赵从健 雷菊阳 李明明


摘? 要: 针对传统汽车制动系统控制过程中存在的纯滞后环节的问题,采用史密斯预估控制理论的思想,设计汽车制动控制系统中的反馈环节,消除闭环传递特征方程中的时滞因子,达到汽车快速制动的效果。该方法主要结合系统动态响应的评估结果设计补偿环节,超前地将预估的被控量补偿到控制输入端,从而消除系统时滞。通过引入模糊PID控制理论建立汽车的车辆模型,降低史密斯控制理论对精确系统模型的依赖。实验表明,引入史密斯模糊自整定PID控制后,系统的输出响应速度加快,超调量减少,振荡幅度减小,而汽车制动所需时间缩短。
关键词: 汽车制动; 史密斯预估控制; 模糊控制; PID控制
中图分类号:TP273? ? ? ? ? 文献标志码:A? ? ?文章编号:1006-8228(2019)09-16-04
Research on automobile braking system based on Smith fuzzy control
Zhao Congjian, Lei Juyang, Li Mingming
(Shanghai University of Engineering Science, College of Mechanical and Automotive Engineering, Shanghai 201620, China)
Abstract: In view of the problem that the dead time existed in the control process of traditional automobile braking system, based on the theory of Smith predictive control, the feedback link in the automobile braking control system was designed to eliminate the dead time factor in the closed-loop transfer characteristic equation and achieve the effect of rapid braking. This method mainly combined the evaluation results of system dynamic response to design the compensation link, in advance of the estimated controlled quantity compensation to the control input, so as to eliminate the system time delay. By introducing the fuzzy PID control theory to build the vehicle model, the dependence of Smith control theory on the accurate system model was reduced. The experiment showed that the output response speed, overshoot and oscillation amplitude were reduced, and the braking time was shortened.
Key words: automobile braking; Smith predictive controls; fuzzy control; PID control
0 引言
現阶段,汽车是人们出行的重要代步工具。汽车在行驶过程中,如遇到红灯或遇突发状况,需要减速或紧急刹车,如何安全、快速、舒适地达到制动效果,成为未来智能汽车研究的重点方向。
为了提高道路交通的安全性,汽车急刹车操作制动控制器设计也积累了许多的成功。PID控制是汽车制动控制器设计的常用方法[1]。该方法控制稳定性较好,制动过程中滑移率控制平顺,但是,看似简单的PID控制器,其控制过程较为繁琐,耗时较长。基于模糊控制器设计也是一个研究的热点,通过模糊方法进行控制决策,因而不需要控制对象的精确数学模型[2],该方法控制响应性较高,超调量小,较好的鲁棒性和灵活性,但存在控制器设计成本较大,对较小误差的控制方面不如PID控制,难以达到较高的控制精度的问题。
汽车制动系统是一个较为复杂的控制系统,其中有些信号的传递需要依靠一些特殊的介质作为媒介(如液压),而介质输送到执行端需要一段时间,这段时间在控制系统中被称为纯滞后环节。在汽车制动过程中,由于纯滞后环节的存在,影响了系统的稳定性和动态特性,给车辆行驶带来了很大的安全隐患。
本文利用史密斯预估控制的思想[3-5],在汽车制动控制系统中增加了反馈环节,消除闭环特征方程中的滞后环节,从而达到快速的制动效果。此汽车制动方案的研究,对减少道路交通事故、提高行车安全性都有非常重大的意义。
1 汽车系统模型
1.1 车辆模型
根据汽车动力学相关原理,在七自由度汽车力学模型上,抽离出ASR/ABR 控制系统动力学关系式,建立车辆动力学模型、轮胎模型、制动模型,并写出与之相应的参数关系[6]。
[mv′=-Ff]? ? ? ? (1)
[Jw′=Ff×R-Tb]? ? ? ? ?(2)
[Ff=Nμ]? ? (3)
[s=1-wR/v]? ? ? ? ? ? ?(4)
[μ=? ? ? ? ? ? ? ? ? ?4s,? ?s<0.20.825-0.125s,? ?s≥0.2]? ? ? ?(5)
[Mp=? ? ? ? ? ? ? ? ?0,? ? p
式中:m为汽车整车1/4的质量,kg;v为车速,m/s;R为车轮半径,m;w为轮速,rad/s:J为车轮的转动惯量,kg·m2;Tb为制动力矩,N·M;μ为地面摩擦系数;N为车轮对地面法向反力,N。
汽车的刹车过程属于一个非线性过程,对于其他的拟合或是模拟控制方式来说,模糊PID控制集合了可靠性、智能性与灵敏性于一体,可以保证在复杂道路环境中控制系统的稳定性。基于上述式子,建立车辆系统的PID控制模型:
[Gc(s)=Kp(e+1Tiedt+Tddedt)]? ? ?(7)
1.2 制动系统模型
制动系统由两个部分组成,分别是制动器和液压传动系统[7]。液压部分的模型建立较为复杂,需要借助于流体力学的相关知识,并且求出的为高阶系统,不适合控制系统的仿真计算。
由于液压系统的存在,考虑控制系统为带有迟滞环节的二阶系统。为了方便计算和仿真,现采用经验公式(8),再根据实验数据逼近和拟合系统的参数。
[Gp(s)=Ke-τs(T1s+1)(T2s+1)]? ? ? (8)
其中,τ为系统的时滞因子;K为系统的开环增益;T1、T2为系统的时间常数。
2 基于史密斯的汽车制动控制
在汽车刹车过程中,由于液压传动系统的存在,系统中存在纯时滞环节。系统接受一个输入信号后,需要一段滞后时间才能输出一个响应。纯滞后环节的存在,导致系统的稳定性较低,降低系统反馈调节的质量。
20世纪中叶,史密斯为解决系统滞后问题,提出了史密斯预估控制理论。这种理论的思想是利用反馈环节消除闭环传递函数中的时滞因子τ,将被控量超前反馈补偿到控制器的输入端,减少控制系统响应所需时间。
Gc(s)表示前向控制系统函数,Gp(s)表示被动对象不含純时滞环节的函数。引入预估补偿器:Gk(s)=Gp(s)(1-e-τs)后,新的系统传递函数为:
[YsRs=GcsGpse-τs1+GcsGps]? ? ? ⑼
和原系统相比,引入预估补偿器后,系统特征方程为D(s)=1+Gc(s)Gp(s),不包含时滞因子τ,故而消除了其对控制系统的影响,间接地减小了系统的调节时间和超调量,从而提高了系统的稳定性,实现更高精度的控制。
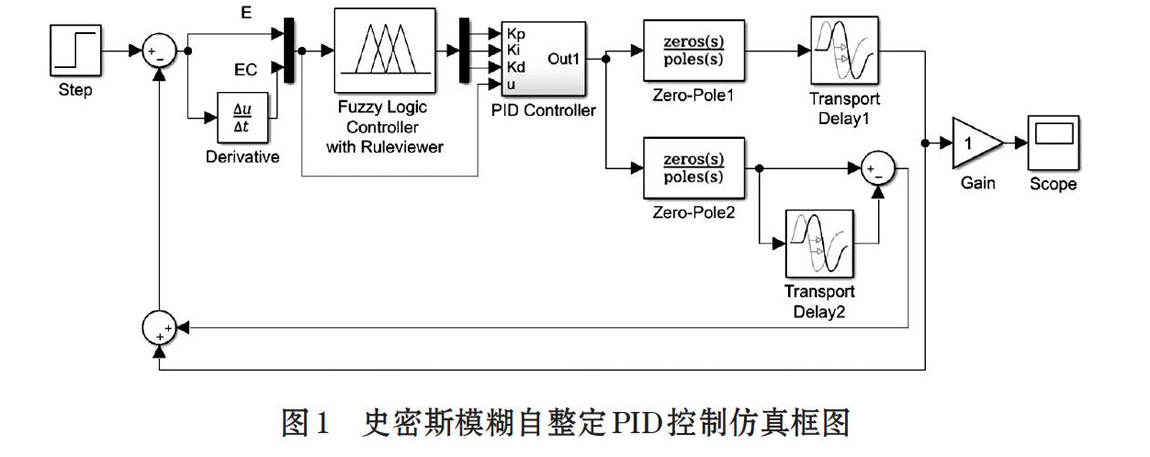
采用常规的模拟PID控制时,存在参数难以确定的情况,在此引入模糊控制器的方法,使用自整定PID模糊控制器的方法来计算模型[8-10],如图1所示。
如图1的模糊控制器中,将系统的误差E和误差变化率EC作为输入,增益变化Kp、Ki、Kd作为输出。选择E、EC的模糊子集为{ZE,PO,PS,PM,PB},其对应论域为[0,1]。选择Kp、Ki、Kd模糊子集{NB,NM,NS,ZE,PS,PM,PB},其对应的论域为[-6,6]。选择三角形的隶属度函数,绘制输入、输出变量的隶属度函数如图2。模糊自整定有几大原则:减小系统的调节时间、超调量和使系统拥有良好的稳定性能。模糊控制表如表1。
3 仿真结果分析
根据上述确定的输入、输出变量及对应的模糊控制表,进行模糊推理。同时选择加权平均判决的方法进行反模糊化,得到对应的Kp、Ki和Kd的模糊推理曲面。当E和EC已知时,可知PID控制器对应的比例系数Kp、积分系数Ki和微分系数Kd,从而完成对系统的精确控制。
针对阶跃信号输入,分别绘制常规PID控制下、模糊自整定PID(Fuzzy PID)控制下和史密斯模糊自整定PID(Smith-Fuzzy PID)控制下系统的响应曲线,如图3所示。
由图3可知,常规的PID控制系统仿真结果超调量大,振荡明显且稳态精度较低。模糊自整定PID仿真曲线比PID控制仿真曲线超调量减少,更短的时间内达到稳定状态,该系统的稳态精度、鲁棒性都有明显的提高,但依然受时滞环节的影响。而结合模糊控制和史密斯控制后,从仿真结果可以看出,系统的响应时间最短,超调量小,达到稳态时间短,设计的控制系统克服了时滞,响应速度快,稳态性能好。通过对三种控制方法的比较,使用史密斯模糊自整定的PID控制器可以有效地提升对时滞系统的控制品质,且系统的动态良好。
验证汽车在湿沥青路面的制动性能,取汽车初速度为20m/s,期望滑移率为λ0=0.15。绘制三种控制方式下汽车制动时汽车车速的变化曲线,如图4所示。
图4可知,PID控制下,汽车开始减速时存在一定的时滞,而完全停止所需时间较长,汽车制动性能不够理想。Fuzzy PID控制下,系统依然存在时滞,汽车停车所需时间缩短,制动性能有所改善。但车速变化率波动明显,尤其是第二秒时汽车车速变化最明显,不利于汽车制动时驾驶人的舒适度考量。Smith-Fuzzy PID控制下,系统的时滞减小,停车所需时间进一步较少,且车速变化较均匀,适合更为安全且人性化的制动。综上所述,采用Smith-Fuzzy PID控制在汽车制动过程中,可以达到安全,快速、舒适的制动效果。
4 结束语
本文针对汽车制动控制系统中存在纯滞后环节的问题,结合史密斯预估控制器的思想,根据系统动态响应评估结果设计补偿环节,超前地将被控量补偿到控制的输入端,从而消除闭环传递函数中的时滞因子。为了克服史密斯控制器对系统精确模型的依赖,引入模糊PID的方法来描述汽车的车辆模型,提高对系统参数变化的自适应性。该方法同时具有系统纯时滞补偿和自整定PID参数的优点,实现了预期的控制效果。
从图3的仿真结果可以看出,Smith-Fuzzy PID方法并没有完全消除阶跃信号输出响应的超调。此外,系统的时滞时间是一个不确定、不可控的参数,很多情况下受汽车行驶环境的影响,此时如何考量和消除系统的纯滞后需要进一步地研究。
参考文献(References):
[1] 郭星东,郭文龙.基于PID控制的汽车制动系统仿真分析[J]. 交通节能与环保,2016.12(1):30-36
[2] 窦艳艳,钱蕾,冯金龙.基于Matlab的模糊PID控制系统设计及仿真[J].电子科技,2015.28(2):119-122
[3] 王永帅,陳增强,孙明玮,et al.一阶惯性大时滞系统Smith预估自抗扰控制[J].智能系统学报,2018.13(4):500-508
[4] 尹成强,高洁,孙群,赵颖.基于改进Smith预估控制结构的二自由度PID控制[J].动化学报,2019.4:1-9
[5] 杨朋飞,张典,刘逸飞.基于Smith预估补偿的聚丙烯反应器自适应控制系统研究[J].计算机测量与控制,2019.27(2): 56-59
[6] 杨亚,陶红艳.汽车刹车系统仿真研究[J]. 科技创新与生产力,2017.3:117-120
[7] 裴鹏飞.基于模糊PID的车辆ABS滑模变结构控制系统研究[D].太原理工大学,2017.
[8] 平玉环,管志敏,李宗耀.基于Smith预估的模糊自适应主汽温控制系统[J].中国电力,2018.51(11):9-14
[9] 杨宜禥,刘浩洋,岳龙华,et al. 自适应模糊PID技术在发射场供气系统的应用[J].中国空间科学技术,2019.4:1-8
[10] 赵丽,马占有.史密斯模糊自整定PID控制器在温度控制系统中的应用研究[J].煤炭技术,2012.31(12):204-205
- 以市场需求为导向的技工学校物流专业教学改革问题分析
- 大数据时代的技工院校人力资源管理一体化教学模式探究
- 中职职业道德与法律教学中提升学生法律意识的途径
- 基于利益相关者视角的企业新型学徒制研究
- 基于校园文化的技工院校学生核心素养研究
- 中华优秀传统文化融入高职学生思政教育的路径探讨
- 支撑中国制造的澎湃力量
- 第一届全国技能大赛第二次集中技术对接分会场活动成功举行
- 看一看这个特色鲜明的“行校企融合”高峰论坛
- 广州市“羊城家政”人才培养联盟2020年会举行
- 桂林技师学院的“职业教育活动周”系列活动丰富多彩
- 重庆举行高技能人才信息发布会暨康养培训计划启动式
- 技工教育改革发展和技能人才队伍建设
- 技工院校高技能人才培养联盟第四次全体会议暨全国技师学院创新发展经验交流活动在珠海举办
- 弘扬工匠精神传承非遗文化
- 中职学生课余体育锻炼的现状调查与对策
- 高职英语“课程思政”的建构与实施路径探析
- 职业中专语文教学中的微课运用策略
- 黄炎培职业教育德育观在中职学校的应用
- 高职德育学科深度学习的实践与思考
- 基于交叉式项目化实训的汽车检测与维修技术专业教学改革研究
- 京津冀协作建设实训基地,探索工艺美术人才培养新路
- 中职餐饮专业学生职业素养培养分析
- 浅谈《PLC应用技术》线上教学的思考
- 浅析一体化教学课题《楼梯双控灯的线路安装与检测》的设计思路与实施
- title-ˌholder
- titling
- titration
- tits
- titter
- tittered
- titterer
- titterers
- tittering
- titteringly
- titters
- t junction
- t-junction
- t-junctions
- tld
- tm
- tn
- tna
- tnt
- t.n.t.
- tnts
- to
- toad
- to add insult to injury
- to a degree/to some degree
- 白叟
- 白叟黄童
- 白口
- 白口儿
- 白吃
- 白吃一只羊,最后却付了一头牛
- 白吃人家东西,吃白食
- 白吃人家的萝卜还嫌辣
- 白吃干饭
- 白吃猴
- 白吃猴儿
- 白吃萝卜还嫌辣
- 白吃饭
- 白吃饱
- 白吃饱儿
- 白君
- 白听
- 白咧
- 白哗哗
- 白唇鹿
- 白唐
- 白唧唧
- 白商素节
- 白啖
- 白啤酒