赵传丰
【摘要】对伪码体制中的码跟踪环路设计进行了详细分析,对整个环路的各个部分设计都进行了较为详尽的分析,具备一定的参考价值。
【关键词】 伪码 码环 延迟锁定环鉴别器 环路滤波器 载波辅助 载波环
一、引言
随着电子技术的发展,伪码调相及其各种复合体制(统称为伪码体制)由于具有良好的抗干扰能力和测距、测速能力,现已成为通信导航领域中重要的发展方向之一。
本文对伪码体制数字接收机的延迟锁定环(DLL)、环路滤波器、码环的载波辅助等进行分析,分析了DLL鉴别器,环路滤波器的阶数和噪声带宽对性能的影响,存在多普勒情况下码环的载波辅助功能。通过上述分析,详细阐述了伪码跟踪环应对不同复杂环境下的详细设计。
二、码跟踪环路结构分析
在系统设计中,伪码的同步可分为粗捕获、细跟踪2个过程,粗捕获可以减少系统的搜索时间,细跟踪可以提高系统的精度测量。通过粗捕获可使本地码与接收码保持基本同步,获得二分之一码元宽度的同步精确度,通过精跟踪可以使码片位置精确锁定跟踪位置。
其工作原理为:经AD采样后的数字中频信号通过载波剥离后,输出I和Q两支路信号,进入到相关器(码剥离)和积分清洗器后,得到三组信号,分别为超前、即时、滞后。三组信号通过DLL码环鉴别器,鉴别器输出的相位差经过环路滤波后,与载波环提供的多普勒辅助、码NCO偏差一起送入数控振荡器。码NCO产生两倍的码发生器时钟速率2fc0,并且将其送至移位寄存器。利用这种组合,码发生器的输出经移位寄存器产生两种相位延迟滞后的版本,结果存在三种复现码相位,分别为超前(E)、即时(P)、滞后(L)。E和L之间通常相差一个码片,P位于正中间,这样就构成了整个伪码跟踪环路。
三、延迟锁定环(DLL)鉴别器
常用的延迟锁定环有4种,有归一化的超前滞后包络、非相干超前减去滞后功率、准相干点积功和相干点积,其中归一化的超前滞后包络鉴别器因其输出误差在1个码片的范围内呈线性而得到了广泛采用,算法为1/2(E-L)/(E+L)。
如果复现码是对准的,那么E=L,鉴别器输出为零,不产生误差信号,如果复现码没有对准,那么E≠L,相差的大小与复现码和输入信号之间码相位误差的大小成正比。码鉴别器检测出复现码的偏差大小和方向(超前或滞后),这个偏差经过滤波后加到码环的NCO上,使其输出频率做必要的增加或减小,以根据接收到的发射码相位纠正复现码发生器的相位。
四、码环滤波器
环路滤波器的用处是降低噪声以便在其输出端对原始信号产生精确的估计,环路滤波器的阶数和噪声带宽决定了环路滤波器对信号的动态相应。
在接收机与被测目标较远时,到达接收机的信号变得非常微弱,接收机工作时产生的随机噪声会引起跟踪环路测量偏差加大,还有高动态环境中接收机与被测目标之间的相对运动的影响,也会使接收机同步电路对信号参数估计的误差增大。由于热噪声引起DLL环的跟踪误差为:σtDLL={Bndn0/2c[1+2n0/Td(2-d)c]}1/2,σtDLL是伪码跟踪误差;Bn是伪码跟踪环路等效带宽;Td是积分时间;d是超前滞后相关器间隔,是关于一个码片的归一化值,通常为1。
从上式可以看出,在设计码跟踪环路时,环路带宽是影响伪码跟踪热噪声误差重要参数。下图为环路在不同带宽下的跟踪性能,d取1,Td取50ms。从下图可以看出,在信噪比较低时,环路跟踪的均方根误差受带宽影响很明显,而且环路的带宽设计越窄,环路对噪声的抑制能力就越强。接收机要在低信噪比环境下可靠工作,带宽就必须设计的窄一些。当信噪比较高时,环路性能受带宽的影响就较小了。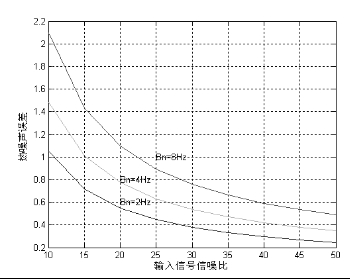
由载体动态引入的多普勒频移表示为:fd=(v/c)fc;为了分析动态特性对接收机跟踪环路的影响,将多普勒频率在t= 0时刻进行泰勒级数展开可得:fd≈f0+f1t+1/2f2t2;f0为多普勒频率,f1是一阶变化率,f2是二阶变化率,其余项忽略。f0、f1、f2的大小分别与接收机速度、加速度、加加速度有关。
由于多普勒频率的影响,伪码相位R在t0=0附近展开可表示为:R(t)=R0+R1t+1/2R2t2+1/6R3t3;表示多普勒分量对伪码相位不同的影响,要在接收机中准确解调接收到的信号,码跟踪环就必须按照载体的动态性能来设计,不同多普勒分量要求不同阶数、不同带宽的跟踪环,否则环路容易失锁。
理想情况下,一阶环路滤波器对速度应力敏感;二阶环路滤波器对加速度应力敏感,;三阶环路滤波器对加加速度应力敏感。
非相关超前滞后跟踪环阈值的经验值标准为测量误差均方根的3倍,应不超过相关器相关间隔的1/2,即:σDLL=σtDLL+Re/3≤d/6;σDLL为测量的均方根误差,σtDLL为热噪声引入的均方根误差,Re为接收机动态引入的误差。由上式可得:Re≤d/2-3σtDL。
由以上分析可知,环路带宽的选择需折中考虑环路的噪声误差和环路的动态性能。如果把信噪比做为调整环路带宽的标准,就可以设计出最佳的自适应带宽,从而减小跟踪误差。
五、码环的载波辅助功能
载波环滤波器的输出按比例因子调整后作为辅助量加到码环滤波器的输出端,被成为载波辅助的码环。因为信号上的多普勒效应与信号的波长成反比,所有需要有一个比例因子。由此,对于接收机与被测目标之间的相对速度,在载波(或者中频)上的多普勒比在码上的多普勒要大得多。
载波环的输出应一直对码环提供多普勒辅助,这是因为载波环颤动比码环颤动的噪声要小几个量级,因而准确的多。
六、结论
本文详细论述了伪码体制中码环的设计,对码环路中的DLL鉴别器进行了分析,对环路滤波器的特性进行了分析,给出了自适应最优带宽的概念,针对接收机与被测目标之间的动态性,对码环的载波辅助因子进行了描述。
参 考 文 献
[1]“GPS原理及应用”,Elliott D.Kaplan,电子工业出版社.
- 影响力受贿罪的犯罪构成及司法适用
- 自侦案件审查决定逮捕上提一级应注意的四个问题
- 延伸联合督查触角 确保实现“三无”目标
- 涉农检察工作大有可为
- 建立侦诉审一体化快速办案机制的思考
- 对现行民事执行监督制度的反思及改进
- 民事抗诉中检察机关调查权的新思考
- 民事检察监督亟待解决的几个问题
- 查办监管场所职务犯罪案件的策略与技巧
- 受委托取款时藏匿现金行为的定性
- 监理人员能否构成重大责任事故罪
- 股市“带头大哥777”的行为构成非法经营罪
- 二手房买卖的陷阱如何定性
- 对侵占罪中“拒不退还”行为的认定
- 致他人倒地被路过车碾死如何处理
- 后邓玉娇时代防卫权的司法控制
- 中国法语境中的检察官客观义务等
- 新时期检察文化建设的实践探索与展望
- 科学发展语境下的法治文明
- 扩大人民监督员监督范围之实证研究
- 实施人文关怀以和谐司法促社会和谐
- 我国现行检察权的中国气派
- 机械的司法和个案的正义
- 检察动态
- 资产追回中的没收制度及对中国的启示
- bakeries
- bakerlike
- bakers
- bakery
- bakes
- bake shop
- baking
- baking/baking hot
- bakingly
- baking powder
- baking powders
- bakings
- baking soda
- baking sodas
- baking-sodas'
- balance
- balance a against b
- balanceable
- balance brought down
- balancebroughtdown
- balancecarrieddown
- balance carried down
- balanced
- balancedbudget
- balanced budget
- r2022090410000089
- r2022090410000091
- r2022090410000092
- r2022090410000094
- r2022090410000096
- r2022090410000097
- r2022090410000099
- r2022090410000100
- r2022090410000102
- r2022090410000103
- r2022090410000104
- r2022090410000106
- r2022090410000108
- r2022090410000110
- r2022090410000111
- r2022090410000113
- r2022090410000114
- r2022090410000115
- r2022090410000117
- r2022090410000118
- r2022090410000120
- r2022090410000121
- r2022090410000122
- r2022090410000124
- r2022090410000125