贾珍珍

摘要:针对我国花生收获环节机械化水平较低的现状,在介绍花生机械化收获模式的基础上,分析影响机械化收获质量的主要因素,总结花生收获机具的设计和研究概况,提出构建高效、低耗的花生收获体系的建议。
关键词:收获模式;花生;收获机;品种
中图分类号:S225.7+3 ? ?文献标识码:A ? ?文章编号:1674-1161(2020)06-0023-03
我国的花生常年种植面积在4.7×106 hm2左右,产量超1 700万t,约占全球花生总产量的40%。然而,我国2019年的花生种植综合机械化率仅为63%(机耕、机播、机收机械化水平分别在78%,55%,50%左右),远低于发达国家水平。尤其是收获环节的机械化水平较低,制约了花生全程机械化的发展。为此,在介绍花生机械化收获模式的基础上,详细分析影响机械化收获质量的主要因素,总结花生收获机具的研发概况,以期为提高花生机械化收获水平提供理论参考。
1 花生机械化收获模式
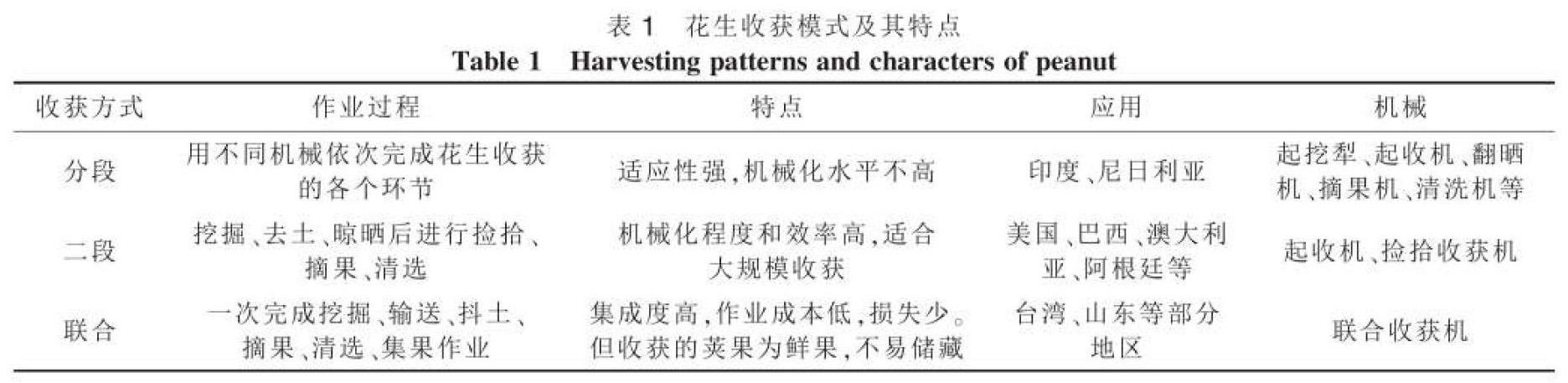
我国的花生种植主要分布在河南、山东、安徽、河北、辽宁、湖北、江苏、吉林等省,气候条件、土壤类型、种植模式、花生品种及其植株性状、耕地规模等差异显著,适宜的花生机械化收获模式也千差万别。花生收获主要有分段式收获、两段式收获和联合收获三种,其特点及应用范围见表1。
辽宁、吉林、黑龙江等耕地规模较大、花生一年一季或二年三季种植地区,适于采用两段收获方式;一年两季或三季种植、地块较小的南方,宜选用联合收获方式;种植面积不大、地块较小的丘陵山区,宜选用分段收获方式。
2 影响花生机械化收获质量的因素
2.1 花生品种
目前,我国种植的花生品种适收期短、分枝多,机械收获时易出现落果和荚果破碎的问题。黄慧等的研究表明,在花生机械收获过程中,花生植株的高度和分枝数量、适收期、茎秆坚韧度、荚果生长位置等,都会影响收获作业质量。因此,应该积极培育适收期长、果柄坚硬、结果集中、植株低矮且分枝少的花生品种。
2.2 土壤特性
花生种植区域广泛,地理地貌复杂,土壤特性(如硬度、含水率等)差异大。研究表明,土壤湿度影响其疏松度,而疏松土壤可减少收获时的机械应力,降低荚果的掉落和破损几率。相关试验研究表明,土质为沙壤,且含水率8%~15%的土壤,有利于降低机收过程中的损失。
2.3 种植模式
当前,花生的生产模式有垄作、平作、覆膜、不覆膜、套作等,规范化种植程度较低。复杂多变的作业环境使机械化收获存在捡拾落果多、荚果破损率高、功耗比率大等问题。平作宜采用人工或机械分段收获,而垄作尤其是覆膜垄作便于联合收获机作业。
2.4 机具适用性
相对于手工收获来说,机械收获的损失率大于人工收获。收获机具的机型、性能和机手经验等因素,都会影响花生机械收获的质量。陈有庆等的研究表明,采用4HLB―2型铲拔组合半喂入花生聯合收获机作业时,良好的分扶禾、挖拔、清土、摘果、清选等机构设计和作业参数选择,能显著降低机收过程中的损失。还有研究表明,沙土地块上工作良好的收获机械,转移到黏土地块容易出现阻塞、损失率高等现象。
3 花生收获机具的研发与应用
3.1 分段收获机具
根据国内的花生种植和发展趋势,研究和推广的重点仍以分段收获的中小机型为主。花生起收机和花生捡拾收获机是两段式花生收获的核心机械,此外,还包括花生条铺处理机、花生田间运输车、花生干燥运输车和花生秸秆捡拾打捆机等。
3.1.1 花生起收机 花生起收机按照工作原理可分为链杆式和夹持式。链杆式花生起收机结构简单,工作可靠,适应性良好,可在绝大多数地况条件下完成作业,但起收直立型花生(我国主要品种)时较难实现规整有序的放铺。
孔萍萍设计了一种小型铲辊式花生起收装置,得出收获期花生植株质心位置在靠近根系与主茎的交点处的结论。李佳隆研究一种适用于链杆式起收机的放铺装置,大大提高了链杆式花生收获机的作业质量。王得伟对铲链式花生起收机翻转放铺装置进行设计及研究。郭伟宏针对新疆地区花生种植的模式,考虑到现有机具适应性差的问题,研制一种可有序铺放的花生起收机,可一次完成挖掘输送、振动去土和有序铺放等作业,其工作原理见图1。田间试验结果表明,在升运链轮转速100 r/min、对辊间距150 mm、行走速度1 km/h的条件下,总损失率为2.4%,带土率为13.6%,有序铺放率为80.4%。
3.1.2 花生捡拾收获机 花生捡拾输送装置的设计借鉴自油菜、牧草等收获机械,多采用弹齿滑道滚筒式捡拾装置和链耙式输送装置。例如,陈中玉以两段收获的捡拾收获机摘果装置为对象,通过分析花生摘果装置结构及花生摘果特性,设计了一种弯齿螺杆滚筒轴流式摘果装置。许涛等对弹齿滑道式捡拾机构进行设计和仿真优化,利用土槽试验获得植株捡拾率98.9%、掉过损失率2.5%的结论。王申莹等设计一种大型全喂入花生收获机捡拾输送装置,可完成果秧的捡拾、推送归拢、交接输送及部分去土等作业,且解决了收获过程中易卡堵、易缠绕跳齿、链耙扭曲等问题。王伯凯等设计了一种适用于轴流式花生全喂入收获机的弹齿捡拾机构,较常规捡拾机构损失小、落果率低。
3.2 花生联合收获机具
联合收获是集成度最高的收获方式,适合于直立型花生品种的收获,工作效率高,收获质量好。为此,诸多科研人员对花生联合收获机进行研究设计,并不断改进和完善。张守海等在设计4HBLZ-2智能型半喂入花生联合收获机时,首次应用液压驱动履带自走式底盘、液压控制技术、北斗导航系统、产量检测技术、仿形技术、工况监测与反馈控制技术、综合调度平台技术。为解决适用于四川、贵州等丘陵地区的花生收获机严重不足的问题,刘浩基于丘陵地区的地势条件设计一种具有挖掘、藤蔓升运、花生摘果等功能的小型化花生收获机。于昭洋针对切流式花生全喂入联合收获机,设计一种风筛组合、无阻滞、大小杂并除的清选机构。袁鹏飞等设计了一种4HLZ-130型智能自走式花生联合收获机摘果机构。
4 结语
近年来,适用于不同产区的花生收获机械不断完善。但我国地理环境复杂多样,花生收获机械的区域发展不平衡,平原地区的种类明显多于西部地区。从总体来看,缺少适应性强、可靠性高、技术成熟的花生收获机具。在此情况下,应根据主栽的直立型花生的特点,研究设计性能可靠、适用性强的花生收获机械,并不断改进和完善,为提高花生生产综合机械化水平提供机具支持。同时,借鉴美国农机与农艺密切融合的经验,建立有利于机械收获的栽培制度和种植模式,构建高产、高效、低耗的花生收获体系。
参考文献
[1] 陈中玉,高连兴,ChenCharles,等.中美花生收获机械化技术现状与发展分析[J].农业机械学报,2017,48(4):1-21.
[2] 高连兴,刘维维,王得伟,等.典型花生收获工艺流程及相关机械术语研究[J].花生学报,2014,43(3):26-30.
[3] 王得伟.铲链式花生起收机翻转放铺装置的试验研究[D].沈阳:沈阳农业大学,2016.
[4] 陈有庆,王海鸥,胡志超.半喂入花生联合收获损失致因与控制对策研析[J].中国农机化,2011(1):72-77.
[5] 郭伟宏,郭辉,于欣东,等.基于两段式收获工艺的花生起收机设计及试验[J].中国农机化学报,2020,41(7):34-39.
[6] 孔萍萍.小型铲辊式花生起收装置的试验研究[D].沈阳:沈阳农业大学,2016.
[7] 张守海,李洪迁,李政平,等.4HBLZ-2智能型半喂入花生联合收获机的设计与试验[J].农机化研究,2020,42(9):93-98.
- 我国现代高速公路机电通信系统设计及应用
- 《网络安全法解读》
- CAN现场总线在立体车库领域的应用
- 区块链技术的发展与前瞻
- 高职院校校园网络优化设计与实现
- 网络安全法下《计算机网络安全风险评估》改革初探
- 海洋信息网建设下移动OA系统的设计与实现
- 数据加密技术在计算机安全中的应用策略探究
- 手机媒体冲击下的高职校园文化建设
- 云计算背景下计算机安全问题及对策分析
- 论计算机网络技术在电子信息工程中的实践应用
- 气象部门计算机网络系统运行管理和维护探讨
- 虚拟环境下蜜罐系统的部署
- 基于文件监控和自定义判定树的网页防篡改机制
- 云计算安全风险因素及应对策略
- 基于校园网的IPv6过渡技术研究
- 高职院校电子商务创新创业人才培养体系构建研究
- 运用计算机知识做好办公室内勤管理工作
- 试谈医院信息科内部构建和管理的思路
- 原生态农产品营销的电商平台设计研究
- 国内电子健康档案系统分类与问题探讨
- 网购消费者信息安全问题研究
- 我国互联网医疗存在的问题及对策
- 一种自助式智慧图书馆系统的数据库设计与实现
- 基于数据挖掘的房价预测分析
- deallocation's
- idiom
- idiomatic
- idiomatical
- idiomatically
- idiomaticalnesses
- idiomaticalness, idiomaticness
- idiomaticities
- idiomaticnesses
- idioms
- idiosyncrasies
- idiosyncrasy
- idiosyncratic
- idiosyncratically
- idiot
- idiot/fool
- idiotic
- idiotical
- idiotically
- idioticalness
- idioticalnesses
- idiotish
- idiotry
- idiots
- idle
- 毒蛇咬
- 毒蛇嘴里没好牙
- 毒蛇总是曲走,螃蟹总是横行
- 毒蛇爬竹竿——绞滑(狡猾)
- 毒蛇牙齿马蜂针——最毒
- 毒蛇猛兽
- 毒蛇窝里的小鸡子——不知哪天丧命
- 毒蛇蜇手,壮士解腕
- 毒蛇走路弯弯曲曲
- 毒蛇走路没声音
- 毒蛇进竹筒
- 毒蛇黄鳝分不清
- 毒蛾
- 毒蜘蛛织网
- 毒蜥
- 毒螫
- 毒蠱
- 毒覃当不了蘑菇
- 毒詈
- 毒计
- 毒谋
- 毒贩
- 毒贯
- 毒贼
- 毒资