工业机器人精密减速器的应用及现状
熊嘉豪 张广宇 孙启凡

摘要:工业机器人精密减速器是机器人控制系统中的核心零部件,由于工业机器人的末端执行器速度较高,需要减速器来提高机械手的控制精度。我国的减速器发展起步较晚,受到数控机床加工精度的限制,很难生产高精度的减速器,减速器的市场份额大部分都被国外市场垄断。随着国家提出大力支持科技创新和技术创新,摆脱核心技术受制于人的现状,我国减速器将迎来重大的发展机遇。
关键词:控制精度;工业机器人;减速器;科技创新
Abstract:The precision reducer of an industrial robot is the core component of the robot control system.Due to the high speed of the end effector of the industrial robot,a reducer is required to improve the control accuracy of the manipulator.The development of reducers in our country started late.Due to the limitation of the machining accuracy of CNC machine tools,it is difficult to produce high-precision reducers.Most of the market share of reducers is monopolized by foreign markets.As the country proposes to vigorously support scientific and technological innovation and get rid of the status quo that core technology is restricted by others,my country's reducer will face crucial development opportunities.
Key words:control precision;industrial robot;reducer;technology innovation
机器人被誉为“位于制造业顶端的明珠”,机器人技术是推动国家工业化和智能化的重要引擎。当前,中国处于产业升级的关键时期,也是重大的发展机遇期。机器人技术已经成为推动中国产业转型的重要力量。我国的机器人行业经过多年的发展已经成为机器人生产和使用大国,但是在工业机器人核心零部件减速器生产方面,我国仍然处于行业内较低的水平。本文详细介绍了工业机器人减速器的分类和应用场合,并以RV减速器为例子,分析计算其传动比和齿轮的基本参数。最后,本文展望未来,指出了我国减速器发展受制于人的原因和下一步发展方向。只有尽快研究出高精密度的减速器,我们的国产机器人行业才能高质量的发展。
一、机器人减速器的分类
工业机器人的减速器主要有三种类型,分别是:谐波减速器、RV减速器、行星减速器三种。RV减速器主要由第一级渐开线圆柱齿轮行星减速机构和第二级摆线针轮行星减速机构两个部分构成。具有结构紧凑、震动小、能耗低、两级减速、圆盘稳定性较强的特点。比起单纯的摆线针轮行星传动,其体积较小,而且过载能力强,输出轴的刚性大,目前被广泛的应用于机器人的减速器之一。谐波减速器是一种利用柔性构件的弹性变形波来进行动力传动变换的新型齿轮减速器。其组成部分主要有三种:谐波发生器、柔性轮和钢轮。谐波减速器具有结构简单,传动精度高,传动比大,传动效率可以达到90%以上,在对机器人控制精度要求较高的场合经常用到。行星减速器中心是由太阳轮组成,三个行星以太阳轮为中心进行旋转运动。其运动方式类似于地球围绕太阳旋转。行星减速器具有体积较小,携带负载大,运行平稳,寿命长的特点。是一种加工精度较高的减速器系统,可以达到军用的精度要求。由于其造价不高,也在工业生产中得到了广泛的应用。
(一)RV减速器的原理
RV减速器主要用于机器人的关节运动中,对于机器人本体的工作末端影响至关重要。减速器使得机器人具有相当高精度和准确可靠的运动。RV有两级减速齿轮,第一级减速是对输入和输出齿轮进行外啮合,第二层减速通过正侧齿轮推动偏心轴,执行安装在偏心轴的RV齿轮,RV齿轮将做偏心运动。相对于第一层来说,第二级的传动因为输入方向转速不高,所以整体传送更加稳定。输出机构通过推力球轴承安装于外壳内部,支撑刚度大、承载能为强。相对于传统的摆线传动来说,因为在整个结构两边都有法兰盘作为支撑,显著提升它的扭转刚性承载能力。在目前现有的机器人当中,绝大部分是使用RV型的减速器。图1是RV减速器的组成结构图。
1.机架外 2.输入齿轮 3.直齿轮4.曲轴 5.RV齿轮 6.针轮 7.输出法
(二)谐波减速器的工作原理
谐波减速器主要是安装在机械臂的各个关节里面,减速器精度影响着机器人的操作精度以及生产效益。目前,全球大多数的高精度减速装置都是由位于日本Harmonic Drive Systems Inc公司生产的。我國减速器发展进度较慢,技术相对不成熟,减速器的精度水平与日本有很大的差距。多年来,减速器的核心工艺和技术一直被外国垄断。机器人减速器的进口成本一直居高不下,成为我国机器人产业发展的最大阻力。谐波减速器主要由谐波发生器,柔性齿轮和刚性齿轮三个部分组成。在三个传动装置中,一般可以固定一个为重动轴,而另外两个为主动轴。运用传动比与齿轮齿数成正比的规律,可以对机械手关节进行分级调速。一般的减速其中谐波发生器作为主动轴,柔性齿轮和刚性齿轮作为从动轴。多级的谐波齿轮传动比大,可以实现对机器人关节的高效和快速检测。由于谐波齿轮传动中齿数啮合较多,容易引起齿轮零部件的疲劳失效,故柔轮通常采用高刚度材料,齿轮的负载能力强。
(三)精密行星减速器的工作原理
精密行星是由行星轮、太阳轮、内齿圈组成的。由于其体积小的特点,一般传动比不会超过10。相对于谐波和RV减速器而言,行星减速器具有较高的强度和控制精度,扭矩的传动效率高。行星减速器是由三个行星轮绕着一个太阳轮旋转,具有质量轻、体积小、负载能力强、启动平稳的特点。行星减速器多用于步进电机和伺服电机的减速运动,其功能主要是让电机的运动转矩下降,扭矩上升,从而降低机器人关节电机的运行速度。对于控制精度要求较高的场合,一般采用伺服电机来驱动机器人控制。
(四)RV减速器的传动原理
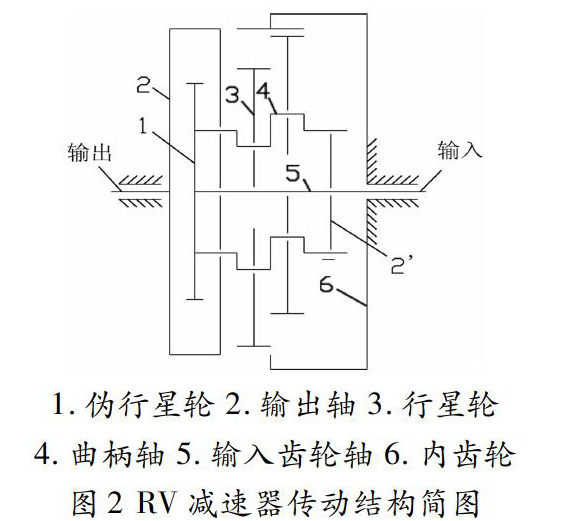
图2所示的RV减速器传动结构简图主要由两级减速装置组成。第一级减速装置是由伪行星轮组成,其传动方式是外啮合传动。而第二级是采用少齿差行星轮内啮合传动。该减速器有三根曲轴,可以提升机器人控制系统的平稳性。机器人关节的速度调节主要由行星轮来控制,可以将机器人的速度信息传递给输出轴,从而达到控制机器人关节的转速的目的。
1.伪行星轮 2.输出轴 3.行星轮4.曲柄轴 5.输入齿轮轴 6.内齿轮
二、国内外减速器发展现状
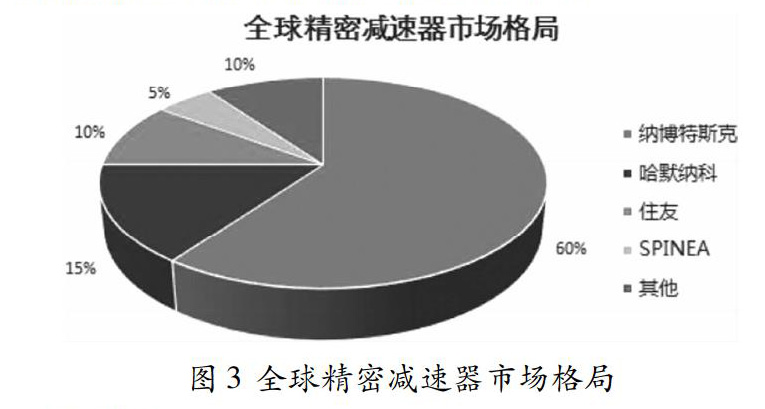
从全球精密减速器市场格局可以看出,日系企业占据了大量的市场份额。机器人精密减速器制作要求较高的工艺流程和工程规范,因此制造精密减速器所需成本高,加工精度要求高,有很大的技术壁垒。我们可以从图3中看到,在全球工业机器人减速器的市场中,日本的纳博斯特在RV减速器处于垄断地位。两家几乎占据了全球75%的市场。而另一家住友重工也占了10%的市场。反观我国的减速器起步较晚,最早的秦川机床也要等到1987年才开始从事减速器的研究。但是,受到国内加工水平的限制,我国RV减速器相较于国外,缺点主要是受制精度不能长时间保持,这与我国的基础工业发展底子较薄也有关系。当前,我国提出了工业和数字产业升级,相信在不久的将来,我国的工业生产水平能逐渐向高端迈进。为了提升机器人减速器的控制精度,只有改进当前的生产工艺,提高摆线轮和轴承的控制精度,我们国家的减速器研究才能取得更大的进步。
三、結语
随着国家智能制造“2025”的提出,我国不断支持和鼓励机器人核心部件的研发工作。据悉,目前的一个机器人本体,有50%的利润要被国外厂商赚走。比如,在减速器核心技术处于垄断地位的日本哈默纳科公司,利用其技术优势,哈莫纳科公司赚取了大量的利润。此外,在机器人伺服系统和控制器方面,中国还与国外的先进产品有着不少的差距。目前,国内的厂商想要弥补差距,需要对减速器进行优化设计,满足减速器的精度和强度要求。同时,先进的制造业是生产精密减速器的关键,我们国家当前面临的问题就是减速器运行一段时间后,精度难以保持。特别是材料成型和加工方面,我们相较于日本的减速器还有不小的差距。在未来,我相信在国家大力的支持下,我国一定能突破机器人的技术瓶颈,突破国产加速器定位精度低、寿命短的缺点。
参考文献:
[1]俞志根,黄柄超.六轴工业机器人用减速器的改进设计[J].湖州职业技术学院学报,2018,16(03):80-83.
[2]李朝海,李川东,邹开燕.工业机器人谐波减速器的发展及其应用[J].智能机器人,2018(04):44-45.
[3]韩炬,曹利杰.工业机器人关节减速器关键结构啮合运动仿真[J].计算机仿真,2018,35(05):282-287.
[4]王文涛,杨斌.浅谈工业机器人用精密减速器[J].中国新技术新产品,2018(13):40-41.
[5]张景钰.机器人关节RV减速器研究[D].陕西科技大学,2018.
[6]王东峰,姜韶峰,张振强,刘胜超,何崇光.工业机器人RV减速器专用精密轴承技术分析[J].轴承,2018(05):7-11.
[7]徐永帅,陈纯,王佳伟,徐慧茹.类RV减速器传动比分配及参数计算[J].现代制造技术与装备,2020(06):92-94.
