,[?1] ,[?2]为常数项。
2 双波段解速度模糊
上面给出了三通道DPCA的模型,这里所做的DPCA是在距离多普勒域进行的,经过DPCA处理之后得到的信号近似为线性调频波,对该信号所携带的信息进行分析可以得到动目标的位置和速度。因此本文提出了在双波段分别进行运动目标的参数估计,通过所得到的结果进行融合,在双波段的模式下解速度模糊。
2.1 单波段三通道DPCA参数估计
把上面得到的两路信号提取出来,检测出[R0]同时求出多普勒调频率[Ka]和中心频率[f。]求中心频率使用的方法是杂波锁定法,杂波锁定法[9]就是求出信号的功率谱密度,功率谱密度对应的频率就是中心频率。在求多普勒调频率时使用的是子孔径相关法,子孔径相关法[9]是将孔径在频域上分成两个子孔径,由于chirp信号的频率随时间变化的特性,求两个子孔径的成像之后的相关系数,确定条频率的差值,然后进行下次迭代,直到求出的调频率达到要求。这样就得到3个参数,为了实现估计还需要一个参数,本文采用的是文献[1]当中提出的两路信号的幅值相比的方法即:
[SAB(t,τ)SAO(t,τ)=2σ?Tp?sin2πdYλR0Vvy? 2σ?Tp?sinπdYλR0Vvy-1=2cosπdYλR0Vvy] (9)
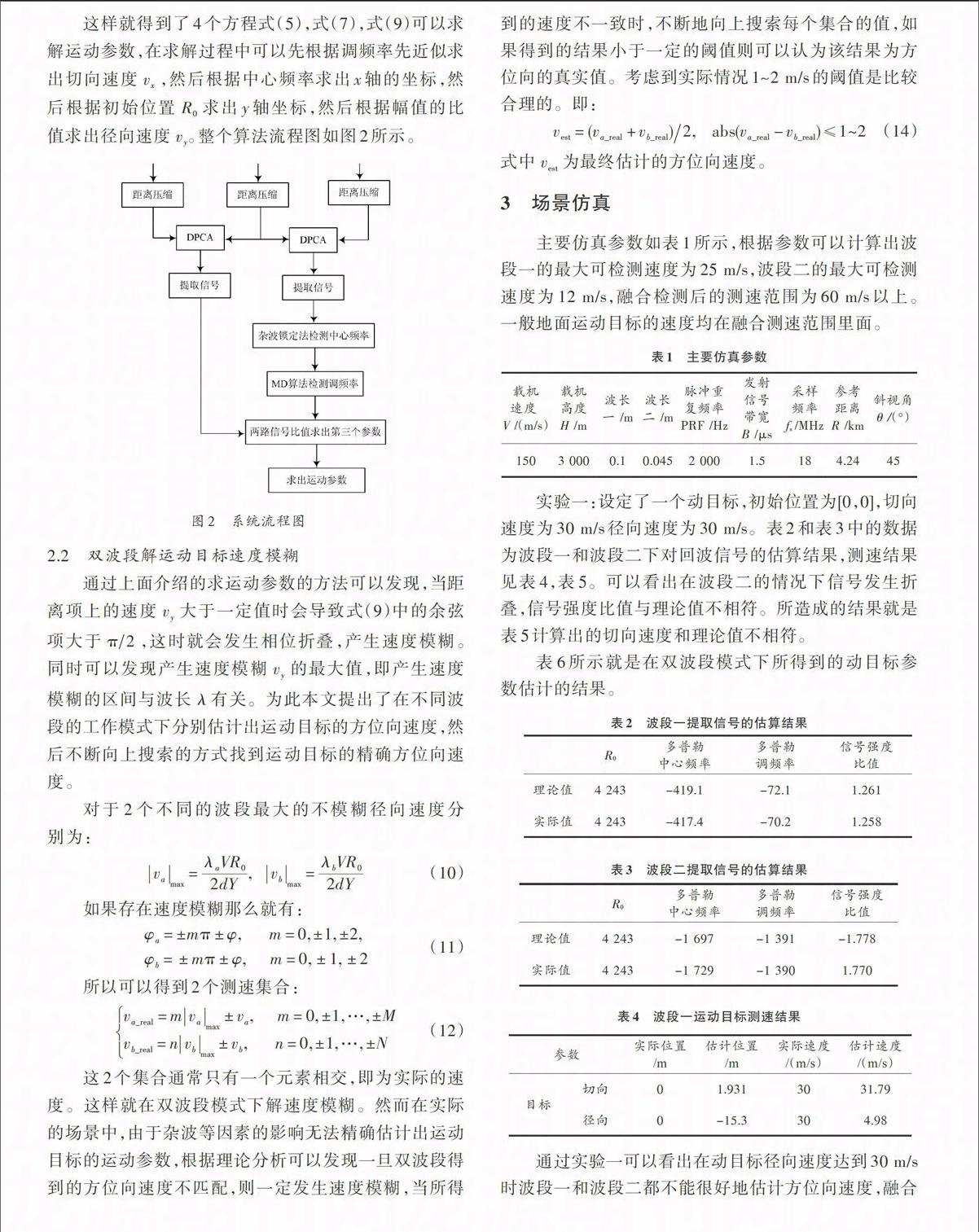
这样就得到了4个方程式(5),式(7),式(9)可以求解运动参数,在求解过程中可以先根据调频率先近似求出切向速度[vx],然后根据中心频率求出x轴的坐标,然后根据初始位置[R0]求出y轴坐标,然后根据幅值的比值求出径向速度[vy。]整个算法流程图如图2所示。
图2 系统流程图
2.2 双波段解运动目标速度模糊
通过上面介绍的求运动参数的方法可以发现,当距离项上的速度[vy]大于一定值时会导致式(9)中的余弦项大于[π2],这时就会发生相位折叠,产生速度模糊。同时可以发现产生速度模糊[vy]的最大值,即产生速度模糊的区间与波长[λ]有关。为此本文提出了在不同波段的工作模式下分别估计出运动目标的方位向速度,然后不断向上搜索的方式找到运动目标的精确方位向速度。
对于2个不同的波段最大的不模糊径向速度分别为:
[vamax=λaVR02dY, vbmax=λbVR02dY] (10)
如果存在速度模糊那么就有:
[φa=±mπ±φ, m=0,±1,±2,φb=±mπ±φ, m=0,±1,±2] (11)
所以可以得到2个测速集合:
[va_real=mvamax±va, m=0,±1,…,±Mvb_real=nvbmax±vb, n=0,±1,…,±N] (12)
这2个集合通常只有一个元素相交,即为实际的速度。这样就在双波段模式下解速度模糊。然而在实际的场景中,由于杂波等因素的影响无法精确估计出运动目标的运动参数,根据理论分析可以发现一旦双波段得到的方位向速度不匹配,则一定发生速度模糊,当所得到的速度不一致时,不断地向上搜索每个集合的值,如果得到的结果小于一定的阈值则可以认为该结果为方位向的真实值。考虑到实际情况1~2 m/s的阈值是比较合理的。即:
[vest=(va_real+vb_real)2, abs(va_real-vb_real)≤1~2] (14)
式中[vest]为最终估计的方位向速度。
3 场景仿真
主要仿真参数如表1所示,根据参数可以计算出波段一的最大可检测速度为25 m/s,波段二的最大可检测速度为12 m/s,融合检测后的测速范围为60 m/s以上。一般地面运动目标的速度均在融合测速范围里面。
表1 主要仿真参数
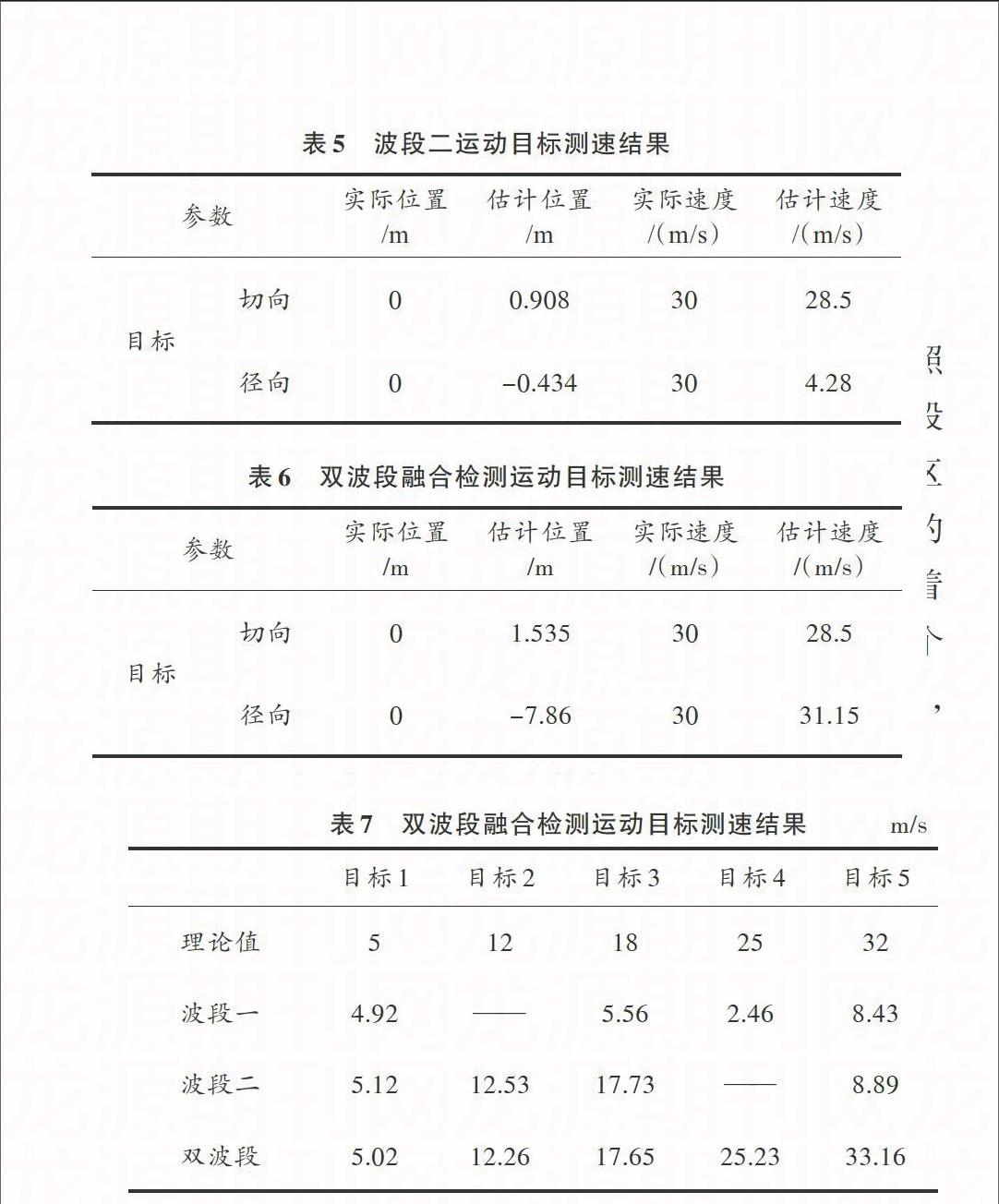
实验一:设定了一个动目标,初始位置为[0,0],切向速度为30 m/s径向速度为30 m/s。表2和表3中的数据为波段一和波段二下对回波信号的估算结果,测速结果见表4,表5。可以看出在波段二的情况下信号发生折叠,信号强度比值与理论值不相符。所造成的结果就是表5计算出的切向速度和理论值不相符。
表6所示就是在双波段模式下所得到的动目标参数估计的结果。
表2 波段一提取信号的估算结果
表3 波段二提取信号的估算结果
表4 波段一运动目标测速结果
通过实验一可以看出在动目标径向速度达到30 m/s时波段一和波段二都不能很好地估计方位向速度,融合之后可以得到较为精确的估计。
表5 波段二运动目标测速结果
表6 双波段融合检测运动目标测速结果
实验二:下面设置几个动目标,其方位向速度按照由小到大,分别置于波段一和波段二的正常区间、波段一的盲速区和波段二的正常区间、波段一的速度模糊区间和波段二的正常区间、波段一的模糊区间和波段二的盲速区、波段一和波段二共同的速度模糊区。观测随着方位向速度的不断增大运动目标参数估计的结果。5个运动目标方位向速度分别为5 m/s,12 m/s,18 m/s,25 m/s,32 m/s,表7为得到的结果。
表7 双波段融合检测运动目标测速结果 m/s
根据表7可以发现,在慢速的时候都可以较好地估计目标速度,随着目标方位向速度不断增大,依次进入波段一和波段二的盲速区,之后产生速度模糊,而融合了波段一和波段二的结果可以较为精确的得到目标的估计速度。
4 结 语
针对三通道SAR/GMTI实现方法中存在的速度模糊问题,本文提出双波段融合解速度模糊的方法。该方法在原有的三通道DPCA系统上,增加不同波段下的动目标信息,再不提高硬件要求和损失检测精度的情况下实现解运动目标的速度模糊。理论分析和仿真结果都表明可以有效的提高定位和检测精度。如何更加充分利用双波段模式下的动目标信息,提高运动参数的估计是下一步工作的重点。
参考文献
[1] 孙华东.多通道SAR地面运动目标检测与参数估计研究[D]. 哈尔滨:哈尔滨工业大学,2009.
[2] 夏猛.多通道SAR系统地面运动目标信息获取方法研究[D]. 西安:西安电子科技大学,2012.
[3] 刘安娜,陈力,赵斐,等.基于DPCA?FrFT的三通道 SAR?GMTI 方法[J].电子学报,2011,39(9):2091?2097.
[4] DRAGOSEVIC M V, BURWASH W, CHIU S. Detection and estimation with RADARSAT?2 moving?object detection experiment modes [J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(9): 3527?3543.
[5] 杨贤林.机载双通道 SAR 地面运动目标检测成像技术研究[D].北京:中国科学院研究生院,2005.
[6] 杨垒,王彤,保铮.解运动目标径向速度模糊的一种新方法[J]. 西安电子科技大学学报,2009,36(2):189?192.
[7] CUMMING I. G, LI S. Adding sensitivity to the MLBF Doppler centroid estimator [J]. IEEE Trans, 2007, 45(2): 279?292.
[8] 李蕾.基于VSAR系统的地面动目标检测技术与速度解模糊方法研究[D].西安:西安电子科技大学,2012.
[9] 郑明洁.合成孔径雷达动目标检测和成像研究[D].北京:中国科学院电子学研究所,2003.
[10] LI G, XU J, PENG Y N, et al. Location and imaging of moving targets using nonuniform linear antenna array SAR [J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(3): 1214?1220.
- 初中数学教学中数形结合思想的实践探析
- 如何在高中数学教学中开展探究性学习
- 中职数学公式的有效记忆
- 全人教育背景下高中数学创新教育的研究与实践
- 高考中导函数的解题策略
- 导数在经济学中的应用
- 三角函数求最值的几种解题策略
- 谈数学课堂如何实现优质高效
- 高中数学三角函数教学要点初探
- 浅论高等数学网络教学平台的辅助作用
- 高中数学新课程中的向量及其教学策略
- 三角经典问题研究两例
- 问题驱动教学策略在“函数的单调性”教学中的应用
- 浅议游戏在初中数学课堂教学中的价值利用
- 现代信息技术在高中数学课堂教学中的应用探讨
- 谈高中数学教学中函数意识的培养
- 美育让高中数学课堂脱颖而出
- 中学数学教学失误及对策分析
- 初中数学课堂教学学生有效参与策略的浅谈
- 浅谈合情推理在初中数学教学中的应用
- 利用“隐性”轨迹解决相关问题
- 高中数学选择题的奇妙解法
- 提升高中数学习题课教学效率的实践研究
- 借语言之东风,顺入几何门槛
- 高中网络教学如何构建趣味性课堂
- coking
- coky
- col.
- col
- cola
- co-labourer
- colander
- colanders
- colas'
- colas
- cold
- cold blood
- cold blooded
- cold-blooded
- cold-bloodedly
- cold call
- cold-call
- cold called
- cold-caller
- cold-calling
- cold calling
- coldcalling
- cold-canvassing
- coldcanvassing
- cold cash
- 绝育
- 绝胜
- 绝脰
- 绝膑
- 绝膑折脰
- 绝致
- 绝色
- 绝色佳人
- 绝色美女
- 绝色美女使人心动
- 绝艳
- 绝艳惊才
- 绝艺
- 绝薪止火
- 绝虑凝神
- 绝裙而去
- 绝裾
- 绝裾而去
- 绝裾辞母
- 绝观
- 绝讯
- 绝识
- 绝诗
- 绝话
- 绝语辞