唐飞龙 张娜 黎安庆
摘要:为了提高轮式移动机器人运动的速度、加速度和作业效率,本文以STM32位控制核心开发全轮转向四轮移动机器人,完成了移动机器人三维模型的构建、控制系统软件硬件的设计以及调试和实验等工作,结果表明该机器人运行可靠、运行和作业效率高。
关键词:轮式移动机器人;STM32控制系统;CAN总线;激光雷达;全轮转向
中图分类号:TP242 文献标识码:A
文章编号:1009-3044(2020)25-0047-03
Abstract: In order to improve the speed, acceleration and operating efficiency of the wheeled mobile robot, this article used the STM32control system to develop an all-wheel steering four-wheel mobile robot,Had completed the construction of the three-dimensional model of the mobile robot, the design of the control system software and hardware, as well as debugging and experimentation.the results showed that the robot is reliable, efficient and efficient.
Key words:Wheeled mobile robot;STM32 control system;CAN bus;lidar; all-wheel steering
機器人最早出现在《罗萨姆的万能机器人》的剧本中robot捷克语意为奴隶[1],机器人从一开始就被寄予代替人类劳动的使命,随着机械学、计算机技术、电子、传感器、控制技术、人工智能、仿生学等技术的发展,各种机器人已经开始解放人类劳动力,轮式移动机器人作为机器人的重要组成元素,近几年来也得到了长足的发展。本文以STM32位控制核心开发全轮转向的四轮移动机器人,完成了移动机器人三维模型的构建、控制系统软件硬件的设计以及调试和实验等工作。
1移动机器人结构设计
常见的移动机器人是三轮或者四轮的全向轮机器人[2-4],本文自主研制的对象是全轮转向的四轮移动机器人,它由四个驱转一体轮组成,可以完成四轮独立驱动和四轮独立转向,该四轮全转向移动机器人在结构上可分为机械爪、运动底盘和机架等三个主要部分组成。
1.1 机器人的机械爪
全轮转向的四轮移动机器人的机械爪主体由亚克力板经过雕刻机雕刻成薄片近似半圆弧状,弧上均布小孔,形成机械爪齿,用碳钎杆通过小孔将若干机械爪齿固定起来形成机械爪左右两部分。机械手采用总线舵机控制,机械手将地面物体夹持后由电机通过齿轮齿条传动拖动机械手向上移动,然后将物品存储在机架上。
1.2 机器人的底盘
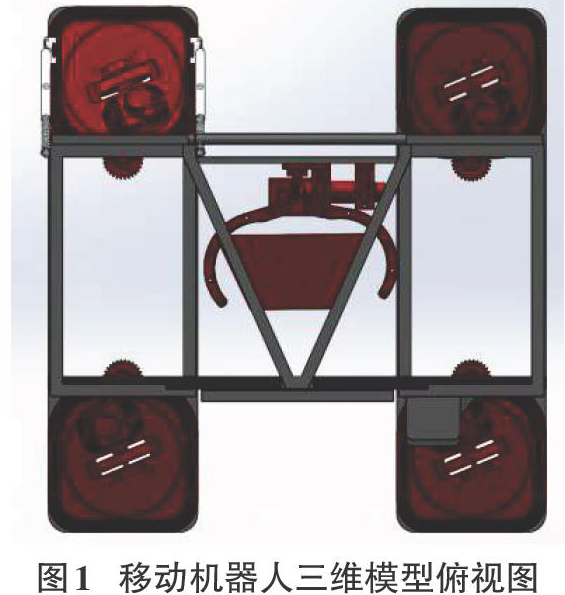
全轮转向的四轮移动机器人需要合适的运动机构,使机器人能够在工作环境中按照设计预期运动,本文采用了全轮转向的四轮底盘结构,底盘形状采用正方形设计如图1所示。
全轮转向的四轮移动机器人采用四个轮子独立驱动和独立转向,并配有两个铰接式的悬挂装置,使得机器人在不平整地面也能够保证四轮有效地与地面接触,构成四轮全转向的底盘结构形式。每个轮都能单独控制速度和转向,可以保证移动机器人转向时满足阿克曼转向原理,使得转向时移动机器人轮子与地面纯滚动、无侧滑,运动过程中有足够的灵活度,控制简单运动精度高,实现机器人可以以任意姿态向任意点做直线或曲线移动。
1.3 机器人的机架
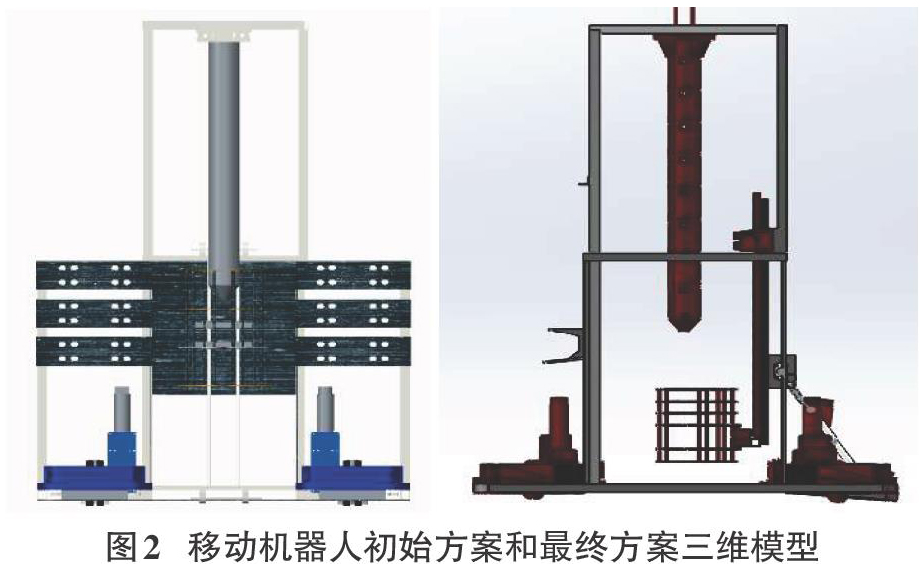
全轮转向的四轮移动机器人的机架为铝矩管通过焊接形成三层结构,四个驱转一体轮安装在机架第一层平台上,机械爪的提升电机安装在第二层平台上,最初方案为在一层和二层平台之间固定两根光轴导轨,机械爪和控制机械爪的舵机固定在滑块上,滑块通过直线轴承连接在两根光轴导轨上,升降电机通过同步带拉动滑块在光轴导轨上滑动,其结构如图2中左所示。此方案能够满足设计要求,但是每次在地面固定桩上放置标记物后机器人需要倒退,效率较低。最终方案为在二层上固定升降电机和HGH型直线导轨的滑块部分,将齿条固定HGH型直线导轨上,升降电机驱动齿轮与齿条啮合,拉动直线导轨上下运动,机械爪和驱动舵机固定在直线导轨的底端,此方案机器人中间形成了拱形空间,可以在放置好标记物后继续前进,提高了移动机器人的作业效率,其结构如图2中右所示。储物架固定在机架第三层上,用于储存机械爪抓取的标记物,储物架上有7个舵机,最多可以储存7个标记物。
2硬件设计
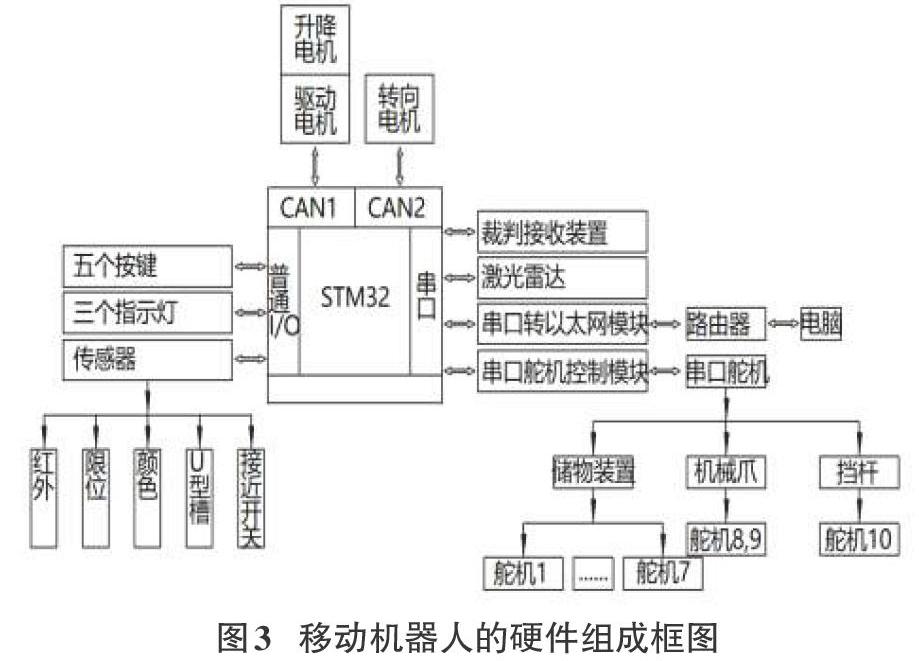
全轮转向的四轮移动机器人采用意大利意法半导体 (STMicroelectronics)公司的STM32F407ZGT6作为核心运动控制器,该芯片具有功耗小和运算速度比较快等优点[5, 6]。整体结构包括作为上位机的PC机和由STM32芯片作为控制核心的下位系统,由于移动机器人四轮需要相互独立控制,所以四个驱动电机、四个转向电机和一个升级电机采用基于CAN总线的多电机控制系统,该系统由上位机PC机、下位机控制器STM32、USB-CAN转换器、CAN总线收发器、电机驱动器和无刷直流电机组成。通过对每个电机设置电机ID,控制器STM32通过广播的方式发送控制信号,电机控制器可通过CAN总线收发器实现对CAN总线通信信号的接收和发送。机器人系统还包括若干串口舵机实现对标记物的操作,红外、颜色、U型槽和激光雷达等组成机器人的感知系统,保证机器人能够精确移动到预定位置,并正确识别标记物。综上,机器人的硬件组成如图3所示。
3软件系统与控制
全轮转向的四轮移动机器人的控制系统采用C语言编写程序,主要完成以下两部分功能:
(1)完成全轮转向的四轮移动机器人的运动控制功能;①转向:全轮转向四轮机器人有四个转向电机,机器人运动过程中,四个轮子可能转角相同,也可能转角不同,比如机器人需要直线行驶时,四个轮子转角相同;当需要转弯时,四个轮子转角就不相同,因此,四个转向电机每个电机均设置有电机ID,能够相互独立受主板的控制。②行驶:全轮转向四轮机器人有四个驱动电机,机器人运动过程中,直线运动时,每个轮子转速相同;转向运动时,为了保证轮子与地面纯滚动,四个轮子转速就不完全相同,因此,四个驱动电机也需要独立的电机ID,使得每个轮子转速都能够相互独立的受主板控制。机器人运动控制部分的控制结构如图4所示。
(2)完成目标物的抓取、储存和放置工作;①抓取标记物:移动机器人运动到抓取标记物的预定位置,控制器控制舵机8和9转动,两个舵机转角一致,所以可以共用同一个信号。②标记物存储:当机械爪抓取到标记物后,升降电机受主板控制将机械爪提升到预定位置,提升过程中串口舵机1~7需要完成松开和顶紧两个动作,最终将标记物固定在储物装置上。③标记物放置:移动机器人运动到放置标记物的预定位置,控制串口舵机1~7从下至上依次松开就可以完成标记物放置,每个舵机独立受控制。
4调试
四轮移动机器人设计和装配完成后,实物如图5所示,左图是机器人整体外观图,右图是PCB电路板,然后进行了硬件调试,硬件调试先后经过了检查电路、通电观察、静态调试、动态调试和指标测试。硬件检测合格后进行机器人参数调整,包括机器人的机械爪、档杆、驱动电机和转向电机的控制参数等。
5结论
本文设计了并搭建了全轮转向的四轮移动机器人,主要包括机械爪、全轮转向四轮底盘和三层机架,该机器人主控制芯片为STM32F407ZGT6,控制系统包括四轮驱动独立转向和独立电动轮驱动控制、机械爪控制、标记物存储和放置控制,经过调试和实验,传感器模块性能良好,稳定可靠,激光雷达能够准确地发现标记物,颜色传感器能够正确识别标记物,直流电机驱动模块产生的扭矩能够驱动机器人移动,机器人移动速度快加速度大,运行和作业效率高,在四川省机器人大赛上获得一等奖。但是机器人存在速度控制不够理想,系统潜力开发不充分等问题,需要进一步研究。
参考文献:
[1] 王握文. 世界机器人发展历程[J]. 国防科技,2001(1): 70-75.
[2] 王一治,常德功.Mecanum四轮全方位系统的运动性能分析及结构形式优选[J].机械工程学报,2009,45(5):307-310,316.
[3] 王兴松. Mecanum轮全方位移动机器人技术及其应用[J]. 机械制造与自动化,2014,43(3): 1-6.
[4] 王寧. 基于STM32的自动巡检机器人[J]. 南方农机,2019, 50(11): 20-21.
[5] 喻金钱,喻斌. STM32F系列ARM Cortex-M3核微控制器开发与应用[M]. 北京: 清华大学出版社, 2007.
[6] 刘同法,肖志刚,彭继卫.ARM Cortex-M3内核微控制器快速入门与应用[M].北京:北京航空航天大学出版社,2009.
【通联编辑:梁书】
- 真帮实扶解忧难
- 利率市场化视角下金融市场间溢出效应检验
- 农业供给侧结构性改革背景下农村信用社转型发展思考
- 试论财政国库集中支付下预算调控的实施
- 第三方支付机构洗钱风险探析
- 金融大数据研究与应用进展综述
- 绿色信贷风险管理的调查与思考
- 小微企业融资担保服务的先行示范作用研究
- 新形势下商业银行拓展对公存款业务的思考和建议
- 银行系投行服务中国(云南)自贸区路径研究
- 银行扶贫贷款风险防控研究
- 中央银行会计核算数据集中系统(ACS)运行中存在的问题及建议
- 关于企业利用谨慎性会计原则规避外汇监管问题的思考
- 5G智能银行网点研究
- 大数据背景下社会资本参与绿色农业供应链的融资机制研究
- 盈余管理计量模型创立及演变综述
- 土地利用条件改变补地价评估的思考
- 战略管理会计在商业银行的应用
- 中国经济迅速发展中的宏观经济政策研究
- 我国商业银行信贷资产证券化的动因分析
- 购进旅客运输服务进项税额抵扣的财税处理
- 非齐次隐马尔可夫模型及其参数估计
- 自由现金流贴现模型在收购中的应用
- 石林县电子商务发展调研与建议
- 商业银行会计内部控制及风险防范探讨
- uncontributing
- uncontributive
- uncontributively
- uncontributiveness
- uncontributivenesses
- uncontributory
- uncontrite
- uncontriving
- uncontrollabilities
- uncontrollability
- uncontrollable
- uncontrollableness
- uncontrollables
- uncontrollably
- uncontrolling
- uncontroversially
- unconvenable
- unconvened
- unconvenient
- unconvening
- unconvention
- unconventional
- unconventionalism
- unconventionalist
- unconventionalists
- 莱菔
- 莱菔萝卜
- 莱蒙托夫
- 莱蒙特
- 莱衣
- 莱衣起舞来衣同戏
- 莱辛
- 莲
- 莲乡
- 莲像
- 莲华世界
- 莲华出水
- 莲华步步
- 莲台
- 莲叶
- 莲叶儿
- 莲叶羹
- 莲塘
- 莲子
- 莲子好吃苦在心
- 莲子心中苦,梨儿腹内酸
- 莲孩
- 莲宇
- 莲宇莲境
- 莲宗