高原山地环境下无人机通视图航线规划方法研究
邓树荣 陈维锋 张方浩 曹彦波 杜浩国 余庆坤 和仕芳
摘要:高原山地环境山脉较高,普通无人机在航拍获取地震灾情时很难飞越大型山脉。通过对高原山地地震特征进行分析,阐述障碍物通视图的基本原理,并以香格里拉—奔子栏航线为例进行通视图航线规划,采用迪克斯屈拉(Dijkstra)算法求出航线起飞点到目标点的最短路径,最后利用Google earth软件绘制出最优航线。通视图航线规划为无人机飞越大型山脉或避开障碍物提供了一种较好的航线规划方法。
关键词:高原山地;无人机航线规划;Google earth;通视图;香格里拉—奔子栏
中图分类号:P315.9;TP751 文献标识码:A 文章编号:1000-0666(2018)02-0201-08
0 前言
高原在地理学上的定义是指海拔在1000m以上、面积广大、地形开阔、周边以明显的陡坡为界、比较完整的大面积隆起地区。山地在地质学上的定义是指海拔在500m以上的高地,地形起伏很大,山高谷深,一般多呈脉状分布。高原的总高度有时比山地大,有时相对较小,但高原上的高度差异较小,且一般高原上也可能会有山地,高原和山地经常交织在一起。因此,在研究高原和山地这2种地理形态的时候经常将2者整合在一起考虑。据统计,我国高原面积占国土面积的26%,山地面积占33%,两者面积总和占国土面积超过50%。我国90%以上的5.0级以上破坏性地震发生在高原山地地区,高原山地地震具有一些典型的特征:一是地震烈度高、灾害重。根据我国现行的《中国地震动参数区划图》(GB18306-2015),我国有41%的国土、一半以上的城市位于地震基本烈度Ⅶ度或Ⅶ度以上地区,几乎所有的高原山地地区均处于高烈度设防范围。高原山地地区自然环境恶劣,经济欠发达,抗震设防标准低,地震灾害重。二是高原山地地震容易诱发次生灾害。高原山地地质结构复杂,高山河谷纵横交错、海拔落差大,一些特殊的喀斯特地貌在云贵高原、广西地区均有分布。在破坏性地震发生时,高原山地地质环境的复杂性和不稳定性就容易导致滚石、塌陷、滑坡、泥石流、堰塞湖等次生灾害。三是地震造成的社会经济损失重。高原山地地区较平原地区相比经济欠发达,边远贫困山区的民房抗害能力非常弱,地震容易造成人员伤亡和财产损失,一旦地震造成经济损失,恢复重建成本高(陈征山等,2013)。四是地震救援难度大。中国西部现阶段绝对防震减灾能力的分布区域悬殊,除一些经济条件好且地势平坦的省会城市、盆地地区外,其余高原山地地区能力指数偏低(白仙富,戴雨芡,2015)。加之高原山地气候条件恶劣,交通不便,易给地震救援带来重重困难。
综合多次地震现场经验发现,人工调查是获取地震灾情的重要手段,但实际地震后,更需要的是尽快做出救灾决策,以便指挥调度救援力量。而要准确做出救灾决策,仍然需要快速准确掌握灾情(徐志强等,2009)。无人机在执行任务时具有简便灵活、精准快捷的特点,特别是在地震灾害应急救援中能够规避风险,从空中通道跨越障碍区域,快速获取地震灾情。因此,一些学者对无人机应用进行了许多探索和研究。2008年汶川地震后,中国地震局地球物理研究所进行无人机灾情获取系统研发,把无人驾驶飞机作为空中遥感平台,用彩色可见光、红外摄像技术拍摄空中影像数据,集成了遥感、遥控、遥测技术与计算机技术等新型应用技术的无人机灾情快速获取系统(徐志强等,2013),为无人机在地震领域的研究和应用开创了先河。他们对四川北川、青海玉树、四川庐山、云南鲁甸、云南景谷等一些重要的地震现场、地震危险区、重要地点进行了无人机航拍,这些航拍基本都在高原山地环境下进行,所取得的经验为高原山地无人机应用提供了很好的借鉴。实践证明,无人机灾情快速获取系统在地震现场开展灾情调查和获取,如道路探查、次生灾害调查、灾害快速评估等方面可发挥重要作用,能够为应急救援决策和指挥提供实时灾情信息,增强快速响应能力(徐志强等,2009)。
无人机航线规划是根据任务目标规划满足约束条件的飞行轨迹,是无人机先进任务规划系统的关键组成部分(胡中华等,2009)。基于无人机的运动学特点和高原山地环境,无人机的飞行路线需满足一些基本的约束条件:①无人机的飞行轨迹应处于最大转弯曲率范围内,飞行参数不应接近或超越飞机性能限制;②无人机的飞行高度应大于飞行区域的海拔高度,小于飞机自身的最大飞行高度,且设计高度不能太接近极限值;③所规划的航线要安全可靠,应充分考虑高原山地的地形地势,避开危险和威胁,如避开强冷气团、高海拔山峰等;④在规划无人机航线时要体现经济性和时效性,使得无人机燃料和电能消耗尽可能小,飞行距离尽可能短。在高原山地无人机应用中,飞行区域海拔落差较大,特别是在3000m以上的高海拔地区,高山峡谷相间分布,一般的无人机飞行高度很难达到大型山脉的海拔,而且无人机飞行高度太高,对地航拍效果也不好。另外,高原山地地面起伏大,无人机爬升和下降耗能多、时间长。因此,在规划无人机航线时,合理避开大型山脉和选取最短路径飞行就显得尤为必要。在无人机航线规划需要的信息中,最为重要的是地形信息和威脅信息,它们直接决定了航线规划的质量(赵文婷,彭俊毅,2006)。本文通过分析高原山地地震的特征,结合地震行业的一些无人机应用经验,通过通视图的基本思路,讨论高原山地环境下的无人机航线规划。
1 通视图法的基本思路
在图论中,图(Graph)通常由2个集合来定义,一个集合是顶点(Vertex),另一个集合为顶点之间的连线,称之为边(Edge),两个顶点之间的边代表了顶点之间的一条路径(殷剑宏,吴开亚,2003)。对于现实世界中的许多路径规划问题,通常可以将问题简化为图,并对图的元素赋予一定的权值,利用图来描述规划空间。
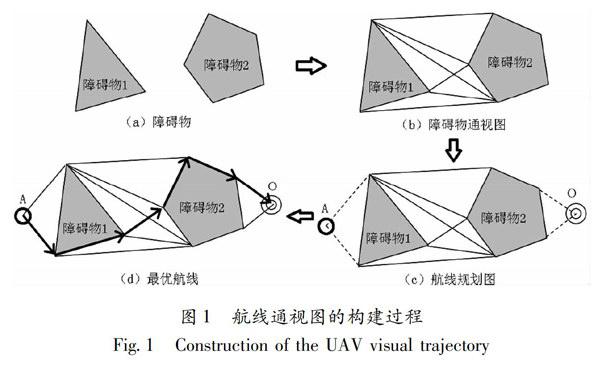
在无人机航线规划中,将无人机的航线规划空间表示成一个图,航点(控制点)为图的顶点,航点间的航线为图的边。在高原山地环境中,无人机航线规划会遇到障碍物,将障碍物的相互可见的顶点连线,就构成了一个障碍物通视图,再连上无人机的起飞点和任务区域,就构成了一个多边形航线规划图(图1)。
由通过图1c可以看出,从起飞点A到航拍点0,要避开障碍物有多条航线,此时只需知道航线规划图中各条边的权值,利用一定的算法,就可以求出A到O的最短路径,这条路径即为无人机的最优航线(图1d中粗实线箭头所示)。此处需要注意的是,要保证障碍物通视图是一个凸多边形,最后得到的路径一般有几段会沿着障碍物的边缘。
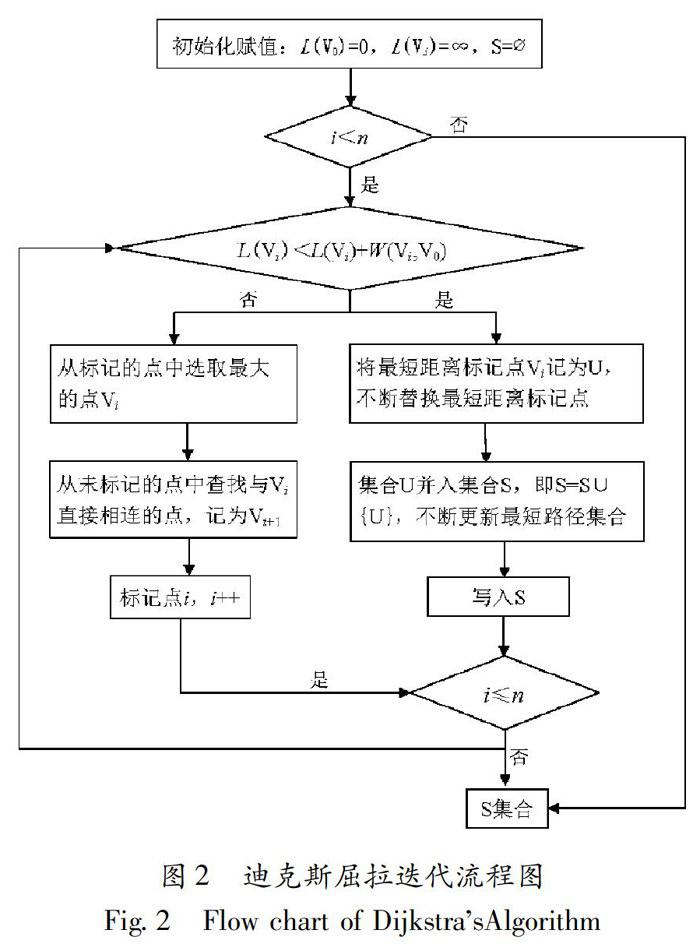
在图论中,寻找最短路径主要有迪克斯屈拉Dijkstra)算法、佛洛依德(Floyd)算法、普里姆(Prim)算法、克鲁斯卡尔(Kruskal)算法、沃夏尔(Warshall)等(殷剑宏,吴开亚,2003;严蔚敏,吴炜民,2007),再通过迭代或矩阵运算得出最优解。本文采用迪克斯屈拉迭代算法找出最短路径(殷剑宏,吴开亚,2003)。
设图G的顶点为V0,V1,…,Vn;边为{Vi,Vj}(i、J=0,1,…,n):边权为W(Vi,Vj)。若{Vi,Vj}不是图中的边,则W(Vi,Vj)=∞,规定W(Vi,Vi)=0。L(Ⅵ)表示顶点Ⅵ到源点的长度,S为路径集合,U为离源点最近的一个顶点。迪克斯屈拉迭代流程表述如下:
2 通视图航线规划
2.1 灾区概况
2013年8月28日和31日,云南省迪庆州香格里拉县、德钦县与四川省甘孜州得荣县交界先后发生5.1、5.9级地震。极震区烈度达Ⅷ度,宏观震中位于香格里拉县尼西乡幸福村至德钦县奔子栏镇争古村一带,香格里拉县、德钦县的部分乡镇遭受不同程度破坏。此次地震余震频繁,加之受震后降雨的影响,滑坡、崩塌等次生地质灾害极为严重。214国道香格里拉境内从布卡隧道到伏龙大桥一带落石、塌方不断,路基、路面严重损毁,通往巴拉村、祖史村、打史村等47条通村公路多处塌方,因受余震影响,通往巴拉格宗的公路多次交通中断。214国道奔子栏段受灾严重,塌方85处,共175000m3奔子栏、羊拉等乡镇的乡村公路和桥梁也受到不同程度的破坏。迪庆州境内山高坡陡,高山河谷落差较大,通往地震灾区的唯一生命线214国道告急,此时,若能有无人机在灾情获取和道路侦察方面提供技术支持,将对应急救援提供很好的帮助。因此,笔者选取香格里拉一奔子栏航线进行讨论和分析。
2.2 地形分析
从香格里拉县到奔子栏一带(图3),主要有蓝月山、岗木山和崩吃山,主要的河流有金沙江,主要的道路有214国道、226省道,道路沿着山谷和河谷分布。区域内海拔较高的3座山的海拔均为4000m以上,蓝月山主峰4346m,岗木山主峰4414m,崩吃山主峰4130m,金沙江河谷海拔较低,2000m左右,海拔落差2000m,居民点主要分布在海拔较低的金沙江沿岸以及214国道沿线。
2.3 航线规划
根据地震成灾特点,地震受灾区域一般会出现在有居民点和生命线工程的地方。区域内金沙江沿岸,214国道沿线有居民点和生命线工程,因此在使用无人机航拍和侦察受灾点时应沿着这些区域飞行。境内有3座海拔均在4000m以上的大型山峰,该高度可能会超过无人机的最大飞行高度,因此在规划无人机航线时应避开这3座山峰。
Google Earth采用超高影像压缩技术,能实时提供多种数据,将本地搜索和卫星影像结合起来,可以让用户浏览全球范围内任何一处地点的卫星影像以及建筑物或地形的三维图像(陈强等,2008)。因此,笔者利用Google earth对该区域作一个基于通视图方法的航线规划。首先在Googleearth里找到该区域,利用多边形工具添加1个海拔4000m的等高面,此时就可以看出区域内海拔在此等高面以上和以下的区域。从图3中可以看到,从香格里拉到奔子栏的航拍区域内,岗木山和崩吃山海拔高出了等高面,无人机飞行时这2座山就是障碍,把2座山的相互可见的顶点连线,就构成了1个障碍物通视图。再把飞机起飞点、障碍物通视图顶点连线,就构成了一个多条线段组成的航线网(图4)。从航线网中可选择任意的路径组合使无人机到达航拍点进行航拍作业。
2.4 最优航线的计算
边上有数的图称为加权图(weighted graph),若边Ei标记数为Wi,则称Wi为边Ei的权(weight)(殷剑宏,吴开亚,2003)。利用Googleearth的标尺工具量出每段航线之间的距离,对航线网的边赋予权值,就得到了航线网加权图(图5),加权图中的顶点为无人机航线的控制点,各条边的权值为相邻控制点间的直线距离。图5中,飞机起飞点A到航拍目标点O,有多条路径可走,但要根据各边的权值,找出A点到O点的最短路径。用迪克斯屈拉(Dijkstra)算法求出航线网加权图中顶点A到0之间的最短路径。
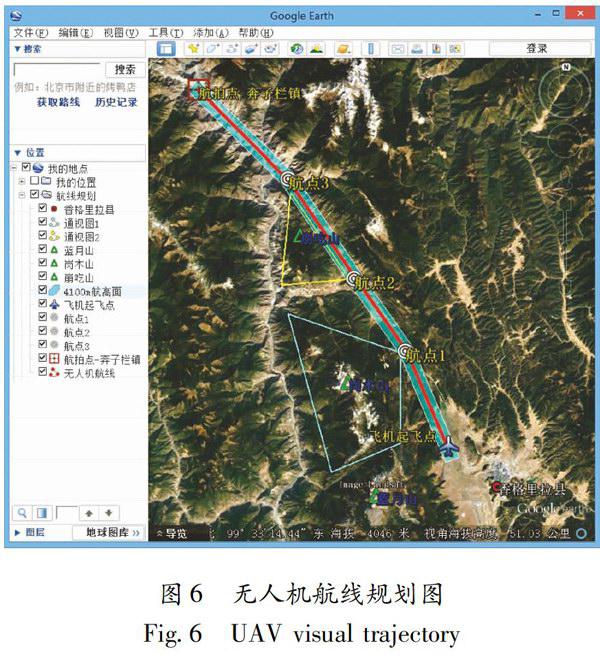
根据迪克斯屈拉迭代,从起飞点到航拍区域的最短路径为(A,V12,V21,V22,O),利用Googleearth软件(或无人机测控软件)标出各航点,作出无人机航线规划图(图6)。以云南省地震局现有的HW13型无人机为例,根据该型号无人机的参数(表2),设置各航点的经纬度、高度、转弯半径、任务动作等属性(表3),无人机就可依据最短路径航线和航线的属性执行飞行任务。
3 讨论与结论
本文讨论了二维规划空间的无人机通视图航线构建过程。该方法对一些障碍物较少、地形比较简单的二维航线规划比较实用,但对于地形较复杂,障碍物较多的航线规划,人工很难找出最短路径,就需要借助图论知识去寻求最短航路(毛红保等,2015)。筆者只讨论了2个障碍物的情形,对于多个障碍物的情况可依此类推,只是顶点较多,计算量会较大。可以证明,具有n个顶点的通视图中,要找到从源点到某一特定的终点的最短路径,迪克斯屈拉算法的时间复杂度是O(n2)(严蔚敏,吴炜民,2007),其他算法时间复杂度甚至更高。
本文的障碍物是2座山脉,在实际应用中,障碍物可以是水域、禁飞区、危险区等区域,在规划航线时可根据具体情况而定。在不同海拔、不同天气条件下的无人机技术性能参数会有不同的变化规律,等高面和控制点参数也需要根据实际任务需求来设置。另外,无人机在飞行中会有航偏,制作无人机航线时,高度和距离应该适当远离障碍物的通视图边缘,不应沿着通视图边缘设置航线,以确保无人机的安全。
高原地区飞行,固定的山地障碍物只是航线规划考虑的一个影响因素,除此之外,地形地貌、气候、气压、大气密度等因素的影响不容忽略,特别是动态可变因素的影响,如地形对气流的影响很大,气流越山绕山时会被迫发生方向或速度改变,形成乱流、山地波和风切变,会严重威胁无人机飞行安全。因此,“通视图法”规划航线仅是一个方面,要规划出一个安全可靠的飞行线路还应全面考虑其它影响因素。
参考文献:
白仙富,戴雨芡.2015.中国西部防震减灾能力地理纲要[M].昆明:云南出版集团公司.
陈强,姜立新,帅向华.2008.Google Earth在地震应急中的应用[J].地震地磁观测与研究,30(5):66-70.
陈征山,邓树荣,余庆坤.2013.高原山地地震救援力量配置研究[J].中国地震应急救援,(6):11-14.
胡中华,赵敏,姚敏,等.2009.无人机航迹规划技术研究及发展趋势[J].航空电子技术,40(2):24-36.
毛红保,田松,晃爱农.2015.无人机任务规划[M].北京:国防工业出版社.
徐志强,杨建思,姜旭东,等.2009.无人机快速获取地震灾情的应用探索[J].地震地磁观测与研究,30(5):66-70.
徐志强,杨建思,姜旭东,等.2013.无人机获取区域全景图试验[J].地震地磁观测与研究,34(3):208-212.
严蔚敏,吴炜民.2007.数据结构(G语言版)[M].北京:清华大学出版社.
殷剑宏,吴开亚.2003.图论及其算法[M].合肥:中国科学技术大学出版社.
赵文婷,彭俊毅.2006.基于VORONOI图的无人机航迹规划[J].系统仿真学报,18(S2):159-165.
GB18306-2015,中国地震动参数区划图[S].
摘要:高原山地环境山脉较高,普通无人机在航拍获取地震灾情时很难飞越大型山脉。通过对高原山地地震特征进行分析,阐述障碍物通视图的基本原理,并以香格里拉—奔子栏航线为例进行通视图航线规划,采用迪克斯屈拉(Dijkstra)算法求出航线起飞点到目标点的最短路径,最后利用Google earth软件绘制出最优航线。通视图航线规划为无人机飞越大型山脉或避开障碍物提供了一种较好的航线规划方法。
关键词:高原山地;无人机航线规划;Google earth;通视图;香格里拉—奔子栏
中图分类号:P315.9;TP751 文献标识码:A 文章编号:1000-0666(2018)02-0201-08
0 前言
高原在地理学上的定义是指海拔在1000m以上、面积广大、地形开阔、周边以明显的陡坡为界、比较完整的大面积隆起地区。山地在地质学上的定义是指海拔在500m以上的高地,地形起伏很大,山高谷深,一般多呈脉状分布。高原的总高度有时比山地大,有时相对较小,但高原上的高度差异较小,且一般高原上也可能会有山地,高原和山地经常交织在一起。因此,在研究高原和山地这2种地理形态的时候经常将2者整合在一起考虑。据统计,我国高原面积占国土面积的26%,山地面积占33%,两者面积总和占国土面积超过50%。我国90%以上的5.0级以上破坏性地震发生在高原山地地区,高原山地地震具有一些典型的特征:一是地震烈度高、灾害重。根据我国现行的《中国地震动参数区划图》(GB18306-2015),我国有41%的国土、一半以上的城市位于地震基本烈度Ⅶ度或Ⅶ度以上地区,几乎所有的高原山地地区均处于高烈度设防范围。高原山地地区自然环境恶劣,经济欠发达,抗震设防标准低,地震灾害重。二是高原山地地震容易诱发次生灾害。高原山地地质结构复杂,高山河谷纵横交错、海拔落差大,一些特殊的喀斯特地貌在云贵高原、广西地区均有分布。在破坏性地震发生时,高原山地地质环境的复杂性和不稳定性就容易导致滚石、塌陷、滑坡、泥石流、堰塞湖等次生灾害。三是地震造成的社会经济损失重。高原山地地区较平原地区相比经济欠发达,边远贫困山区的民房抗害能力非常弱,地震容易造成人员伤亡和财产损失,一旦地震造成经济损失,恢复重建成本高(陈征山等,2013)。四是地震救援难度大。中国西部现阶段绝对防震减灾能力的分布区域悬殊,除一些经济条件好且地势平坦的省会城市、盆地地区外,其余高原山地地区能力指数偏低(白仙富,戴雨芡,2015)。加之高原山地气候条件恶劣,交通不便,易给地震救援带来重重困难。
综合多次地震现场经验发现,人工调查是获取地震灾情的重要手段,但实际地震后,更需要的是尽快做出救灾决策,以便指挥调度救援力量。而要准确做出救灾决策,仍然需要快速准确掌握灾情(徐志强等,2009)。无人机在执行任务时具有简便灵活、精准快捷的特点,特别是在地震灾害应急救援中能够规避风险,从空中通道跨越障碍区域,快速获取地震灾情。因此,一些学者对无人机应用进行了许多探索和研究。2008年汶川地震后,中国地震局地球物理研究所进行无人机灾情获取系统研发,把无人驾驶飞机作为空中遥感平台,用彩色可见光、红外摄像技术拍摄空中影像数据,集成了遥感、遥控、遥测技术与计算机技术等新型应用技术的无人机灾情快速获取系统(徐志强等,2013),为无人机在地震领域的研究和应用开创了先河。他们对四川北川、青海玉树、四川庐山、云南鲁甸、云南景谷等一些重要的地震现场、地震危险区、重要地点进行了无人机航拍,这些航拍基本都在高原山地环境下进行,所取得的经验为高原山地无人机应用提供了很好的借鉴。实践证明,无人机灾情快速获取系统在地震现场开展灾情调查和获取,如道路探查、次生灾害调查、灾害快速评估等方面可发挥重要作用,能够为应急救援决策和指挥提供实时灾情信息,增强快速响应能力(徐志强等,2009)。
无人机航线规划是根据任务目标规划满足约束条件的飞行轨迹,是无人机先进任务规划系统的关键组成部分(胡中华等,2009)。基于无人机的运动学特点和高原山地环境,无人机的飞行路线需满足一些基本的约束条件:①无人机的飞行轨迹应处于最大转弯曲率范围内,飞行参数不应接近或超越飞机性能限制;②无人机的飞行高度应大于飞行区域的海拔高度,小于飞机自身的最大飞行高度,且设计高度不能太接近极限值;③所规划的航线要安全可靠,应充分考虑高原山地的地形地势,避开危险和威胁,如避开强冷气团、高海拔山峰等;④在规划无人机航线时要体现经济性和时效性,使得无人机燃料和电能消耗尽可能小,飞行距离尽可能短。在高原山地无人机应用中,飞行区域海拔落差较大,特别是在3000m以上的高海拔地区,高山峡谷相间分布,一般的无人机飞行高度很难达到大型山脉的海拔,而且无人机飞行高度太高,对地航拍效果也不好。另外,高原山地地面起伏大,无人机爬升和下降耗能多、时间长。因此,在规划无人机航线时,合理避开大型山脉和选取最短路径飞行就显得尤为必要。在无人机航线规划需要的信息中,最为重要的是地形信息和威脅信息,它们直接决定了航线规划的质量(赵文婷,彭俊毅,2006)。本文通过分析高原山地地震的特征,结合地震行业的一些无人机应用经验,通过通视图的基本思路,讨论高原山地环境下的无人机航线规划。
1 通视图法的基本思路
在图论中,图(Graph)通常由2个集合来定义,一个集合是顶点(Vertex),另一个集合为顶点之间的连线,称之为边(Edge),两个顶点之间的边代表了顶点之间的一条路径(殷剑宏,吴开亚,2003)。对于现实世界中的许多路径规划问题,通常可以将问题简化为图,并对图的元素赋予一定的权值,利用图来描述规划空间。
在无人机航线规划中,将无人机的航线规划空间表示成一个图,航点(控制点)为图的顶点,航点间的航线为图的边。在高原山地环境中,无人机航线规划会遇到障碍物,将障碍物的相互可见的顶点连线,就构成了一个障碍物通视图,再连上无人机的起飞点和任务区域,就构成了一个多边形航线规划图(图1)。
由通过图1c可以看出,从起飞点A到航拍点0,要避开障碍物有多条航线,此时只需知道航线规划图中各条边的权值,利用一定的算法,就可以求出A到O的最短路径,这条路径即为无人机的最优航线(图1d中粗实线箭头所示)。此处需要注意的是,要保证障碍物通视图是一个凸多边形,最后得到的路径一般有几段会沿着障碍物的边缘。
在图论中,寻找最短路径主要有迪克斯屈拉Dijkstra)算法、佛洛依德(Floyd)算法、普里姆(Prim)算法、克鲁斯卡尔(Kruskal)算法、沃夏尔(Warshall)等(殷剑宏,吴开亚,2003;严蔚敏,吴炜民,2007),再通过迭代或矩阵运算得出最优解。本文采用迪克斯屈拉迭代算法找出最短路径(殷剑宏,吴开亚,2003)。
设图G的顶点为V0,V1,…,Vn;边为{Vi,Vj}(i、J=0,1,…,n):边权为W(Vi,Vj)。若{Vi,Vj}不是图中的边,则W(Vi,Vj)=∞,规定W(Vi,Vi)=0。L(Ⅵ)表示顶点Ⅵ到源点的长度,S为路径集合,U为离源点最近的一个顶点。迪克斯屈拉迭代流程表述如下:
2 通视图航线规划
2.1 灾区概况
2013年8月28日和31日,云南省迪庆州香格里拉县、德钦县与四川省甘孜州得荣县交界先后发生5.1、5.9级地震。极震区烈度达Ⅷ度,宏观震中位于香格里拉县尼西乡幸福村至德钦县奔子栏镇争古村一带,香格里拉县、德钦县的部分乡镇遭受不同程度破坏。此次地震余震频繁,加之受震后降雨的影响,滑坡、崩塌等次生地质灾害极为严重。214国道香格里拉境内从布卡隧道到伏龙大桥一带落石、塌方不断,路基、路面严重损毁,通往巴拉村、祖史村、打史村等47条通村公路多处塌方,因受余震影响,通往巴拉格宗的公路多次交通中断。214国道奔子栏段受灾严重,塌方85处,共175000m3奔子栏、羊拉等乡镇的乡村公路和桥梁也受到不同程度的破坏。迪庆州境内山高坡陡,高山河谷落差较大,通往地震灾区的唯一生命线214国道告急,此时,若能有无人机在灾情获取和道路侦察方面提供技术支持,将对应急救援提供很好的帮助。因此,笔者选取香格里拉一奔子栏航线进行讨论和分析。
2.2 地形分析
从香格里拉县到奔子栏一带(图3),主要有蓝月山、岗木山和崩吃山,主要的河流有金沙江,主要的道路有214国道、226省道,道路沿着山谷和河谷分布。区域内海拔较高的3座山的海拔均为4000m以上,蓝月山主峰4346m,岗木山主峰4414m,崩吃山主峰4130m,金沙江河谷海拔较低,2000m左右,海拔落差2000m,居民点主要分布在海拔较低的金沙江沿岸以及214国道沿线。
2.3 航线规划
根据地震成灾特点,地震受灾区域一般会出现在有居民点和生命线工程的地方。区域内金沙江沿岸,214国道沿线有居民点和生命线工程,因此在使用无人机航拍和侦察受灾点时应沿着这些区域飞行。境内有3座海拔均在4000m以上的大型山峰,该高度可能会超过无人机的最大飞行高度,因此在规划无人机航线时应避开这3座山峰。
Google Earth采用超高影像压缩技术,能实时提供多种数据,将本地搜索和卫星影像结合起来,可以让用户浏览全球范围内任何一处地点的卫星影像以及建筑物或地形的三维图像(陈强等,2008)。因此,笔者利用Google earth对该区域作一个基于通视图方法的航线规划。首先在Googleearth里找到该区域,利用多边形工具添加1个海拔4000m的等高面,此时就可以看出区域内海拔在此等高面以上和以下的区域。从图3中可以看到,从香格里拉到奔子栏的航拍区域内,岗木山和崩吃山海拔高出了等高面,无人机飞行时这2座山就是障碍,把2座山的相互可见的顶点连线,就构成了1个障碍物通视图。再把飞机起飞点、障碍物通视图顶点连线,就构成了一个多条线段组成的航线网(图4)。从航线网中可选择任意的路径组合使无人机到达航拍点进行航拍作业。
2.4 最优航线的计算
边上有数的图称为加权图(weighted graph),若边Ei标记数为Wi,则称Wi为边Ei的权(weight)(殷剑宏,吴开亚,2003)。利用Googleearth的标尺工具量出每段航线之间的距离,对航线网的边赋予权值,就得到了航线网加权图(图5),加权图中的顶点为无人机航线的控制点,各条边的权值为相邻控制点间的直线距离。图5中,飞机起飞点A到航拍目标点O,有多条路径可走,但要根据各边的权值,找出A点到O点的最短路径。用迪克斯屈拉(Dijkstra)算法求出航线网加权图中顶点A到0之间的最短路径。
根据迪克斯屈拉迭代,从起飞点到航拍区域的最短路径为(A,V12,V21,V22,O),利用Googleearth软件(或无人机测控软件)标出各航点,作出无人机航线规划图(图6)。以云南省地震局现有的HW13型无人机为例,根据该型号无人机的参数(表2),设置各航点的经纬度、高度、转弯半径、任务动作等属性(表3),无人机就可依据最短路径航线和航线的属性执行飞行任务。
3 讨论与结论
本文讨论了二维规划空间的无人机通视图航线构建过程。该方法对一些障碍物较少、地形比较简单的二维航线规划比较实用,但对于地形较复杂,障碍物较多的航线规划,人工很难找出最短路径,就需要借助图论知识去寻求最短航路(毛红保等,2015)。筆者只讨论了2个障碍物的情形,对于多个障碍物的情况可依此类推,只是顶点较多,计算量会较大。可以证明,具有n个顶点的通视图中,要找到从源点到某一特定的终点的最短路径,迪克斯屈拉算法的时间复杂度是O(n2)(严蔚敏,吴炜民,2007),其他算法时间复杂度甚至更高。
本文的障碍物是2座山脉,在实际应用中,障碍物可以是水域、禁飞区、危险区等区域,在规划航线时可根据具体情况而定。在不同海拔、不同天气条件下的无人机技术性能参数会有不同的变化规律,等高面和控制点参数也需要根据实际任务需求来设置。另外,无人机在飞行中会有航偏,制作无人机航线时,高度和距离应该适当远离障碍物的通视图边缘,不应沿着通视图边缘设置航线,以确保无人机的安全。
高原地区飞行,固定的山地障碍物只是航线规划考虑的一个影响因素,除此之外,地形地貌、气候、气压、大气密度等因素的影响不容忽略,特别是动态可变因素的影响,如地形对气流的影响很大,气流越山绕山时会被迫发生方向或速度改变,形成乱流、山地波和风切变,会严重威胁无人机飞行安全。因此,“通视图法”规划航线仅是一个方面,要规划出一个安全可靠的飞行线路还应全面考虑其它影响因素。
参考文献:
白仙富,戴雨芡.2015.中国西部防震减灾能力地理纲要[M].昆明:云南出版集团公司.
陈强,姜立新,帅向华.2008.Google Earth在地震应急中的应用[J].地震地磁观测与研究,30(5):66-70.
陈征山,邓树荣,余庆坤.2013.高原山地地震救援力量配置研究[J].中国地震应急救援,(6):11-14.
胡中华,赵敏,姚敏,等.2009.无人机航迹规划技术研究及发展趋势[J].航空电子技术,40(2):24-36.
毛红保,田松,晃爱农.2015.无人机任务规划[M].北京:国防工业出版社.
徐志强,杨建思,姜旭东,等.2009.无人机快速获取地震灾情的应用探索[J].地震地磁观测与研究,30(5):66-70.
徐志强,杨建思,姜旭东,等.2013.无人机获取区域全景图试验[J].地震地磁观测与研究,34(3):208-212.
严蔚敏,吴炜民.2007.数据结构(G语言版)[M].北京:清华大学出版社.
殷剑宏,吴开亚.2003.图论及其算法[M].合肥:中国科学技术大学出版社.
赵文婷,彭俊毅.2006.基于VORONOI图的无人机航迹规划[J].系统仿真学报,18(S2):159-165.
GB18306-2015,中国地震动参数区划图[S].
