摘要:广角或鱼眼镜头拍摄的图像视野大,图像信息量丰富,但是图像畸变失真严重,需要对其进行畸变校正以适应人类观察习惯。FPGA的数据并发处理速度快、可靠性高、体积小等特性为摄像校正系统提供了较好的硬件支持。基于嵌入式FPGA系统,采用等距投影扩展校正算法对畸变图像进行校正,校正过程中不需要烦琐的计算及标定靶标。实验表明,该算法移植到嵌入式FPGA平台上,运算时间短、校正图片清晰,能满足实时性要求。
关键词:鱼眼图像,FPGA,等距投影
中图分类号:TP391 文献标识码:A 文章编号:1009-3044(2018)23-0222-03
1 背景
目前,普通镜头的摄像系统已经广泛应用于国防军事、医疗、安全监控、智能交通等多个领域,由于普通镜头有很大的视觉盲区,拍摄视野一般只有40°左右[1],在要求很大视场范围时不能廣泛应用。随着技术的进步以及人们对“看的更广”的要求日益提高,具有广角或鱼眼镜头摄像系统因获得的视野场景大,景深范围可从几厘米到无限远而备受市场青睐。但是大视场摄像系统采集的图像具有严重的畸变,不是人眼视觉所习惯的透视投影图像,所以必须对畸变的图像进行校正以适合人眼观看。
廖士中和高培焕等提出的多项式坐标变换算法[2]是根据鱼眼图像的像素点位置通过最小二乘发拟合误差平方最小以计算校正后图像对应点,为保证校正效果往往需要使用5阶或5阶以上的二元多项式,计算量非常巨大,不适合嵌入式系统的移植;由英向华和胡占义提出的球面透视投影约束校正算法[3]如果选取理想的采样点则效果较好,但建立目标函数时为权,精度和速度同样需要计算5阶二元多项式,且该算法所有采样点需手动选取,随机因素大,选取的结果直接关系到目标函数的拟合计算次数和图像校正的效果,不具有普遍性。摄像机标定技术是一种精确恢复的算法,但是相机标定技术针对特定的相机,且计算烦琐,复杂度很高,在嵌入式实时系统中的时间开销也很大[4]。该文采用该文使用文献[5]中的鱼眼图像校正方法,在嵌入式FPGA系统上实现鱼眼图像的实时校正。此算法原理比较简单,校正效果较好且运算速度较快,能够对采集到的鱼眼图像进行实时校正,满足实时性的要求。
2 球面等距投影校正及展开模型
图像校正的目的是将存在畸变的图像,转化为可以直接处理的线性透视投影图像以符合人眼视觉正常观察需要。该文是基于文献[5]中的球面等距投影校正及展开模型对广角或鱼眼图像进行校正,具体算法如下。
2.1 有效区域提取
广角或鱼眼镜头所采集的图像有效区含有全部景物信息,而无效区域灰度值较小,所以阈值分割,将图像二值化可以提取有效区域。但在阈值的选择上,因图像内容丰富多变,传统的选择一个固定的阈值不具普适性。因此该文讲根据图像自身的特性,先计算出该图像的平均阈值,然后在进行有效区域提取,具体算法如下。
step1将采集的鱼眼图像二值化后,计算出平均阈值T。
step2确定上水平切线。方法如下step3-step5.
step3将二值化后的图像从上到下按水平方向扫描,如果像素点(i,j)值小于T,则继续扫描。
step4如果像素点(i,j)的值大于或等于阈值T,则判断以改点为中心的3×3领域内其它像素点的值是否存在全为零的情况。
step5如果存在,则改点为干扰点,故继续扫描;否则y=j为图像的水平切线。
step6确定图像的下水平切线,将二值化后的图像从上到下按水平方向扫描,如果像素点(i,j)值小于T,则继续扫描,重复step4-step5得到下水平切线。
step7同理,将二值化后的图像从左到右按垂直方向扫描得到左垂直切线;从右至左按垂直方向扫描得到右垂直切线。
2.2 像平面-球面映射模型
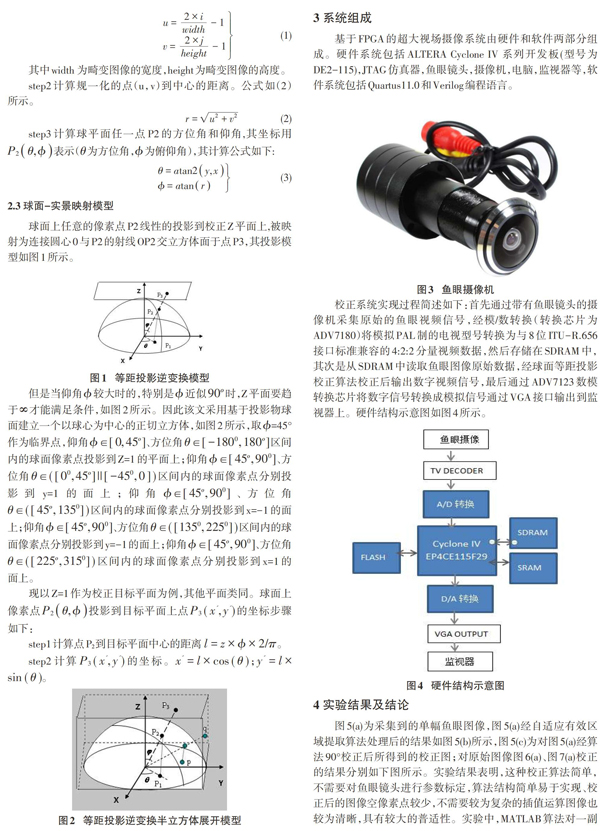
3 系统组成
基于FPGA的超大视场摄像系统由硬件和软件两部分组成。硬件系统包括ALTERA Cyclone IV 系列开发板(型号为DE2-115),JTAG仿真器,鱼眼镜头,摄像机,电脑,监视器等,软件系统包括Quartus11.0和Verilog编程语言。
校正系统实现过程简述如下:首先通过带有鱼眼镜头的摄像机采集原始的鱼眼视频信号,经模/数转换(转换芯片为ADV7180)将模拟PAL制的电视型号转换为与8位ITU-R.656接口标准兼容的4:2:2分量视频数据,然后存储在SDRAM中,其次是从SDRAM中读取鱼眼图像原始数据,经球面等距投影校正算法校正后输出数字视频信号,最后通过ADV7123数模转换芯片将数字信号转换成模拟信号通过VGA接口输出到监视器上。硬件结构示意图如图4所示。
4 实验结果及结论
图5(a)为采集到的单幅鱼眼图像,图5(a)经自适应有效区域提取算法处理后的结果如图5(b)所示,图5(c)为对图5(a)经算法90°校正后所得到的校正图;对原始图像图6(a)、图7(a)校正的结果分别如下图所示。实验结果表明,这种校正算法简单,不需要对鱼眼镜头进行参数标定,算法结构简单易于实现、校正后的图像空像素点较少,不需要较为复杂的插值运算图像也较为清晰,具有较大的普适性。实验中,MATLAB算法对一副静态鱼眼图像校正所需要的时间为6.6秒左右,而使用FPGA嵌入式系统,校正一副图像所需要的时间为2~2.4秒,最后通过鱼眼摄像机采集的图像,经过FPGA系统实时处理能达到25帧每秒。满足实时性的要求。
参考文献:
[1] 汤旭涛. 广角摄像头视频图像实时校正系统设计[D]. 上海: 华东师范大学, 2009.
[2] 廖士中, 高培焕, 苏艺, 等. 一种光学镜头摄像机图象几何畸变的修正方法[J]. 中国图象图形学报,2000, 5(7): 593-596.
[3] 英向华, 胡占义. 一种基于球面透视投影约束的鱼眼镜头校正方法[J]. 计算机学报, 2003, 26(12): 1702-1708.
[4] 张宝峰, 马志军, 朱均超, 等. 基于DSP 的鱼眼图像实时校正系统的实现[J]. 激光与红外, 2015, 45(2): 181-184.
[5] 舒旭. 一种简单而精确的鱼眼图像校正算法研究[J]. 计算机时代, 2017(6): 51-54.
【通联编辑:谢媛媛】
- 电气自动化在工业机械控制中的应用研究
- 热辊压片对电池性能的影响
- 消费者维权避免按闹分配的制度体系建设
- 房地产开发项目的全过程成本控制分析
- 从政治支持到政治控制:信访制度的变迁逻辑
- 哈尔滨原外国领事馆历史发展沿革考
- 高校图书馆网络采访工作的新认知
- 浅析水文水资源管理应用现状和加强策略
- 钻井工程存在问题与提升钻井施工效率对策分析
- 石灰石-石膏湿法脱硫效率低的原因分析及预防措施
- 浅谈社区医院后勤信息化
- 智慧城市建设的理论思考与战略选择
- 安全监督在电力企业的保障作用分析
- 油田采出污水回注处理工艺技术分析
- 浅析应急状态下新媒体宣传策略
- 浅谈企业创新与信息化
- 汽水管道振动的原因与预防
- 做好供电企业党建和精神文明建设工作的途径
- 新中国成立前中国共产党领导农村土地革命的政策变迁
- 课程思政化的创新学习
- 四川丘陵地区小康社会建设探讨
- 图书馆加强阅读推广的策略探讨
- 试论环保技术在船舶涂装中的运用
- 企业年金在民办院校教职工养老保障体系中的实施路径探讨
- 对当前企业环保管理的现状及优化路径的探析
- unstrangenesses
- unstranger
- unstrangest
- unstrangled
- unstrategic
- unstrategical
- unstrategically
- unstraying
- unstreaked
- unstreamlined
- unstrengthened
- unstrengthening
- unstrenuous
- unstrenuously
- unstrenuousness
- unstrenuousnesses
- unstretch
- unstretched
- unstrewed
- unstrewn
- unstricken
- unstrict
- unstricter
- unstrictest
- unstrictly
- 棋子
- 棋子下定后收起重下
- 棋家
- 棋局
- 棋局中救不活的棋子
- 棋局既开,终有了时
- 棋局,棋盘
- 棋峙
- 棋工
- 棋差一着便为输
- 棋布
- 棋布星列
- 棋布星峙
- 棋布星罗
- 棋布星陈
- 棋布错峙
- 棋师
- 棋战
- 棋手
- 棋无一著错
- 棋星
- 棋枰
- 棋格
- 棋流
- 棋王