江志伟 李胜刚 蒋胤冰

摘要:随着工业机器人向更深、更远、更广、方向发展以及机器人智能化水平的提高,机器人的应用范围还在不断地扩大,机器人正在为人类生活质量发挥着重要的作用。现实生活中常见的机器人一般为轮式和履带式机器人,通过轮和履带来实现行走,遇到复杂地形则难以实现正常行走,在某些方面已经很难达到人们期望的要求,基于此背景下,为了提高机器人的环境适应能力,本课题开发的多足机器人协调控制系统,以适应不同环境,从而提高工作效率。
关键词:MQTT;HTTP;多足控制;物联网
中图分类号: TP311? ? ? 文獻标识码:A
文章编号:1009-3044(2020)32-0192-03
近年来,由于人工智能的爆发式发展,众多的智能仿生机器人争先亮相。但是在机器人研究领域中,传统的移动机器人依然占有十分重要的地位。本课题设计的是一套多足机器人控制系统,该系统是基于机器人硬件结构上的软件模式创新,即自主开发的一套六足机器人控制系统,包括硬件,Android终端,和服务器后端,该系统经个人测试已经成功运行。本项目是基于硬件结构上进行优化其软件系统结构。创意点在于控制模式的多样性,构建其与其他机器人的协同控制系统。
1 国内外研究现状
1.1 国内现状
广州大学华软软件学院电子系何等人开发了一套六足消防机器人,其团队采用s5p6818为主控制核心,,STM32为检测系统,利用Android平台,通过WIFI摄像头以及传感器对火灾现场环境信息实时采集、存储,完成手机终端与机器人的实时通讯,最终实现远程监控和机器人的直线路径、转弯步态的规划和控制等功能。
长沙环境保护职业技术学院继续教育部杨等人,设计了一套采摘机器人的远程操作系统。借助大数据Hadoop技术原理以及架构的研究,实现了机器人的定位导航算法,同时完成了硬件以及软件的设计,符合设计需求,对采摘机器人的远程控制具有一定的积极意义。
1.2 国外现状
日本的某位教授首先提出蛇形机器人理念,并在20世纪 70 年代研制出了第一个蛇形机器人,较为典型的有日本的 Snakebot 机器人,能够深入到灾难后废墟的每个小角落,Sherbrook 大学研制的 AZIMUT 机器人,其主要特点是根据环境与任务的不同随机改变自身形态。近日,意大利的Pembangunan Jay开发了一种低成本WiFi助教机器人。该机器人是一种三轮机器人搭载机械手,在机械手中使用WiFi模块与智能手机相配对,通过互联网连接Blynk IoT平台,实现远程操作,是一种用于教育辅助工具的WiFi多足型机器人。
2 整体结构
本项目采用的整体结构是六足机器人与机械手相结合。对比轮式机器人以及单足机器人,六足机器人有着更加卓越的应对复杂地形的能力。并且在六足的基础之上,搭载了六个自由度的机械手。现在市面上的机械手80%为工业机械手,其体型巨大,不能移动,功能单一,而本项目的创意增加了机械手的灵活性,可实现抓取的动作,亦增加了六足机器人的功能性。机械手可替换成其他功能的器件,适应不同的场景和需求。同时整体结构可与其他机器人构建协同工作系统。硬件端为机器人(群)系统,借助WiFi模块,使用MQTT协议上传数据至服务器端,并由服务器转发至客户端。
3 硬件系统设计
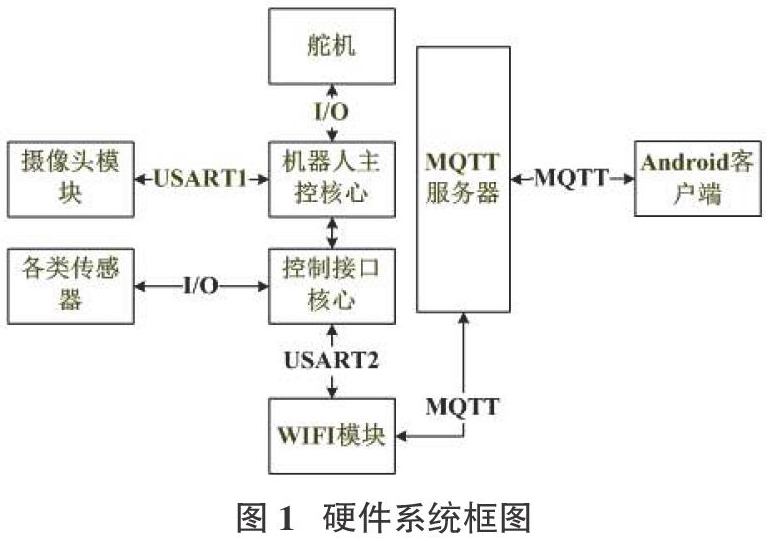
硬件系统为机器人控制核心,控制舵机(动作)以及摄像头(视觉),并预留动作接口,与通信核心板进行数据交互。通信核心处理各类传感器信息并驱动WiFi模块与服务器进行通信,进而转发数据至客户端。同时接收远端发出的动作指令,并通过串口驱动机器人控制核心,执行动作。硬件框图如图1所示。
4 软件系统设计
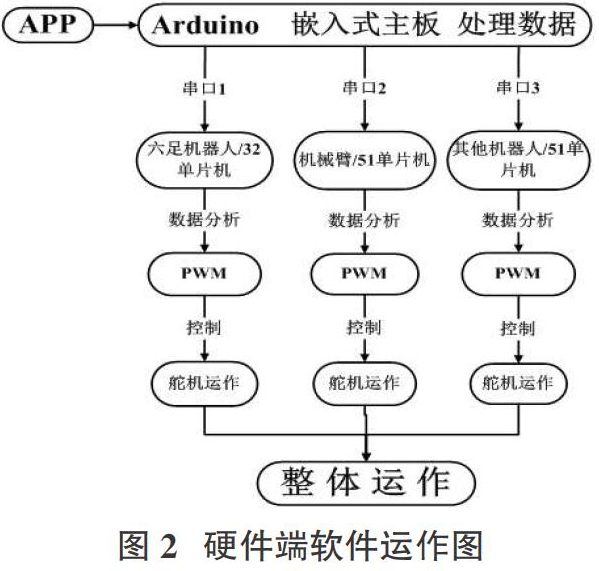
软件系统均为自主开发。Android APP使用Android? Studio安卓编程软件,开发与机器人配套的APP硬件端软件流程图如图2所示,单片机编程:机械手与移动底盘六足式机器人底层代码都采用Keil编写,用于控制机械手多个舵机的转动。
同时搭载WiFi模块和温湿度等传感器,编程使其与手机App联机实现系统的运作控制。同时,每个机器人单独开发,通过自定义的指令协议,使用串口通信实现对六足和机械手软件系统合并与协作运行。
上位机软件采用Java语言编写,机械手和移动底盘六足式机器人分别与PC机通过有线相连接,通过串口通信,可对机器人动作组添加、调试,以适应不同地形。
5 特色亮点
5.1 硬件设备创意
本项目创新性地将机械手的运行方式,从传统的调整舵机角度控制调整为三维坐标控制,不仅运行动作简单干练,还大幅度地降低了对于传统方式的计算精力,减少了计算与试验时间,可由手机等移动设备操纵,更为实验演示所需要的高效率提供了重要的基础。六足机器人可拆装成为四足等机器人,其上的机械手可替换成喷射水或粉末的装置,或是加上摄像头等传感装置。
5.2 控制模式创新
多个机器人可通过组网实现多种控制模式。根据实际需求,选择相适应的控制模式。控制模式整体框图如图3所示。
一对多控制模式,适用于需要多个机器人协同工作情景,本模式中,各个机器人将自动接入控制端,实现多用户交互;单机器人控制模式,控制端主动连接搭载在机器人上的WiFi,相比较于多链接模式接入更迅速;远程模式,使用云服务器,通过MQTT或HTTP协议,手机App对机器人远距离控制,亦可进行异地操作,实现控制距离最大化;自动避障模式,六足机器人上搭载的超声波测距模块,可实现机器人自动避障模式。连接控制模式上的多样性。使用无线WiFi控制和自主开发的手机App与机器人进行交互。通过软件编程,摒弃传统的PS手柄和有线控制模式。
模式一:多链接模式。本项目使用了2个机器人进行系统测试,双足机器人作为六足式机械手机器人的辅助,进行系统测试。优点:多用户交互,可在同一运行下同时控制多个机器人共同运作;如图4所示。
模式二:单连接模式。通过连接了搭载在机器人上的WiFi,可迅速接入。优点:操作便利方便,且启动迅捷;如图5所示。
模式三:远程控制。使用阿里云,在阿里云中搭建MQTT服务器,机器人接入后可通过手机App进行远程控制。优点:实现控制距离的最大化;如图6所示。
模式四:自动模式。搭载一个超声波测距传感器,简单地实现超声波直线方向避障。在App中集成自动控制指令,用户即可脱离手动,使机器人进入自动避障模式。优点:自动模式,智能化。
本项目的设计在系统操作上简单易于上手,支持电脑端控制和手机App控制的控制方式,并且在给定特定指令接口的情况下,用户可根据需要自行扩展控制方式,适合各年龄阶段的人使用。
6 总结
6.1 技术成果
本课题在各类大赛(如参加物联网类、机器人类)中多次获奖,并根据专家们的指导进行了完善和进一步的开发。
6.2 改进计划
在后期的优化中,机械手六足式机器人可作为在小型灾后救援机器人,方便进入救援人员难以进入的地方,进行勘探取样,改进后亦可以用于运输物资。另一方面,若在视觉方面集中研究,使机器人具有通过视觉图像识别物体的能力,可实现通过辨别,在众多物体中抓取想要的物体,则会有更加广阔的应用前景。
同时,从研究的角度看,多机器人协调研究比单机器人增加了许多新问题,主要有:1)复杂协调任务的描述;2)同一工作空间中多机器人协调和集中;3)多机器人协调系统的自适应控制;4)多机器人协调系统的负载分配;5)以多传感器为基础的数据检测和障碍描述;6)多机器人协调系统的建模和控制结构的模式;7)多机器人坐标间的标定;8)AI技术和控制系统与多机器人协调系统的结合。为完成同一任务,多个机器人协作应具有灵活性、低代价和高性能的优点。就上述问题所而言,本项目控制机器人的协调工作系统还可在此基础上完善和再次开发。
参考文献:
[1] 张毅,罗元,郑太雄,等.移动机器人技术及其应用[M].北京:电子工业出版社,2007.
[2] 顾新兴孙燕朴冯纯伯.多机器人协调系统研究综述[J].系统工程与电子技术,1994,16(12):9-20.
[3] 郭继峰,王平,崔乃刚.空间在轨装配任务规划[M].北京:國防工业出版社,2014.
[4] 高志军,颜国正,丁国清,等.多机器人协调与合作系统的研究现状和发展[J].光学精密工程,2001,9(2):99-103.
[5] 何苏利,李根,董立国.基于无线控制的六足机器人的设计与实现[J].智库时代,2019(34):275-276.
[6] 杨英华.基于大数据和WiFi的采摘机器人远程操作系统研究[J].农机化研究,2020,42(2):220-224.
[7] Uddin N.A development of low cost wi-fi robot for teaching aid[J].Jurnal Infotel,2020,12(2):60-66.
【通联编辑:唐一东】
- 马克思的择业观对当代大学生择业的启示
- 甘肃省农牧企业循环产业经营模式探析
- 加快陕西猕猴桃产业发展的路径分析
- 农村老年人文化活动参与的困境及对策探究
- 中西部地区基层文化志愿服务存在问题及对策探析
- 弘扬传统文化 打造人文陇州
- 贵州毕节市非物质文化遗产保护现状及对策
- 新时代陕西省民办高等教育改革路径分析
- 基于同伴教育的大学生青春健康调查
- 江西省自驾游游客社会属性及行为特征分析
- 浙江省高等教育国际化的现状、特点与对策研究
- “一带一路”倡议背景下中国企业投资印度的机遇与挑战
- 技工院校干部人事档案管理存在的问题及对策
- 新形势下强化高职院校财务管理的对策
- 高职院校构建教学名师队伍建设机制研究
- 学生食堂就餐的影响因素调查分析
- 斯里兰卡留学生汉语口语学习焦虑调查研究
- 新形势下大学生促进就业对策刍议
- 刍议依托学生社团促进大学生创新创业能力提升
- 公安院校双师型师资队伍建设路径探析
- 学前教育专业学生信息技术能力调查分析
- 地方高师院校教育实习中存在的问题与对策
- 优化医院人事档案管理 促进人才资源利用
- 微媒体时代企业青年员工思想政治教育研究
- 水文水资源管理在水利工程除险加固过程中的应用探究
- banker's reference
- bankersreference
- bankfacility
- bank faˌcility
- bank for international settlements
- bankforinternationalsettlements
- bank giro credit
- bankgirocredit
- bankguarantee
- bank guarantee
- bank holiday
- bankholiday
- bank holidays
- bankidentificationnumber
- bank identification number
- banking
- bankingaccount
- banking accounts
- banking acˌcount
- bankings
- banking system
- bankingsystem
- bankinterest
- bank interest
- bank lending
- 横结肠
- 横绝
- 横绝一世
- 横绝一时
- 横绝六合
- 横绝千古
- 横绝四海
- 横绝百世
- 横绷理
- 横罪
- 横置
- 横置之木
- 横置的匾额
- 横翔捷出
- 横翥
- 横联
- 横肆
- 横肉
- 横膈膜
- 横舍
- 横艾
- 横草
- 横草不动,竖草不拿
- 横草不卧,竖草不吃
- 横草不拈,竖草不动