基于最小二乘的视野区域运动方向分析
周晶莹
摘要:文章利用最小二乘法、迭代法、遍历法,结合MATLAB编程解决了如何在客观环境限制条件下判断当前视野区域运动方向的问题,得到了一系列从一维到三维运动方向的判断方法。首先利用MATLAB得到所选图像的灰度值矩阵,然后根据一定原则选取5个特征域,再比较前后两张图像的位置对应关系,最终通过迭代法推断出视野区域的运动方向。关键词:最小二乘;迭代;特征域
1 问题描述
随着数码摄像技术不断发展,对于计算机技术和自动化技术的要求也越来越高。通过选取图像特征域并比较其前后位置对应关系,推断出较为真实目可靠的视野区域运动方向。
2 模型的建立
2.1 基本假设
(1)拍摄的整个场景的状态是稳定静态的;(2)整个场景的光源是充足均匀的;(3)低分辨率成像,分辨率为32X64;(4)图像为黑白单色图像;(5)拍摄图像的时间间隔是一定的;(6)视野区域是缓慢匀速移动的;(7)图像是实时上传至计算机且快速处理的。
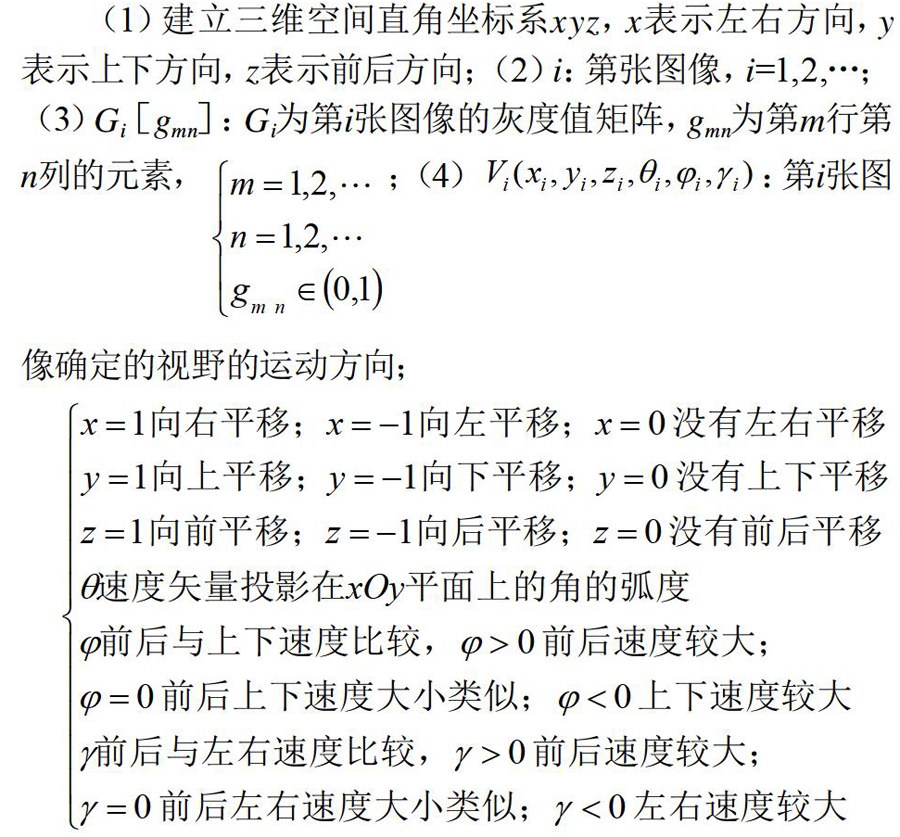
2.2 符号说明
2.3 图像预处理
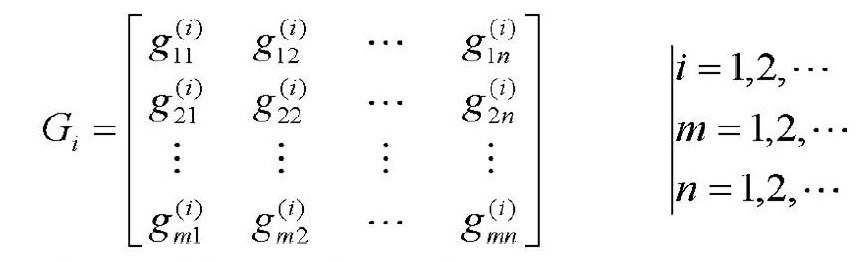
首先利用MATLAB的imread()函数读取图像,即将所摄图像数字化,转化为图像文件数据。然后通过rgb2ntsc()函数对图像转换为NTSC模式,得到一个二维数组构成的灰度值矩阵Gi[gmn],这个矩阵存储着每个像素对应格子的亮度平均值,即灰度值信息。假设矩阵元素值为1表示白色,0表示黑色,图像的颜色均处在黑白或黑白之间,图像数字化后的数字范围在0~1之间。
其中,Gi为第i张图像的灰度值矩阵。
2.4 推断运动方向Vi+1
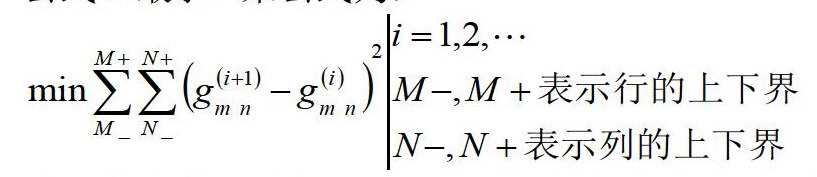
视野区域在三维空间内运动时,其反映在所摄图像上最明显的是边界和中心区域的变化,可以在4个边界及中心位置选取5个特征域作为判断运动方向的依据。由于视野区域是缓慢运动,可假定视野左右、上下移动的平移量不超过图像长度的1/4,并选取具有代表性的中心位置作为中间特征域。根据上述选取特征域的原则,在每个第i张图像的灰度值矩阵Gi上选取出这5个特征域,再对第i+1张图像的灰度值矩阵Gi+1从g11开始进行遍历,利用最小二乘的原理,得到每个特征域在第i+1张图像上的1个最优位置和4个较优位置。
公式1最小二乘公式为:
由于某个特征域在视野区域移动后可能会出现丢失的情况,需要先对利用最小二乘法得到的最优解进行然阈值判断。经多次编程试验结果表明,对于边界特征域将阈值设置为1,对于中心特征域将阈值设置为0.1,能够较为精确判断出特征域是否丢失。若最优解结果大于阈值,就假定某特征域完全消失;若最优解小于阈值,那么就表明该特征域仍在后一张图像中,并在4个较优解中选取与最优解相差不超过20%作为次优解,再将最优解和次优解的结果进行加权平均进行二次判断,最后确定出特征域在后一张图像中的具体位置。由于视野区域的位移量不一定以像素的整数倍运动,为了提高精确率,可利用最优解和次优解的加权平均进行判断来有效的减少误差。
通过以上步骤,判断出5个特征域对应的位置变化,并结合这5个特征域的位置变化得出较为精确的确定出第i张图像的运动方向Vi(xi,yi,zi,θi,φi,γi)。
2.5 确定视野区域运动方向
由第一张和第二张图像的特征域位置变换的分析结果可以确定一个运动方向V1(x1,y1,z1,θ1,φ1,γ1),继续迭代第三张图像,把其x,y轴的平移量与前两张图片所确定的平移方向先加权平均,再求得新的运动方向V2(x2,y2,z2,θ2,φ2,γ2),并将|θ2-θ1|作为两个运动方向之间的误差。经过多次试验结果分析,误差在π/60以内属于合理误差标准。如果符合误差标准,则第三张图像确定的运动方向V2(x2,y2,z2,θ2,φ2,γ2)即最终的视野区域运动方向,否则,继续迭代下一张图像直至|θ2-θ1|<(π/60)即符合误差标准,则运动方向和视野区域的运动方向为Vi+1(xi+1,yi+1,zi+1,θi+1,φi+1,γi+1)。
2.6 运动方向讨论
在整个三维空间中建立空间直角坐标系xyz,其中x表示左右方向,v表示上下方向,z表示前后方向。
2.6.1 一维平移运动
一维平移运动即视野区域沿着平行于某一条坐标轴的方向运动,一共分为向左、向右、向上、向下、向前、向后6种运动形式,且各个运动形式是互斥的。根据5个特征域的位置变换情况,就可以较为准确地判断视野区域运动方向。具体分析如表1所示。
2.6.2 二维平移运动
二维平移运动即视野区域在平面内运动,且与坐标轴有一定的夹角。与一维平移运动一样,可以根据5个特征域的位置变化情况,得到视野区域的运动方向。示例部分结果如图1-2所示。
2.6.3 三维平移运动
三维平移运动即视野区域在整个空间中运动,存在3个方向上的分量。由于未知实际景象在图像中的缩放程度和拍摄间隔的时间,不能直接根据特征域移动的像素距离来判断出视野区域具体向各个方向上的运动速度。当视野区域存在向前或向后的平移时,虽无法得出其在平面内运动的具体角度,但可通过对二维平移运动的结果分析,得到前后、上下、左右运动的相对运动速度快慢,并能确定运动方向投影在平面内的角度的弧度值。由此在一维、二维平移运动的基础上可以分析出三维平移运动的运动方向。
3 结语
基于“计算机视觉”从复杂变化的背景环境中准确识别出目标物体运动的技术在生活中具有广泛应用,例如:可用于对安全性比较敏感的智能视频监控系统,通过对实时图像帧的分析可以分辨出监控下目标物体的具体行为,以达到监控的目的;其次可以以此为基础研发智能交通检测系统,以便运用在测试事故现场车辆行为、车辆测速、交通流量监控等场合;最后还可以进一步与人工智能技术相结合,为人机交互的机器人技术的发展奠定基础。
可以说,基于图像目标物体运动识别技术是各种自动化技术和计算机技术未来发展的关键底层技术,如果可以进一步深化文章的研究模型并与其他计算机技术联合起来,则将会有更好的发展前景,具有很强的现实意义。
