马乐
摘 要:曲柄摇杆机构在平面四杆机构中占重要地位,本文采用Matlab编制程序进行优化,对其进行运动学仿真分析,验证其性能。创建机构的几何模型,采用Adams和SolidWorks对机构的几何模型进行动力学方面的初步仿真。对从动件摇杆的位姿等动力参数进行简单的分析。
关键词:运动学仿真;位姿;几何模型
DOI:10.16640/j.cnki.37-1222/t.2019.16.217
现有的对曲柄摇杆机构的优化,大多是将基础优化和动力学独立处理。本论文将基于MATLAB的对曲柄摇杆机构的基础优化与动力学分析,使用Adams和SolidWorks对机构的几何模型进行动力学方面的初步仿真。从而提升并验证二维曲柄摇杆机构的综合机能。
1 数学模型的建立
一曲柄摇杆机构,曲柄杆长参数定为1,机架杆长参数定为6,要求为:曲柄从运转到时(即),摇杆的位置角变化再现最佳的已知運动规律:
已知杆件长度:曲柄,机架,为极位角,规定传动角在:
运行编制的MATLAB程序后,得到输出结果:
连杆及摇杆杆长参数。
摇杆已知运动规律与实际运动规律最小差值。
2 曲柄摇杆机构的动力仿真分析
(1)建立模型。按照前文机构整体优化后得到的各构件尺寸参数,各杆件尺寸定为,曲柄的角速度设定为。
打开Adams/View,按照前文计算得到的各个杆件尺寸建立机构几何模型,利用某一时刻机构存在的特殊位姿来定位机构各个杆件,本文选择曲柄右与机架共线的位置。界面见图2-1所示。
利用余弦定理来求解夹角,确定连架杆与机架所成锐角大小为,建立机架,然后依次建立摇杆、曲柄、连架杆。
(2)添加约束。四个构件,两两之间添加回转副约束即可。
在曲柄摇杆机构中机架默认是固定的,在机架(frame)和工作区域构建固定约束。
(3)为曲柄添加驱动。二维曲柄摇杆机构中,生成数字仿真模型时需要为原动件——曲柄添加驱动。
(4)仿真。应用Simulation完成仿真。在【end time】参数框中输入12,在【steps】参数框中输入100。为防止机构仿真时出现崩溃error,在仿真前,先完成静态Verify,再进行仿真计算。
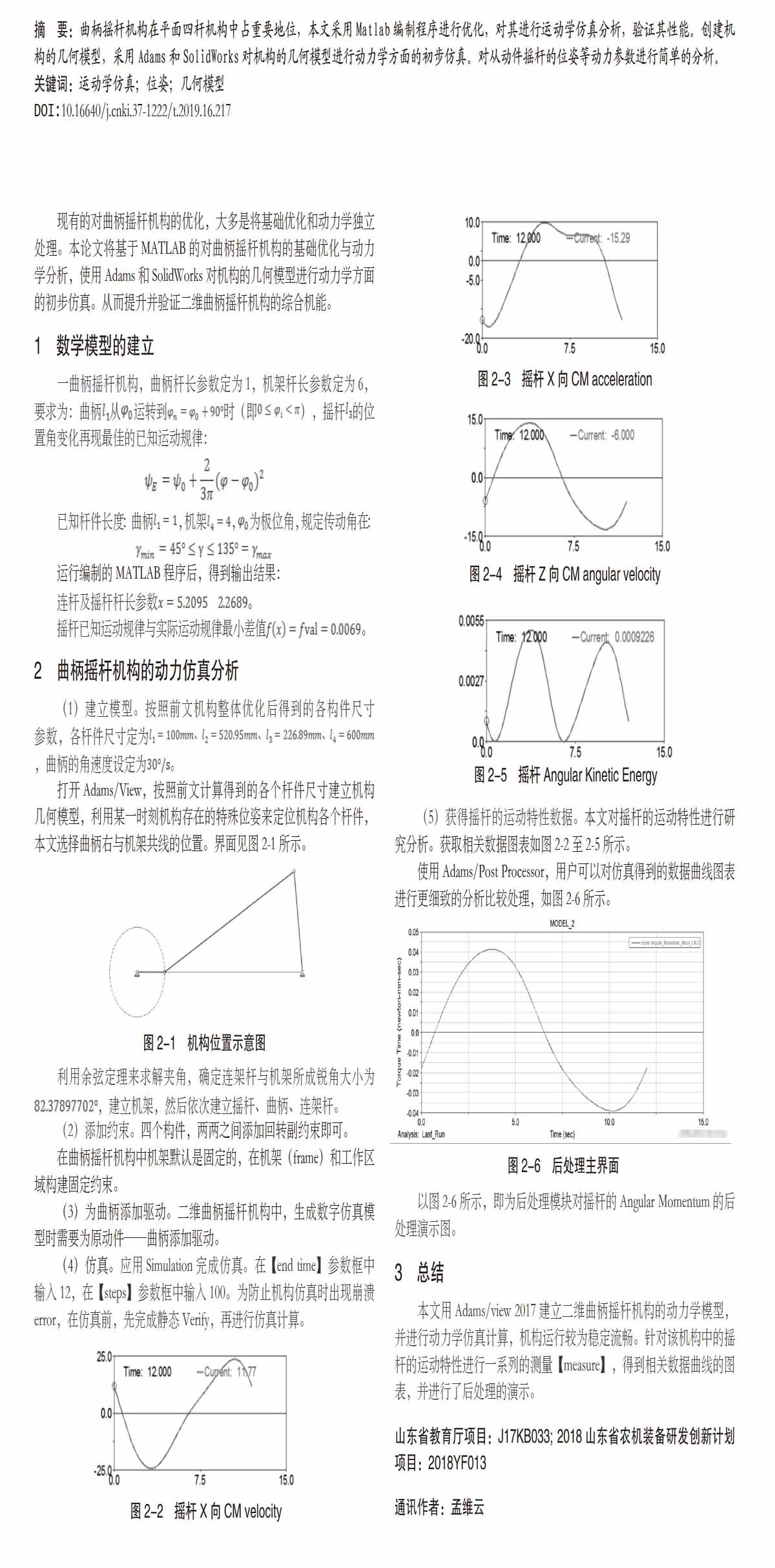
(5)获得摇杆的运动特性数据。本文对摇杆的运动特性进行研究分析。获取相关数据图表如图2-2至2-5所示。
使用Adams/Post Processor,用户可以对仿真得到的数据曲线图表进行更细致的分析比较处理,如图2-6所示。
以图2-6所示,即为后处理模块对摇杆的Angular Momentum的后处理演示图。
3 总结
本文用Adams/view 2017建立二维曲柄摇杆机构的动力学模型,并进行动力学仿真计算,机构运行较为稳定流畅。针对该机构中的摇杆的运动特性进行一系列的测量【measure】,得到相关数据曲线的图表,并进行了后处理的演示。
山东省教育厅项目:J17KB033; 2018山东省农机装备研发创新计划项目:2018YF013
通讯作者:孟维云
- 果树栽培技术对提高果实品质的影响分析
- CR400BF型动车组中央控制单元停机故障与改进措施探讨
- 一维定态薛定谔方程的理论求解及MATLAB的仿真实现研究
- 基于系统动力学的多供应点、多需求点防汛物资配送研究
- 四川省公园城市试点建设基础评价
- 国内外特色小镇建设经验与启示探讨
- “工作的自我概念”对春节旅游的影响研究
- 基于旅游数字足迹的国内游客旅游行为分析
- 三亚中医药养生旅游决策影响因素研究
- 新县全域旅游发展模式、问题与对策分析
- “互联网+”时代基于游客需求的旅行社 产品创新研究
- 新时代无锡休闲农业的品牌发展研究
- 蛋白组学在肝癌中的应用研究
- 针灸治疗原发性痛经的进展研究
- 海船船员考试与执业医师考试的比较研究与借鉴
- 公务员交流意愿不均衡的现状、成因及对策
- 农村籍大学生返乡创业意愿提升研究
- 基于实训教学平台的“校企精准对接, 精准育人”人才培养机制研究
- 家长式领导对组织文化的影响研究
- 对于“两面人”行为角色复杂性的分析
- 高职学生“工匠精神”培育的必要性研究
- 互联网企业“80后”与“90后”员工对企业文化接受程度差异的分析
- 环境规制、技术创新与区域产业升级的关联机制研究
- 环境治理对经济发展的影响研究
- 乡村振兴战略下金融科技支农的风险与防范研究
- be at the controls
- beat-the-drum
- be at the end of your tether
- be at the height of your powers
- beat-the-rap
- beat the rap
- be at the root/bottom of
- beat-the-tar-out-of
- be at the top
- be at the top of the agenda
- beat-the-wind
- be attracted to
- be attracted to sb
- beat-up
- beat up
- beat up on
- beat up on sb
- beat-ups
- beat ups'
- be a turn-off
- be a turn-on
- be at war
- be at work
- be at your peak
- be at your wits' end
- 活人的魂魄
- 活人眼里伸拳头
- 活人让尿憋死
- 活人读死书,可以把书读活;死书读活人,可以把人读死
- 活人跳进滚水里
- 活人门闩
- 活件
- 活份
- 活伶伶
- 活似
- 活体
- 活体组织检验
- 活佛
- 活使响了
- 活使闷了
- 活便
- 活信
- 活像
- 活儿
- 活冤业
- 活冤孽
- 活分
- 活利贷
- 活到老
- 活到老学到老,还有三分没学好