任金生

摘要:本文结合京沪上行线跨京沪高铁特大桥主跨上构采用转体法施工实例,阐述了转体法施工时的球铰安装、滑道及撑脚安装、牵引系统设计、称重、转体及控制等关键技术。
Abstract: This article combines the construction of the upper structure of the main span of the Beijing-Shanghai high-speed rail bridge across the Beijing-Shanghai upstream line using the swivel method to explain the key technologies, including the installation of the spherical hinge, the installation of the slide and the support, the design of the traction system, the weighing, and the swivel and control.
关键词:转体梁;球铰安装技术;称重;转体控制
Key words: swivel beam;spherical hinge installation technology;weighing;swivel control
中图分类号:U445.4 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文献标识码:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章编号:1006-4311(2020)25-0152-03
0 ?引言
国内第一座梁体采用转体法施工的桥梁为1977年的遂宁建设桥,此后得到迅速发展,至今成功采用转体法施工的桥梁已逾百座。转体梁施工的吨位也从最初的几百吨,一再刷新至现在已超过万吨。同时,桥梁转体法施工在铁路、公路、市政等不同领域;在拱桥、梁桥等不同桥型;在平转、竖转等不同类型的转体法施工方面均得到了广泛应用。由于转体吨位不断刷新及为了将转体法推广在更大的范围内应用,故对于转体技术的研究、创新和发展总在持续进行中。
1 ?工程简介及转动体系简介
京沪上行线跨京沪高铁特大桥于 L2DK2+170 与京沪高铁相交,相交角度 44°,采用 2×56mT 构跨越,主墩为56#、57#。2×56mT构梁体为箱梁,采用单箱单室、变高度、变截面结构。梁顶宽 4.9m,底宽 3.2~4.0m,高 3.0~6.0m。主跨的桥墩设计为单线圆端形实体墩,采用钻孔灌注桩作桥墩基础。
2×56mT 构采用偏位支架法现浇后平转就位法,平转体系结构由环道滑道、球铰及牵引系统等构成。其中球铰由下球铰钢骨架、下球铰(与承台共同构成下转盘)、球铰间聚四氟滑动片、上球铰(与桥墩共同构成上转盘)及联结上下球铰的销轴构成;环道滑道由滑道、双筒支撑脚构成;牵引系统由牵引反力座、钢铰线、助推反力座等构成。平转体系结构如图1所示。
2 ?转体桥施工技术研究及质量控制
2.1 核心部件(球铰)制造及质量验收
2.1.1 球铰制造厂的选择
对于转体梁而言,转动体系的核心结构无疑是球铰,是本项目T构成功转体的关键,故其制造质量是否符合规范及设计要求决定了转体能否成功的基础,必须严格保证球铰的制造精度和现场安装质量,本项目委托了代表国内最高水平的中国船舶重工集团公司第725研究所进行球铰的制作,从根本上确保球铰的制造质量。
2.1.2 严格球铰的质量验收
根据规范及设计要求,对厂家生产的球铰实行严格质量验收,验收指标控制如表1所示。
2.2 球铰安装质量控制
2.2.1 下球铰的钢骨架安装
下球铰的钢骨架不仅要起到固定、定位下球铰的作用,还需具有调整球铰高程的功能,故钢型骨架的功能设计及安装质量是保证下球铰安装质量的前提。
严格按设计进行钢骨架的安装和预留联接下球铰的螺栓位置,骨架安装完毕,经验收合格后,安装紧固螺母。为了调整下球铰标高,在骨架上安装精调精度0.5mm为M20×0.5的细牙螺杆。
2.2.2 安装下球铰
用汽吊将下球铰吊装至钢骨架上,先调整下转盘中心至设计位置。随后通过上下转动细牙螺杆,以精调下转盘标高。调整时采用全站仪、电子水准仪(量测精度为0.01mm)及铟钢尺进行量测及复核。
下球铰调整合格后,擰紧调整螺栓上的螺母,以固定下球铰横梁,使下球铰在竖向得以固定。再利用承台上预埋型钢对下转盘进行横向固定。
由于盘下结构复杂,且上覆大面积的下球铰,混凝土浇筑质量控制难度大,砼密实情况是下球铰安装成败的关键。本项目在下球铰面上均匀布设了4处直径15cm的混凝土振捣孔,同时均匀布设足够数量的排气孔。砼浇筑时按从下转盘中心依次向外的顺序捣固,在采取水平方向伸入转盘下捣固的同时,由振捣孔插入振捣器进行盘下砼的捣固。以砼面不再下沉,且有较多水泥浆从周边排气孔冒出为好,确保捣固密实。
2.2.3 安装聚四氟滑动片及上球铰
安装顺序及操作要点:①将两个球铰的球面清理干净;②将黄油四氟粉装进中心销轴套管中;③把聚四氟乙烯滑板放入下球铰凹坑内,并在四氟乙烯滑板之间的空隙填满黄油四氟粉;④上球铰采用25t汽吊吊装,将中心销轴对准销轴套管后缓缓落下,进行上球铰精确对位;⑤球铰安装完毕后人工施力试转动,最后采取锁定措施。
完成下转盘的砼浇筑后,在预埋的套管中插入转动销轴。冲洗干净球铰表面及滑片镶嵌凹坑上沾附的砼块及杂物,并吹干。根据四氟乙烯滑片编号装入对应的镶嵌凹坑上,装好的滑片顶面标高应处于同球面上,控制其误差在1mm内。
在下球铰球面上涂抹黄油聚四氟乙烯粉,使其均匀的充满滑动片之间的空隙,并略高于顶面,涂抹完成后尽快安装上球铰,其间严禁杂物掉入球铰内。上球铰精确定位并临时锁定限位后,用胶带严格包裹上下球铰接合面,以避免杂物进入上下球铰间。
2.3 滑道及撑脚安装
2.3.1 滑道安装
在支撑脚的下方设有宽110mm的环形滑道,转体时支撑脚沿滑道滑动,以确保T构平稳转体。滑道在专业厂家分段制作后现场拼装,因滑道表面的平整度影响到转体牵引力的大小及T构转体的平稳度,故要求整个滑道面在同一水平面上,其相对高差不大于2mm(平整度要求较高,现场二次验收)。本项目在滑道下支撑骨架上设置精度0.5mm的M20×0.5的细牙螺杆精调及固定滑道面标高。
2.3.2 撑脚安装
在转盘上设置了8组双筒式悬吊撑脚(撑脚内填充微膨胀砼),在完成上球铰安装就位后即安装撑脚。根据本项目T构的具体情况,撑脚与滑道的间隙按25mm设置。并于转体前在滑道面铺设四氟乙烯板。
为确保桥墩及梁部施工时球铰结构均匀受力、不出现移位及便于拆除,用砂箱(经过预压)将撑脚与环道之间塞死。
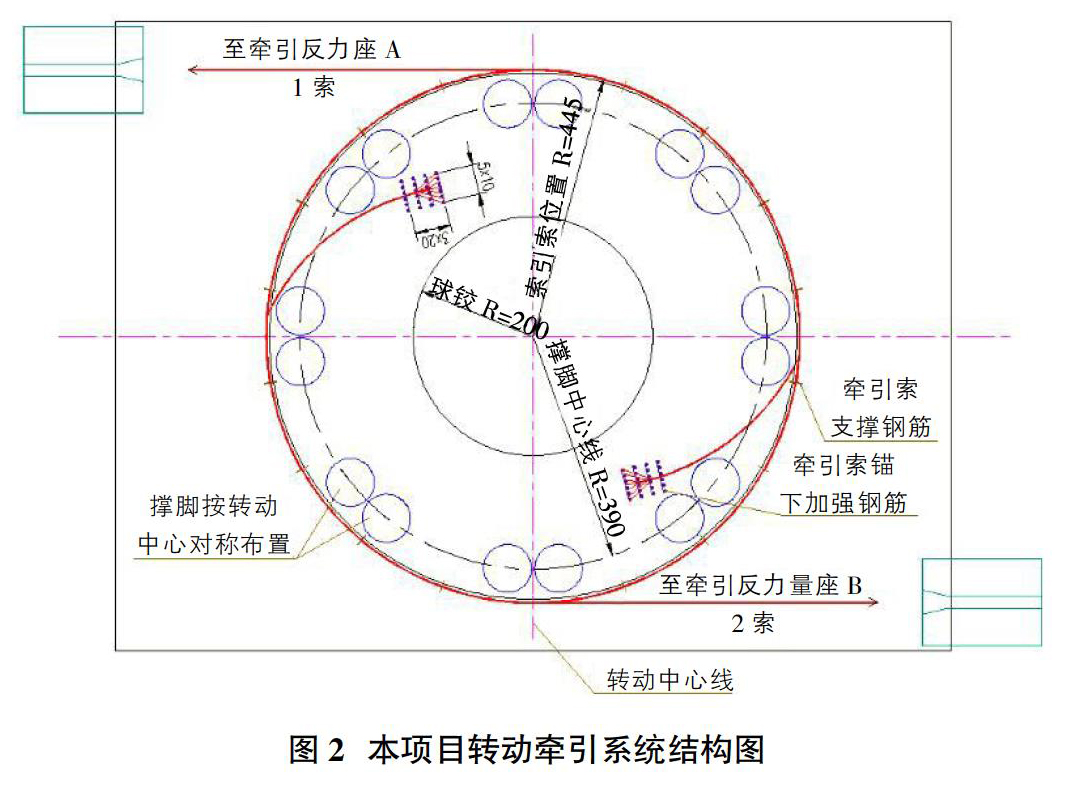
2.4 转动牵引体系安装
转体系统由动力提供系统和球铰、环形滑道、支撑脚、牵引钢绞线等构成。动力系统又分成牵引系统和助推系统两部分。如图2所示。
2.4.1 牵引动力系统
本项目采用2套共4台ZLD100型连续牵引系统进行T构的转体,此系统由液压泵站、电脑智能控制系统、连续千斤顶构成。经过张拉环绕在上转盘的两束19-ΦS15.2钢绞线,形成水平的旋转力偶,使T构沿球铰转动就位。本系统具有液压、多千斤顶自动连续及确保两束钢绞线同步的优点。即电脑智能控制系统能够确保多台千斤顶同步不间断匀速牵引T构旋体对位,保证T构转体平稳、连续进行。该系统具备手动和自动两种控制功能,在正常转体过程时可开启自动控制功能。在T构最终对位微调时启用手动控制功能。
安放好的连续千斤顶中心线与上转盘外圆相切。千斤顶在上转盘两侧对称布置,其中心线处于同一水平面内,且与转盘中预埋的牵引钢绞线同高度。采用高强螺栓把千斤顶与反力架联结牢固,反力架与反力墩间焊接固定。
转体时将主控台设于视线良好,能够通视全场的位置。
2.4.2 牵引索
牵引索采用两束19根ΦS15.2钢绞线,于上转盘上对称预埋,预埋前将钢绞线表面的锈斑、油污需清理干净。钢绞线沿既定位置有序排列,圆顺缠绕在上盘上,且外端穿过千斤顶。先用千斤顶依次对钢绞线单根预紧,最后再整体预紧,需确保每根钢绞线的预紧拉力要基本相同。
为了避免出现千斤顶施力时钢绞线出现扭转,并带动千斤顶转动的状况。预埋钢绞线时,使钢绞线缠绕方向50%为顺时针,50%为逆时针。
牵引钢绞线埋入上转盘端设P型锚固定,钢绞线埋入转盘砼内超5m以上,锚处设置加强筋。在钢筋焊接过程中避免对钢绞线造成损伤。在上转盘砼浇筑前预埋牵引索支撑钢筋,并在牵引钢绞线中心线处预留25cm深的半圆形槽口。
钢绞线伸出上转盘处要圆顺;预留牵引长度要足够,确保完成转体后还有一定的余量;完成安装后要对钢绞线进行保护,避免电焊打伤或是电流通过钢绞线;对外露钢绞线抹油并包裹保护,避免受湿锈蚀。
2.4.3 反力架和锚固构件
本项目采用型钢及钢板制作反力架和锚固构件。在承台上安置反力架,反力架按牵引力大小进行结构设计。承台施工时注意预留反力架的槽口,在完成梁部施工后开始安装反力架,精确调整至设计位置后固定,澆筑槽口处砼。
3 ?转体过程控制
3.1 转体施工前准备
3.1.1 气象条件
T构拟转体施工前1周,与气象部门沟通,确保T构转体施工时风力不超过3级,且无其它影响转体施工的恶劣天气。
3.1.2 设备调试
设备在使用前进行标定,之后对系统进行空载联试,以确定全部设备正常运行并满足转体要求。
3.1.3 拆除临时固结
完成梁部施工,且拆除脚手架后,在千斤顶的配合下,按次序将固定支撑脚的砂箱取出,在滑道上铺设四氟乙烯板。
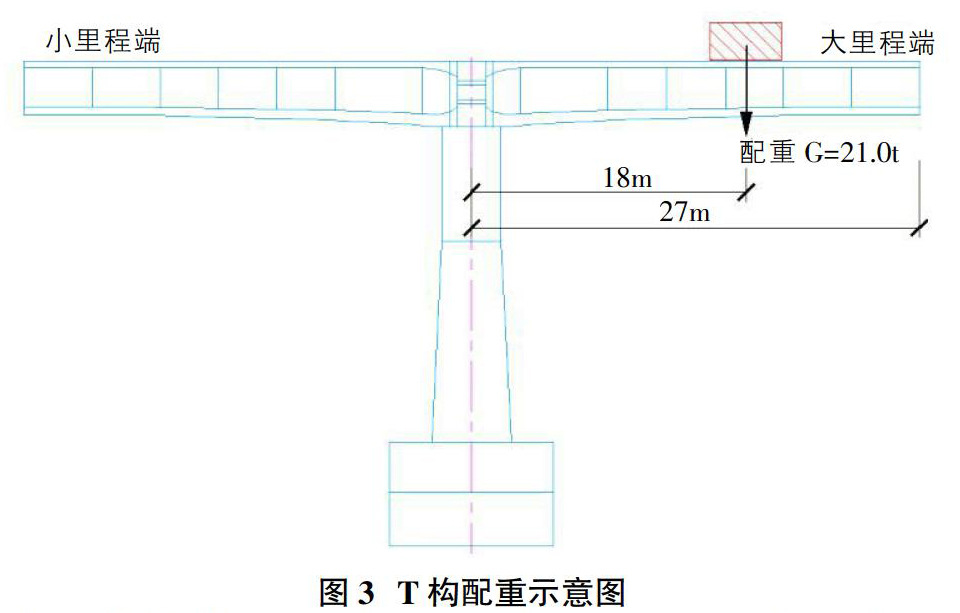
3.2 称重及配重
在T构转体前需进行称重,测定T构两端的不平衡力矩、偏心距、摩阻系数等,作为T构配重及牵引力计算的依据。以确保T构转体平稳、安全进行。
据以往施工经验,当偏心距小于5cm时,T构处于脆弱的平稳状态,转体过程中T构易出现大幅摆动的不安全现象,当偏心距处于5~15cm范围内为最安全。
本项目采用千斤顶在上转盘下施加竖向力,测定球铰由静摩擦状态到动摩擦状态的临界值,再计算出所需参数的称重方法。
本项目通过称重试验,测定出56#墩上的T构偏心距为17.5cm,采用砼块在T构大里程端增加21t配重,将偏心距调整至10.3cm,配重如图3所示。
测定出57#墩上的T构的偏心距为6.9cm,符合规范要求,不需进行偏心距的调整。
3.3 试转
所有工作安排妥当后,先进行试转,以对球铰体系、施力体系、防倾保险体系和位移控制体系的状态进行全面检测,经试转检查无误后方开始正式转体。
建立球铰转动角速度与梁端线速度的对应关系,并在转盘上标识对应线速度的刻度,以便将转速控制在合理范围内。
3.4 正式转体
①根据试转所获得数据进行经验总结,优化、调整转体方案,检查各種设备及滑道状态是否良好,进一步完善正式转体的准备工作。
②在关键部位,重点施工环节做好周密部署,做好人员分工与协作,编制应急预案,并做好应急准备工作。
③转体在现场总指挥的统一指挥下,先使千斤顶达到预定吨位,在自动控制功能下启动动力系统设备。
④两侧对称千斤顶顶力由主控台智能控制,确保其顶张力始终大小相同,以避免出现不衡力矩。
⑤T构转体时,各人员均要坚守岗位,密切观察、监控设备运行、T构转体情况,并做好施工记录。
⑥在转盘上设置限位装置,以避免T构转动过量。
3.5 转体精确控制
且当T构转动接近就位时,停止系统的自动转动功能,改为手动点动控制,以防止超转,确保精确对位。
单次点动时千斤顶行程为1mm。每实施一次点动,均要由测量人员测报梁端转动数据,持续点动及测报数据,直至两个T构精确对接。
当T构出现横向倾斜,或是对接处存在高程偏差时,采取在转盘处设置千斤顶顶升进行调整。
3.6 固结上下转盘
T构转体精确对位后,即进行上下转盘间的约束固定。
在支撑脚与滑道间的空隙内楔入钢板抄垫固定,且钢板与支撑脚、滑道面钢板全面焊接联接,避免已精确对位的T构出现轻微偏移现象。
用高压水冲洗下转盘表面,绑扎及焊接预留钢筋,立模后浇筑混凝土,使上下转盘封固成整体。封固采用微膨胀混凝土,以增强填充、封固效果。
4 ?结束语
桥梁上构采用转体法施工,具有经济、快速、安全等优点,施工设备省、施工简便,适用于施工条件受限地方的施工。由于转体施工不影响交通,在跨越既有铁路、通航河流、城市立交桥方面,及大跨度、低净空等方面转体法施工将会得到更为广泛的应用,本项目转体桥的成功实施,可为同类的桥梁上构转体法施工提供参考。
参考文献:
[1]王雄,张鹏,姚文斌,王莹.南五环跨线桥悬浇及转体综合施工技术[J].市政技术,2010(S2).
[2]杨公新,刘慧利.大跨度转体施工T构桥转动结构分析[J].山西建筑,2011(20).
[3]杜瑛.高速公路跨铁路桥2_50mT构转体施工方法[J].黑龙江交通科技,2011(9).
- 化学教学中构建和谐师生关系的重要性
- 趣味化学实验在初中化学教学中的应用
- 化学实验教学中存在的问题及对策
- 设计问题链,引领初三化学专题复习新潮流
- 中学物理中常用的数学极值方法
- 如何通过小组合作学习提高初中物理实验效果
- 浅谈物理课堂教学与学生的素质教育
- 加强高中物理竞赛训练必要性的探讨
- 浅谈在中学物理教学中如何培养学生的发散性思维
- 静电演示实验疑难探析
- 渗透教育在高中物理学中的应用
- 基于核心素养
- 巧用对称性,求解物理问题
- 有关浮力问题的几种解题方法
- 初中物理教学中合作学习探究应用
- 数字化资源在初中物理教学中的应用
- 刍谈引导学生在物理学习中反思的策略
- 高中物理教学中学生创造性思维的培养
- 注重创新能力培养,构建物理高效课堂
- 大学物理研究型教学方法初探
- 如何在高中物理教学中实施科学探究教育
- 小学数学教学中培养学生抽象思维的策略探讨
- 小学数学趣味教学的探讨
- 授之以鱼不如授之以渔
- 黑板变“白板”,课堂更精彩
- ingratiated
- ingratiates
- ingratiate yourself
- ingratiating
- ingratiatingly
- ingratiations
- ingratitude
- ingratitudes
- ingratitude's
- ingredient
- ingredients
- in-ground
- ingrowth's
- inhabit
- inhabitabilities
- inhabitable
- inhabitant
- inhabitants
- inhabitation's
- inhabited
- inhabiter
- inhabiters
- inhabiting
- inhabitress
- inhabits
- 气勃勃
- 气勇
- 气包儿
- 气包子
- 气包鱼
- 气化
- 气卵子
- 气厉青云
- 气压
- 气压山河
- 气压水瓶
- 气厥
- 气可以养而致
- 气可鼓而不可泄
- 气吁吁
- 气合
- 气吐幽兰
- 气吐眉扬
- 气吐虹霓
- 气向上蒸发
- 气吞万里
- 气吞云梦
- 气吞宇宙
- 气吞寰宇
- 气吞山河