张文魁 李贺宝 胡新文

【摘要】 ? ?本文将详细介绍可逆式水轮发电机组镜板形貌视觉测量技术的主要内容与理论依据,通过专业的研究与调查,以十三陵电厂水轮发电机组的测量为例,全面展现了定向算法、标定技术、项目应用系统与运用过程等的设计,从而增进了人们对视觉测量技术的了解,在日后的使用中奠定适宜基础。
【关键词】 ? ?十三陵电厂 ? ?可逆式水轮发电机组 ? ?视觉测量技术
引言:
在测量可逆式水轮发电机组镜板的过程中,其会遭受多重要素影响,如测量仪器的精度、不同的采样布点模式或平面度误差等,而视觉测量技术可有效降低其存有的误差,提升电厂内部发电机组的镜板状态。
一、可逆式水轮发电机组镜板形貌视觉测量技术的主要内容
在研究可逆式水轮发电机组镜板形貌视觉测量技术前需了解其要研究的主要内容,具体来说,可重点研究三维视觉几何中的定向算法,如捆绑调整算法、绝对定向算法、相对定向算法、前方交会算法与后方交会算法等,在开展工业近景测量时,若借助像点坐标来预设物体点坐标,其要设定与掌握对应性坐标间的变换关系,如空间直角与平面直角坐标系等。同时,相关人员还可研究相机标定技术,其可作用在高精度的摄影测量下,简单来讲,标定技术会对测量精度产生直接影响,即便是传统相机标定也要借助精度较高的标定块,若想掌握适宜的相机成像模型,技术人员可开展专业性研究,可设置合适的小孔成像模型。在小孔成像模型内其能完成三点共线,即像点、镜头中心与物方点等,由于不存在理想相机,且在摄影期间会遭受多种要素干扰,从而使理论位置与成像平面存有偏差,降低其精准度。此外,若摄影测量系统获取了对应性图像,技术人员还可采用三维重建技术,率先检测其内部标志点,得到该像素的图像坐标,只有标志点检测的精度较高,才能真正提升其摄影测量技术,通过图像内部的中心坐标可开展三维重建工作,从而优化可逆式水轮发电机组镜板形貌,理解视觉测量技术的全部内容[1]。
二、镜板形貌视觉测量技术的理论依据
为提升镜板形貌视觉测量技术的运用水平,技术人员需找到以该项技术为依托的理论依据,经过详尽的研究后找出了以数字照相为基础的测量系统,其测量方式要借力于摄像机,在测量同一物体时可运用不同方位,通过适宜的算法与图像处理来获得对应性空间三维坐标值。相较于旧式的机械导轨测量法,当前的测量方式更为灵活与简单,该系统结构也与先进的测量技术相适应,无论是操作步骤、速度与精度都有了更高的需求。在研究三维重建算法的过程中,借助递增式策略可有效处理无序、大规模的图像,如埃及金字塔、罗马斗兽场的三维重建,通过对该系统的使用,提升了其内部图像序列的有序性,在系统集成化方面还存在一定的提升空间。
当前单摄像机类的视觉测量技术的应用已较为广泛,其在使用期间带有诸多优势,如测量精度较高、成本低、操作便利且系统构成相对简单等,在开展视觉测量的过程中,其会受到特定编码数量的限制,在进行三维重建时只能测量某一物体的一个区域,若想测量大型物体,如飞机等的三维重建要借助相机在其周遭拍摄多种图像,基于图像间的重叠性,有助于提取图像特征,只有保证一定量的图像数据基数,才能让测量工作变得更为精准。
三、水轮发电机组镜板形貌视觉测量技术在十三陵电厂的实际应用
3.1设置定向算法
为掌握视觉测量技术的运用效果,试验人员以十三陵电厂中的水轮发电机组为例,阐述视觉测量技术在该项目中的实际应用。在正式研究该项目时,要设置合适的定向算法,为找出摄像机坐标系与图像坐标系的位置,技术人员需设置图像中心点的坐标,即图像平面与该光轴的交点,uo,vo,在X与Y的方向中还存有不同的物理尺寸,如dx与dy,若想找出X与Y方向中的单位长度内的像素个数,可依据该公式,。当该图像平面在实际成像的过程中,若平面坐标的设置较宽松,主点的像的坐标值应不等于零,其存有的数值将极为微小。部分相机镜头还存在物镜畸变等不良要素,与理论位置相比,其平面中的实际坐标会出现不同程度的偏差,严重影响共线方程的基本形态[2]。
3.2加强标定技术的设计
在开展标定技术的设计前,技术人员应意识到该技术在视觉测量项目中的重要性,该技术水准的优劣将直接影响其测量精度,传统标定技术要根据相机测算出精度较高的标定块,利用该标定块来找出三维点中的坐标与其相关的内外参数。在研究数值相机摄影的过程中,若出现干扰成像要素其相机镜头可出现平面正交畸变、偏心畸变、径向畸变与平面不平畸变等,受多种畸变影响,其会生成误差,从而难以形成共线方程。
具体来说,针对径向畸变而言,当镜头出现径向畸变期间,其理想点与实际像点会沿着径向进行不同方式的偏移,其原因在于镜片会生成不同程度的加工误差,此类畸变的主要特征为其会沿着镜头中心进行合理性对称,该像点的畸变大小与其镜头中心点的距离密切相关。
为改进标定精度,在进行实际标定时技术人员要利用工业摄影测量内的捆绑调整法,在制定出一定的目标后同时测算内外参数,通过整体平差的计算,不仅改善了该摄像机中的内外部参数值,其平面模板内部的特征点也获得了相应改进,找出了适宜的物方坐标。在制定该算法期间,技术人员需仔细考量该标定物中的物方坐標,确认其各项数值,严格控制该坐标可能生成的误差。在镜头畸变的模型内相关人员还要全面考虑薄棱镜畸变、切向畸变与径向畸变等。对于捆绑调整法的使用,技术人员仅需掌握各物方点间的距离,找出物方点、相机外部与内部的参数坐标值,从而完成相机标定。
3.3设置适宜的项目应用系统
为保障三维坐标的测量效果,技术人员要设置适宜的三维重建系统,其具体流程主要为开展大规模的图像序列,借助图像特征间的关系完成匹配,继而进行增量式重建,再利用适宜的方法找出各坐标内部的测量点与对应图像[3]。
一般来讲,在使用大规模图像序列期间,技术人员应找出各图像特征间的关系,通过对其特征的提取来完成匹配工作。在进行增量式重建时要设置出合理的三维坐标系统,在计算機互联网中设定初始化模式,并挑选出最优的初始对,再通过计算测算出初始项的三维模型。在研制三维模型的过程中还要重建三角法,若其需要处理相应图像可适时增加图像,通过PnP求解来达到图像处理效果,借助全局光束平差来找到各项三维点的坐标,继而提升视觉测量技术的测量水准。
3.4项目运用过程
在使用该项目前,技术人员应确认可逆式水轮发电机组视觉检测体系的构成,在该系统中其主要带有光源背景、被测镜板、CCD相机、图像采集卡、计算机互联网系统等,透过数据、图像的采集与处理来完成对应的视觉检测工作。
一般来讲,在应用视觉测量技术时工作人员应科学打开光源,利用相机来开展环绕拍摄工作,利用相应算法在完成图像照片的处理后获得与镜板形貌有关的数据信息,该系统的内部系统含有测量编码点、XXD摄像机与光源,并在互联网计算机中完成软件系统的设计,其在处理镜板图像的过程中要严格遵照该体系内部的实际要求,以获取镜板尺寸类的数据。同时,在测量可逆式水轮发电机组镜板形貌期间,除了要测量该镜板的外形三维尺寸外,还要科学分析镜板内部的平面度、测量装配圆柱中的圆柱度、研究镜板平面与装配圆柱轴线的垂直度等,在完成相关数据的测量后,要依照摄影测量软件中的各类步骤合理处理对应性照片,该软件可依照该照片的特征点进行自动扫描,通过对其同名点的匹配来掌握其具体数值,以此来掌握该三维坐标中的所有测量点。
具体来说,根据视觉测量技术的应用现状,技术人员有效掌握了镜板平面的测量数据,如表1所示。
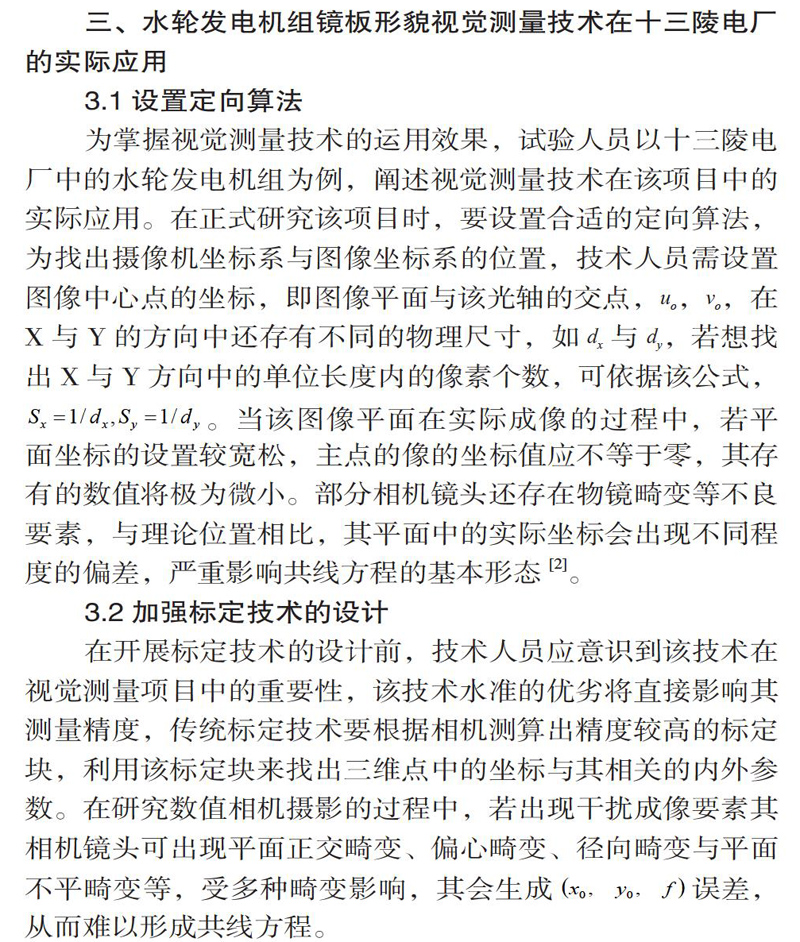
透过表1中的数据,技术人员可切实掌握镜板平面内的测量数据,依照算法中三维坐标的各项标志点,认真研究水轮发电机组的镜板测量项目,如镜板平面与装配圆柱轴线的垂直度、镜板间的平面度与装配圆柱间的圆柱度等。试验人员还要全面拟合三维坐标中的测量标志点,由于每个点的实际测量值都与预设不同,要合理测算出其各项偏差值,继而评价出该镜板平面的整体质量,增强相关数据的准确性,在三维坐标中圆柱的拟合状态,如图1所示。
四、总结
综上所述,为改进可逆式水轮发电机组镜板形貌,技术人员可采用视觉测量技术,利用该技术全面收集其各类坐标值,在使用该技术的过程中,通过相关算法与捆绑调整法,可有效对比出其测量精度,在掌握了该项算法的核心技术后,给大尺寸零件的测量提供了便宜的条件。
参 ?考 ?文 ?献
[1]李鹏阳,杨文辉,曹利平,等.圆盘类零件几何量机器视觉测量技术研究[J].西安工业大学学报,2020,40(06):598-604.
[2]胡庄稳,陆华才,高文根.机器视觉侧围涂胶检测系统的设计与研究[J].安徽工程大学学报,2019,34(05):47-52.
[3]何越磊,余佳磊,陈猛,等.基于机器视觉测量技术的地铁站台限界检测仪设计[J].城市轨道交通研究,2019,22(08):63-66.
- 新媒体环境下民间公益组织传播能力建设:现状、反思与提升策略
- “新状况”与“老规矩”:关于新媒体新闻操作标准的思考
- 创业实现了当年我做记者的社会理想
- 从争议到共识:西方国家互联网法治之路探析
- 从“明星涉毒吸毒案”看媒体叙事失当及心理究因
- 灾难性事件:对遇难者媒体呈现的反思
- 纸媒缺乏自我革新的勇气
- 孔庆东名誉权案和“公众人物”权益“克减”论
- 论网络新闻的涉“性”问题
- 新媒体时代的话语权博弈
- 中国女性杂志广告中的现代女性身体模式研究
- 超越危机公关:参与式沟通作为新范式
- 复杂国际问题的全景式呈现
- 微博反腐的法制化路径新探
- 微信朋友圈会让我们更相信谣言吗
- 政务新媒体发展现状及对策探析
- 赛博空间与本体重建:新媒体时代人类存在方式的变革
- 传播学视角下的新生代农民工城市适应研究综述
- 电视文化的娱乐转向研究:景观社会的视角
- 台湾新闻媒体发展剖析:从政府控制到资本家操控
- 日本报纸数字化发展战略及启示
- 西方国家传媒治理中的替代性规制
- 全球性媒体事件对城市形象的传播影响
- 中西伤痕电影中的人性和文化背景探析
- 电视综艺节目传播模式创新及路径构想
- recap/give sb a recap
- recapitalize
- recappable
- recapped
- recapper
- recapping
- recaps
- recapturable
- recapture
- recaptured
- recaptures
- recapturing
- recarbonate
- recarburization
- recarpet
- recarpeted
- recarpeting
- recarpets
- recarriage
- recarried
- re-carried
- recarries
- re-carries
- recarry
- recarrying
- 笃敬
- 笃新怠旧
- 笃旧
- 笃暗
- 笃棐
- 笃正
- 笃水鬼
- 笃灾
- 笃烈
- 笃爱
- 笃爱亲属
- 笃爱和睦
- 笃生
- 笃疾
- 笃病
- 笃眷
- 笃睦
- 笃知好学
- 笃磨
- 笃禄学士
- 笃笃
- 笃笃喃喃
- 笃笃定定
- 笃笃末末
- 笃类