严敏
摘要:该课题的研究背景是货车在ETC通道处的三维尺寸(长、宽、高)检测,期望通过计算机视觉技术,以二维图像获得实际场景的深度信息,实现货车的三维重建。其中立体匹配算法一直是立体视觉技术研究的基础、核心和难点。该文以SIFT算法为研究对象,首先简单介绍了SIFT算法;然后提出了一种基于SIFT的区域增长算法;最后对改进算法进行了仿真实验。
关键词:ETC超限检测;计算机视觉;SIFT;区域增长
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2018)08-0178-02
1引言
由于经济的快速发展和激烈的同行竞争,出现了许多为了赚取更多的利益而私自改装的货车,这些货车通过改装可达到运输更多货物的目的,超限问题层出不穷,致使超限引发的事故频发,因此迫切需要一种高效高精度的超限检测手段。
本课题以此为背景,将计算机视觉技术应用于检测中。高效的特征检测和可靠的特征匹配是计算机视觉的两个基本要素,许多文献中研究了特征检测的方法。除了经典的Moravec检测、Harris角点检测,近年来还提出了尺度不变特征变换(SIFT),速度导出问题特征(SURF),二进制鲁棒独立初等特征(BRIEF)等方法。其中SIFT算法对于尺度变换、旋转变换以及光照变化都有较好的抵抗能力,极大程度克服了环境因素带来的影响,被认为是最常用、最稳健的方法之一,因此,SIFT算法被广泛应用于移动车辆的即时定位与地图构建(SLAM)、全景图像拼接、立体视觉等方面。
SIFT算法虽然具有很多优点,但是其程序复杂,运行所耗费的时间较多,且由于它是一种基于特征的匹配算法,得到的匹配点对数量较少,无法满足课题需求。因此本文提出一种基于SIFT的区域增长改进算法,该算法可产生较多的匹配点,以生成较为稠密的视差图,便于今后的三维重建工作。
2基于SIFT的区域增长算法
尺度不变特征转换(Scale-invariant feature transform或SIFT)是一种电脑视觉的算法,用来侦测与描述影像中的局部性特征,它在空间尺度中寻找极值点,并提取出其位置、尺度、旋转不变量,算法可细化为四个部分:尺度空间极值检测、精确关键点定位、关键点的主方向分配和关键点描述。传统SIFT算法存在特征点较少的问题,为了得到较多的匹配点对,本文在SIFT算法的基础上,提出了一种基于SIFT的区域增长算法,以由SIFT算法得到的较为精确的关键点作为种子点进行区域增长,使匹配点尽可能覆盖整个图像。
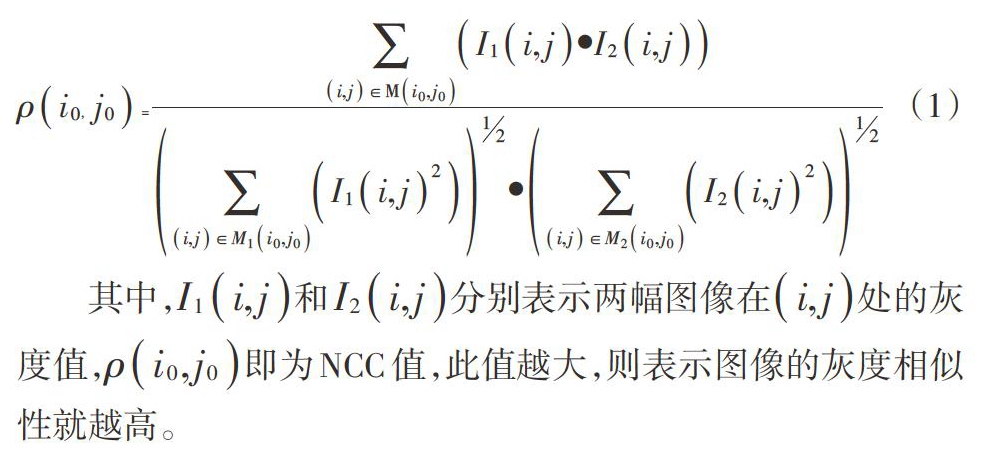
为了提高匹配的精度,首先需要对图像对进行预处理,增强细节特征。运用SIFT算法对图像对进行初始匹配,得到少量较高精度的初始匹配点设为种子点,对于某个种子点邻域内的点,在另一幅图对应的匹配点邻域内进行搜寻,确认两者匹配关系的判断依据是灰度相似性,使用归一化相关系数NCC来比较灰度相似性,该系数具有较强的稳定性,不容易受到图像像素灰度值的线性变化的影响。NCC是在某一区域内进行定义的,这个区域把它称之为模板窗口M,我们把像素(io,jo)处的NCC定义为:
具体实现如下:
(1)定义两个数据结构M、N,由SIFT算法得到的初始匹配点存放于M中;
(2)对M中的匹配点进行精度计算,将精度低于某阈值(0.8)的匹配点舍弃,剩余匹配点根据NCC值进行排序并按顺序存入N中,得到初始种子点库;
(3)按精度取出N中种子点,在原始图像和目标图像中确定种子点领域A,a;
(4)对领域A内某点,若存在于M,则跳过;若不存在与M,判断其NCC值:若小于某阈值(0.5),则丢弃;若NCC值在设定阈值之间,则存入M;若NCC值大于某阈值(0.8),则存入N。
(5)判断N内种子点数,若不为0,则继续进行步骤3~5;若为0,跳出循环。
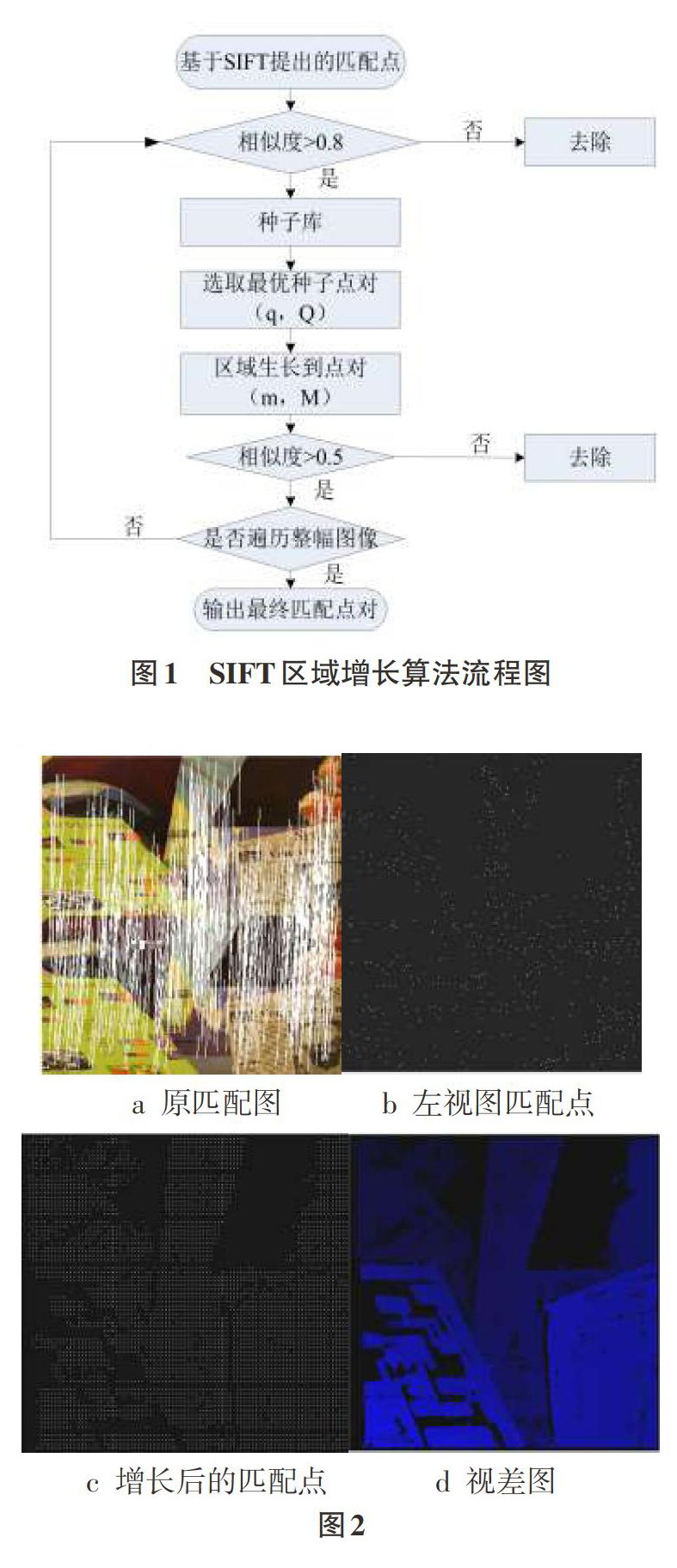
最终M中存储的就是得到的所有匹配点,算法流程图如下示。
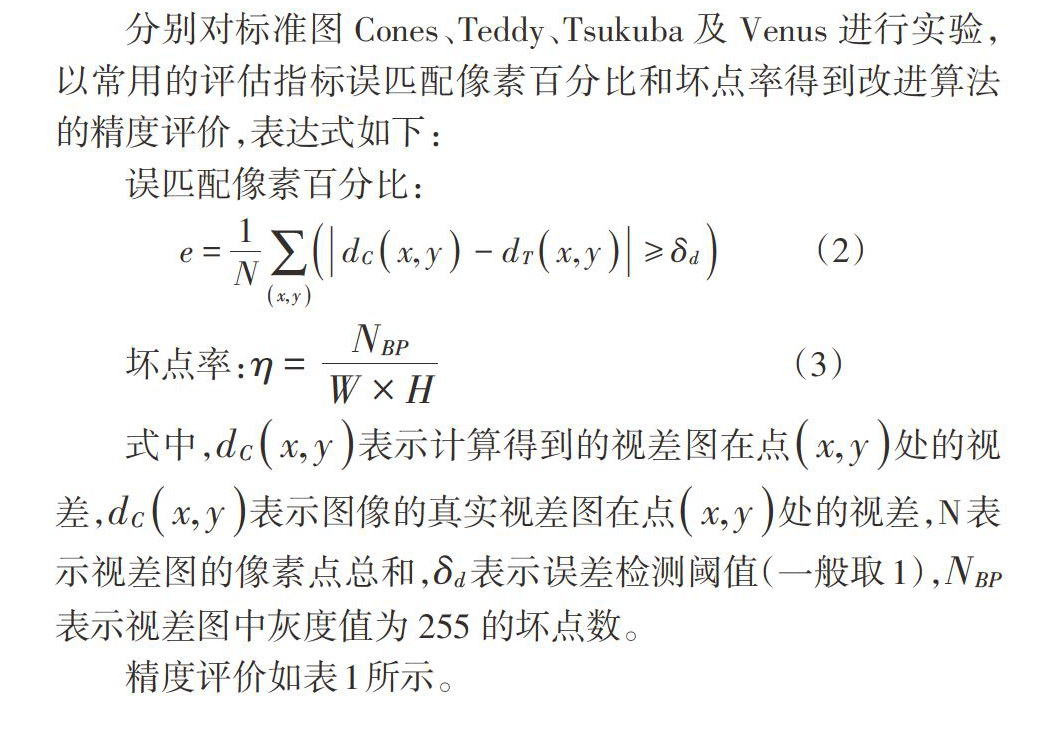
3实验仿真
以Venus标准图为例,通过SIFT算法提取得到的匹配点,把它们作为种子点进行区域增长,这样就可以从左右视图上得到更多的且较为准确的匹配点对,根据两幅图所得到的对应的匹配点,就可以计算出视差图。
可以看出,改进的SIFT区域增长算法的精度基本上是可以得到保证的,但纹理复杂,细节变换较多的地方,由于提取的匹配点比较多,误匹配率会增大。考虑到改进算法是应用于货车超限检测的,货车本身存在纹理复杂的区域较少,所以改进算法满足本课题的研究需求。
4總结
课题在研究传统SIFT算法的基础上,针对传统算法提取匹配点较少的问题,提出了基于SIFT的区域增长算法,以SIFT算法提取的匹配点作为种子点进行区域增长,由于种子点的精度较高且具有良好的抵抗外界干扰的能力,所以使进行增长后得到的最终匹配点精度得到了保证,可以形成效果良好的视差图,有利于之后的货车三维重建。然而传统算法和改进算法都存在运算复杂的问题,难以满足课题实时性的需求,需要进行进一步研究。
- 新医改药品政策下某院中药使用情况分析
- 多部门协作干预剖宫产术预防使用抗茵药物成效分析
- 临床药师参与脑梗死患者治疗的预后影响分析
- 中山市第三人民医院2018年门诊第二类精神药品使用趋势分析
- 大血管狭窄致多发脑梗死临床分析
- 慢性肾脏病合并冠心病房颤应用达比加群酯导致血尿分析
- 四君子汤联合FOLFOX-7方案对直肠癌的治疗效果分析
- 琥珀香附宽心汤联合盐酸帕罗西汀治疗肝郁气滞型广泛性焦虑症的疗效研究
- 探讨中西医结合治疗小儿支气管肺炎的疗效
- 中风病肩手综合征临床治疗研究
- 化痰丸治疗痰热壅肺型支气管扩张症的临床观察
- 普拉克索片联合美多芭治疗帕金森病的临床价值分析
- 阿戈美拉汀与度洛西汀在首发抑郁症患者中的疗效对比研究
- 重组人血小板生成素治疗难治性原发免疫性血小板减少症的临床研究
- 双氯芬酸钠联合玻璃酸钠治疗干眼症的疗效探究
- 重症急性胰腺炎治疗中乌司他丁与奥曲肽的应用对比
- 地塞米松治疗重症胰腺炎的效果分析
- 高剂量放疗联合化疗治疗进展期无法行根治性手术的直肠癌患者的疗效分析
- 不同拉唑类三联疗法对2型糖尿病伴幽门螺杆菌阳性患者的疗效分析
- 阿奇霉素序贯疗法治疗小儿肺炎支原体肺炎的效果分析
- 气管插管滴入猪肺磷脂后联合高流量氧疗与无创辅助通气治疗新生儿呼吸窘迫综合征的效果分析
- 氨茶碱联合小剂量肾上腺素在急诊抢救重症哮喘中的疗效观察
- 重组人尿激酶原联合替罗非班在高血栓负荷急性STEMI患者PCI中的应用体会及效果
- 左西孟旦联合米力农治疗老年难治性心力衰竭的临床疗效研究
- 七氟醚吸入麻醉对急性颅内出血开颅手术患者的脑保护作用研究
- foaminess
- foaminesses
- foaming
- foamingly
- foamless
- foamlike
- foam rubber
- foams
- foamy
- foam²
- foam¹
- fob
- fobbed
- fobbing
- fobs'
- fobs
- fob sb off with
- fob sb off (with sth)
- focal
- focal-distance
- focal distances
- focalization, focalisation
- focal length
- focal lengths
- focally
- 酒柬
- 酒桌上的小盘子——喋喋(碟碟)不休
- 酒桌上的话——不算数
- 酒桶
- 酒梢子
- 酒楼
- 酒楼、茶楼等特设的小房间
- 酒楼、餐馆、茶肆等的服务人员
- 酒楼或饮料店的顾客
- 酒榨
- 酒榷
- 酒槽
- 酒次
- 酒次青衣
- 酒欺花恼
- 酒正
- 酒殢花迷
- 酒母
- 酒毒
- 酒民
- 酒气
- 酒气熏天
- 酒水
- 酒水如泉
- 酒池