
摘 要: 汽车传动液压控制系统是一个时变非线性的多元控制模型,传统的模糊控制算法不能有效满足控制精度,故提出一种基于改进PID算法的汽车传动过程中的液压控制模型设计方法。根据汽车传动液压伺服的助力传递模型构建压力?流量特性方程和活塞运动方程,得到汽车传动液压控制的约束参量体系。采用改进的PID控制策略进行控制约束参量的实时整定调整,进行动态流量和液位修正,提高液压控制的准确度,得出改进的模糊控制规则。仿真结果表明,该控制模型对液位响应的收敛性较好,液压超调量几乎为0,对汽车传动控制具有更好的动态性能。
关键词: PID; 模糊控制; 汽车传动; 液压控制
中图分类号: TN948.2?34; TP273 文献标识码: A 文章编号: 1004?373X(2017)16?0090?04
Abstract: Automotive transmission hydraulic control system is a multi?unit control model of time?varying nonlinear. The traditional fuzzy control algorithm cannot effectively meet the control precision, so a design method of the improved PID algorithm?based hydraulic control model used in the process of automotive transmission is presented. The pressure?flow characteristic equation and the piston motion equation were established according to the hydraulic servo assisted transfer model of automobile transmission. The constraint parameter system for automotive transmission hydraulic control was obtained. The improved PID control strategy is used to adjust the control parameters in real time, and modify the dynamic flow and liquid level to improve the accuracy of hydraulic control. The simulation results show that the control model has good convergence to the liquid level response, the hydraulic overshoot is almost 0, which has better dynamic performance for the vehicle transmission control.
Keywords: PID; fuzzy control; automobile transmission; hydraulic control
0 引 言
汽车传动系统控制是采用液压伺服机构作为传动系统的多模控制系统,通过控制电液伺服阀调节汽车传动液压的流量和压力,进行汽车传动的齿轮耦合控制,实现汽车传动伺服机构持续稳定动作。
汽车传动液压控制系统是一个时变非线性的多元控制模型,对其控制精度和品质是保证汽车传动系统稳定可靠的关键[1]。随着智能控制技术的发展,对控制系统的品质和控制精度提出了更好的要求。传统的控制方法主要有滑膜控制[2]、积分反馈控制和模糊控制[3]。
采用模糊自适应控制进行汽车传动的液压缸动力学控制模型设计,取得了较好的控制效果,但是传统的控制方法受到汽车传动液压系统的二阶振荡和非线性失真等因素的影响,导致控制的收敛性不好,容易导致参量失稳和输出传动量失衡,需要进行控制模型改进设计。针对这一问题,本文提出一種基于改进PID算法的汽车传动过程中的液压控制模型设计方法,进行控制规则的改进设计,并进行控制模型的实验分析,得出有效性结论,展示了本文控制方法在提高汽车传动液压控制性能方面的优越性。
1 汽车传动液压控制系统建模
1.1 液压伺服助力传递模型
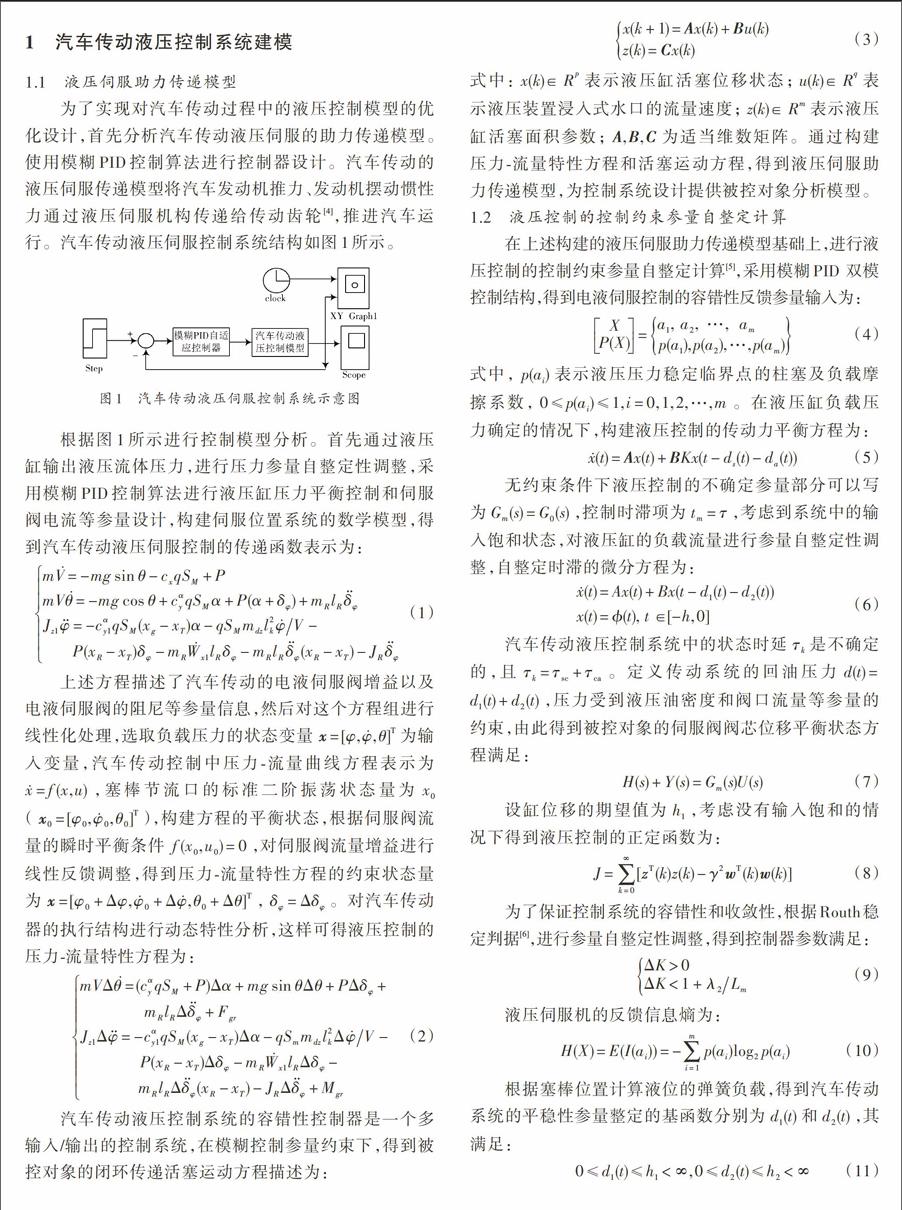
为了实现对汽车传动过程中的液压控制模型的优化设计,首先分析汽车传动液压伺服的助力传递模型。使用模糊PID控制算法进行控制器设计。汽车传动的液压伺服传递模型将汽车发动机推力、发动机摆动惯性力通过液压伺服机构传递给传动齿轮[4],推进汽车运行。汽车传动液压伺服控制系统结构如图1所示。
根据图1所示进行控制模型分析。首先通过液压缸输出液压流体压力,进行压力参量自整定性调整,采用模糊PID控制算法进行液压缸压力平衡控制和伺服阀电流等参量设计,构建伺服位置系统的数学模型,得到汽车传动液压伺服控制的传递函数表示为:
1.2 液压控制的控制约束参量自整定计算
在上述构建的液压伺服助力传递模型基础上,进行液压控制的控制约束参量自整定计算[5],采用模糊PID 双模控制结构,得到电液伺服控制的容错性反馈参量输入为:
2 改进PID汽车传动液压控制实现
2.1 改进的模糊自适应PID控制器设计
在上述对汽车传动液压控制被控对象描述和控制约束参量自整定性分析的基础上,本文提出一种基于改进PID算法的汽车传动过程中的液压控制模型设计方法。构建基于改进模糊自适应PID算法的汽车传动液压控制器的系统结构框图如图2所示。
根据图2所示的控制器结构,构建PID神经网络结构,进行汽车传动液压模糊自适应控制,PID分为输入层、隐含层与输出层,采用模糊推理规则[7],在PID的输入层输入液压控制的控制目标参量R(x),根据液压阀的工作流量,得到PID模型神经元的输入为:
3 仿真实验分析
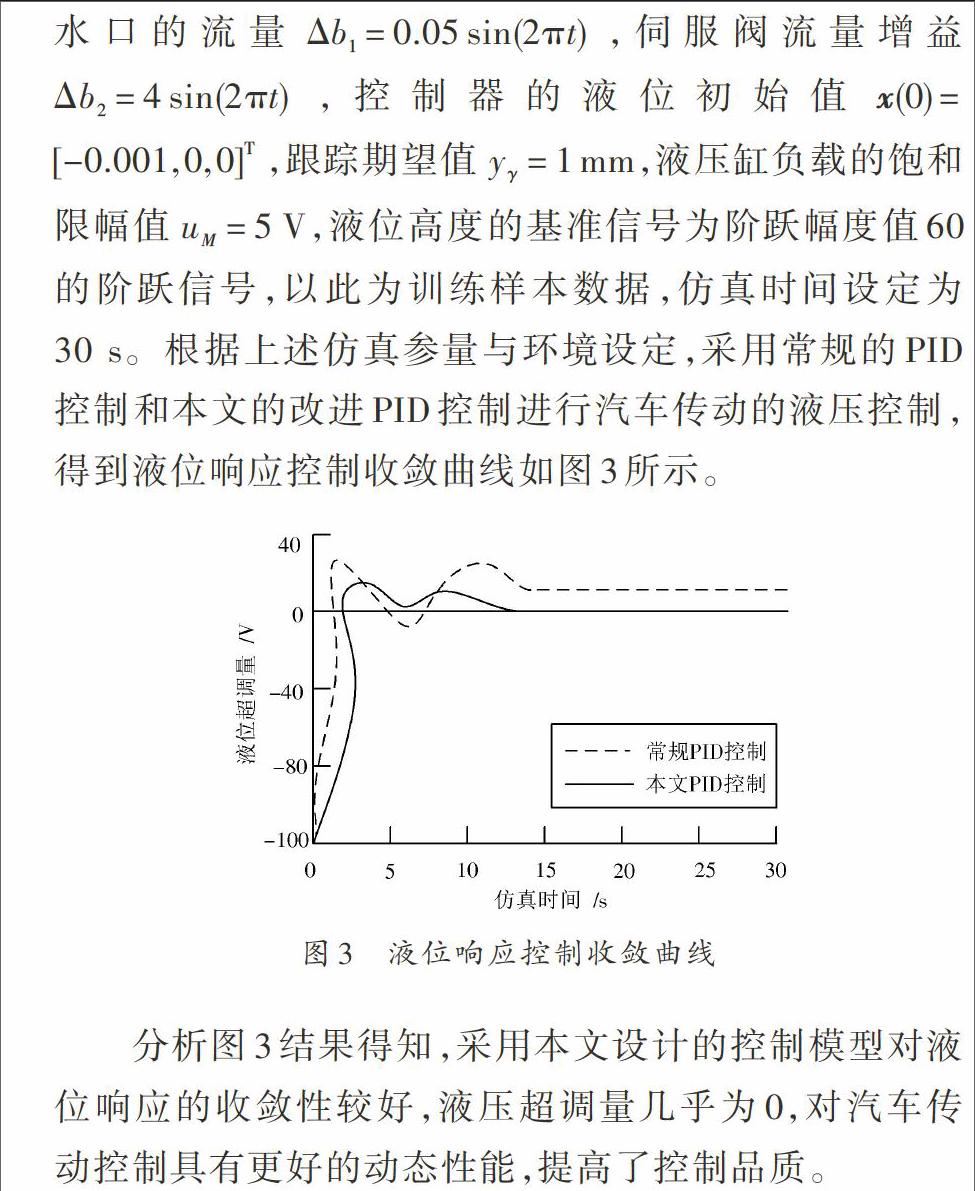
为了测试本文设计的液压控制模型在实现汽车传动过程中的液压控制中的性能,进行仿真实验分析。实验建立在Matlab 7.0仿真软件上,取负载流量[b1=0.1],液压缸流量[b2=-14.6 ],负载的弹性刚度[b3=14],浸入式水口的流量[Δb1=0.05sin(2πt)],伺服阀流量增益[Δb2=4sin(2πt)],控制器的液位初始值[x(0)=][[-0.001,0,0]T],跟踪期望值[yγ=1]mm,液压缸负载的饱和限幅值[uM=5]V,液位高度的基准信号为阶跃幅度值60的阶跃信号,以此为训练样本数据,仿真时间设定为30 s。根据上述仿真参量与环境设定,采用常规的PID控制和本文的改进PID控制进行汽车传动的液压控制,得到液位响应控制收敛曲线如图3所示。
分析图3结果得知,采用本文设计的控制模型对液位响应的收敛性较好,液压超调量几乎为0,对汽车传动控制具有更好的动态性能,提高了控制品质。
4 结 语
本文提出一种基于改进PID算法的汽车传动过程中的液压控制模型设计方法,根据汽车传动液压伺服的助力传递模型构建压力?流量特性方程和活塞运动方程,得到汽车传动液压控制的约束参量体系。采用改进的PID控制策略进行控制约束参量的实时整定调整,进行动态流量和液位修正,提高液压控制的准确度,得出改进的模糊控制规则。该控制模型对液位响应的收敛性较好,液压超调量几乎为0,对汽车传动控制具有更好的动态性能,具有较高的品质。
参考文献
[1] XU Y, TONG S, LI Y. Prescribed performance fuzzy adaptive fault?tolerant control of non?linear systems with actuator faults [J]. IET control theory and applications, 2014, 8(6): 420?431.
[2] REN Tianpeng, YUEN Chau, GUAN Yongliang. High?order intensity modulations for OSTBC in free?space optical MIMO communications [J]. Wireless communications letters, IEEE, 2013, 2(6): 607?610.
[3] 陈刚,柴毅,丁宝苍,等.电液位置伺服系统的多滑模神經网络控制[J].控制与决策,2009,24(2):221?225.
[4] 李建雄,方一鸣,石胜利.具有输入饱和的轧机液压伺服系统鲁棒动态输出反馈控制[J].控制与决策,2013,28(2):211?216.
[5] 曹玉丽,史仪凯,袁小庆,等.自平衡机器人变论域模糊PID控制研究[J].计算机仿真,2013,30(2):347?350.
[6] 王三秀,俞立,徐建明,等.机械臂自适应鲁棒轨迹跟踪控制[J].控制工程,2015,22(2):241?244.
[7] CHOI J, YU K, KIM Y. A new adaptive component?substitution?based satellite image fusion by using partial replacement [J]. IEEE transactions on geoscience and remote sensing, 2011, 49(1): 295?309.
- 医学图书馆数字资源用户满意度调查分析
- 电子商务时代跨境电商市场营销的新途径分析
- 抖音在西班牙非著名景区推广的可行性研究
- CALS技术在航空工业A公司售后服务中的应用研究和实践
- “新零售”商业模式对零售业企业的影响研究
- 安全帽透气通风性能提高的分析与前景应用
- 高职院校销售管理课程理实一体教学改革探索
- 我国汽车自主品牌汽车营销策略探讨
- 浅谈“新零售”形势下的卷烟零售终端建设
- 新形势下河南电力市场营销策略及分析
- 森林经营方案编制和管理存在的问题及对策
- 把握扶贫工作的四个发力点
- 丝绸之路背景下陕西旅游小镇功能定位研究
- 民宿经济助力乡村振兴的路径研究
- 基于DEA模型的湘西州卫生资源配置效率分析
- 全球化背景下苏州城市品牌形象塑造与传播研究
- IPA分析法下东北冰雪旅游资源游客满意度改善研究
- 乡村振兴背景下民宿服务品质提升研究
- 基于多元分析的智慧城市竞争力研究
- 知识产权法中利益平衡原理研究
- 新形势下银行信贷风险管理问题研究
- 基于消费社会学的人情消费现象研究
- 辽宁省文化产业知识产权保护的问题及对策
- 基于Logistic回归的股价上涨概率预测研究
- 高新技术企业市场营销管理问题的解决措施研究
- inclementness
- inclementnesses
- find your way around
- find²
- find¹
- fine
- fine art
- fined
- fine-down
- finely
- finenesses
- fineprint
- fine print
- finer
- finery
- fines
- finesse
- finessed
- finesseful
- finesser
- finesses
- finessing
- finest
- fine-tune
- finetune
- 荡潏
- 荡激
- 荡瀁
- 荡灭
- 荡然
- 荡然一空
- 荡然俱尽
- 荡然无余
- 荡然无存
- 荡然无遗
- 荡然肆志
- 荡燃(然)
- 荡目
- 荡秋千
- 荡秽涤瑕
- 荡累涤瑕
- 荡荡
- 荡荡之勋
- 荡荡巍巍
- 荡荡悠悠
- 荡薄
- 荡蛊
- 荡蠲
- 荡覆
- 荡词浪语