
摘 要: CKF是一种新型非线性高斯滤波算法,它依据三阶容积准则,使用数值积分来近似加权高斯积分,无需对非线性模型进行线性化,具有较高的精度和较好的鲁棒性。在传统的锁频加锁相载波跟踪环路的基础上引入了CKF,对载波相位误差、载波频率误差、载波频率变化率误差等参数进行估计,同时将CKF与UKF算法进行了仿真比较。结果表明,在高动态环境中CKF算法对接收机动态信号的跟踪性能优于UKF算法。
关键词: CKF; 非线性滤波; 高动态; 载波跟踪
中图分类号: TN913.6?34 文献标识码: A 文章编号: 1004?373X(2015)03?0051?03
Research on CKL?based carrier tracking algorithm under high dynamic circumstance
JI Bo, SUN Wu, YAO Yuan?fu
(Beijing Institute of Remote Sensing Equipment, Beijing 100854, China)
Abstract: Cubature Kalman filter (CKL) is a new nonlinear Gaussian filter. According to a third?order spherical cubature rule, CKF approximates weighted Gaussian integral by using numerical integral, which does not need linearization of the nonlinear model and has higher precision and reliability. In this paper, CKF is put into the traditional carrier tracking loop which is composed by phase?locked loop and frequency?locked loop for estimating the parameters, such as carrier phase error, carrier frequency error and carrier frequency change?rate. The simulation results show that the carrier tracking loop using CKF algorithm is better than that of using UKF algorithm when tracking high dynamic signals.
Keywords: CKF; nonlinear filter; high dynamic; carrier tracking
0 引 言
近年来,随着导航技术的蓬勃发展,全球卫星导航系统(GNSS)展现出越来越强大的实用功能,高动态卫星接收技术在军事和航天领域更是起到了不可替代的作用。跟踪环路作为高动态接收机的核心环节,其性能的进一步提高显得尤为重要。
在高动态环境下,GNSS接收机和卫星之间很高的相对运动会在接收信号的载波频率上引入很大的多普勒频移及其变化率,这将导致只能适应于低动态、中动态应用环境的传统跟踪环路无法正常工作[1],故提高高动态环境下载波跟踪环路的跟踪性能成为了研究高动态接收系统需要解决的关键问题。
高动态环境下的载波跟踪是一个较强的非线性问题,通常采用UKF算法进行滤波。UKF算法利用确定的离散采样点直接逼近状态的后验分布,无需进行线性化,适应非线性程度较强,精度较高,但其计算量较大,且在高维系统中易出现数值不稳定现象[2]。
CKF(Cubature Kalman Filter)算法[3]作为一种新型的非线性滤波算法,其滤波过程与UKF算类似,无需对非线性模型进行线性化处理。但是相比于UKF,CKF的理论推导更加严谨,且采样点更少。 本文将CKF算法引入高动态接收机的载波跟踪环路中,通过仿真分析其动态性能与跟踪精度,并且与基于UKF算法的载波跟踪环路的跟踪性能进行比较。
1 CKF
通常,针对一个非线性滤波问题,往往难以获得其解析最优解,只能寻找满足贝叶斯准则的次最优解[1]。CKF就是在高斯假设条件下解决非线性滤波问题的一种新型次最优滤波算法。
设状态空间形式的离散非线性系统为:
针对载波跟踪环路,分别使用常见的UKF算法与本文设计的CKF算法进行仿真测试,以载波跟踪环路的跟踪频率均方根误差作为考量标准,得到如下仿真对比结果:
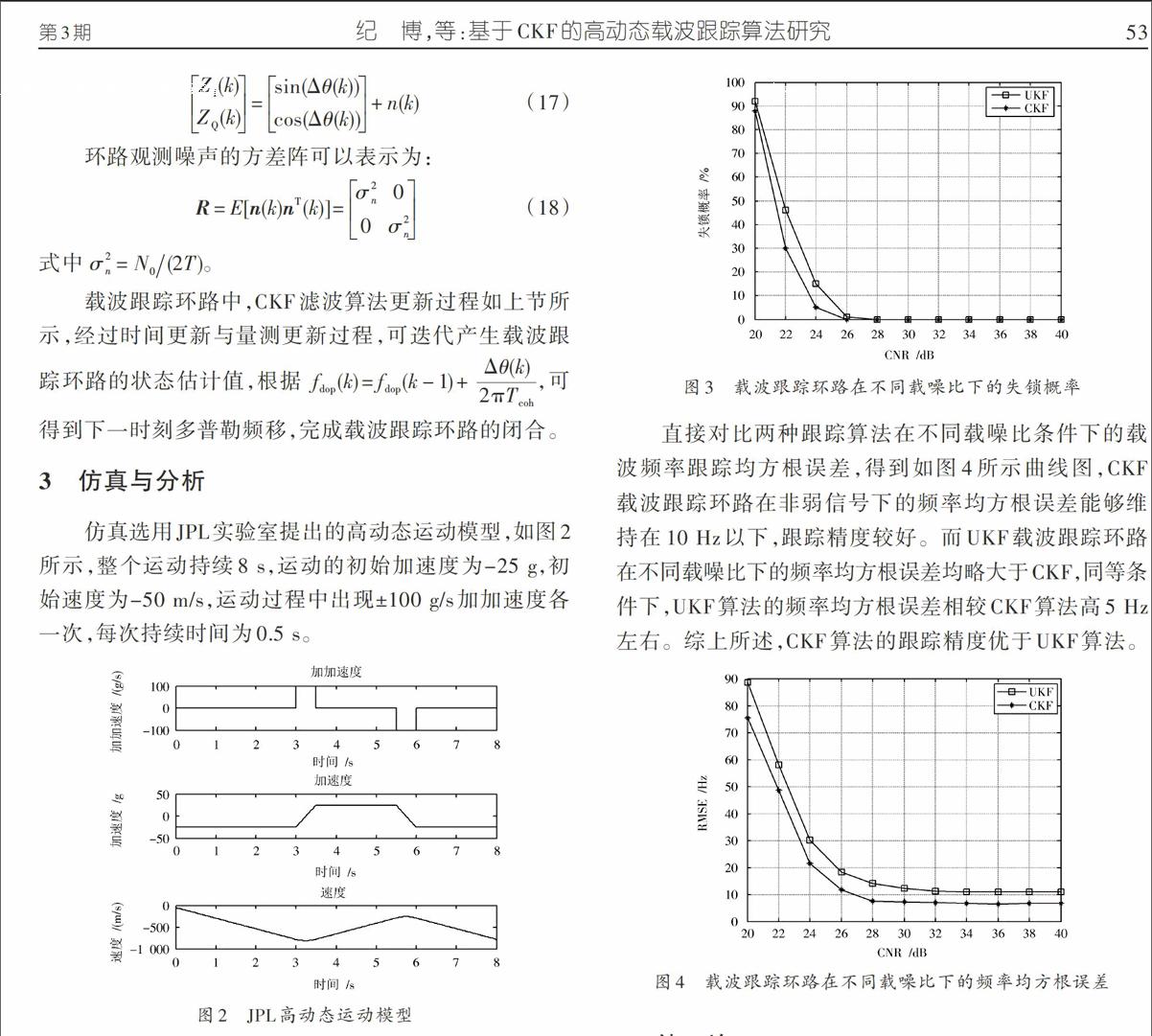
以均方根误差100 Hz作为失锁临界频率,绘制两种跟踪算法的失锁概率曲线如图3所示,可见,当CNR>26 dB时,CKF载波跟踪算法的失锁概率与UKF载波跟踪算法的失锁概率基本一致,均低于10%,跟踪环路工作稳定有效;当CNR<26 dB时,两种算法的失锁概率随载噪比的降低而急剧增加,且相同条件下,UKF载波跟踪算法的失锁概率大于CKF载波跟踪算法。
4 结 论
本文将CKF这一新型非线性滤波算法引入了传统的锁频/锁相跟踪环路,对相位、多普勒频率、多普勒频率变化率及多普勒频率二阶导数等参数进行估计,经过仿真对比CKF与UKF载波跟踪环路的失锁概率与频率均方根误差,可以得到CKF算法在动态性能与跟踪精度上皆优于UKF算法,且通过对计算量的粗略估计可以得出,CKF算法的复杂度略低于UKF算法。
参考文献
[1] ELLIOTT D K, HEGARTY C J. GPS原理与应用[M].寇艳红,译.2版.北京:电子工业出版社,2007.
[2] JULIER S J, UHLMANN J K, DURRANT?WHYTE H F. A new approach for filtering nonlinear systems [J/OL]. [2013?09?12]. http://www.docin.com.
[3] ARASARATNAM Ienkaran, HAYKIN Simon. Cubature Kalman filters [J]. IEEE Transactions on Automatic Control, 2009, 54(6): 1254?1269.
[4] 魏庆喜,宋申民.无模型容积卡尔曼滤波及其应用[J].控制与决策,2013,28(5):769?773.
[5] 唐李军.Cubature卡尔曼滤波及其在导航中的应用研究[D].哈尔滨:哈尔滨工程大学,2012.
[6] PESONEN H, PICHE R. Cubature?based Kalman filters for positioning [C]// Workshop on Positioning Navigation and Communication. [S.l.]. IEEE, 2010: 45?49.
[7] 蔡庆宇,张伯彦,曲洪权.相控阵雷达[M].北京:电子工业出版社,2011.
[8] 潘伟萍.高动态直扩信号跟踪算法研究[D].北京:北京理工大学,2011.
[9] 唐学术.高动态GPS接收机的捕获与跟踪算法研究[D].北京:北京理工大学,2008.
[10] 向洋,胡修林.基于最大似然估计的高动态GPS载波跟踪环[J].电子学报,2010(7):1563?1567.
- 基于信息技术提高小学科学实验教学有效性的研究
- 绽放美育教学之花
- 新媒体技术在民办高校党员培养中的应用探析
- 巧妙开展小学英语经典故事教学的尝试
- 浅谈小学英语语法教学
- 巧用故事补白策略 增强课堂教学实效
- 基于读写结合的小学语文阅读教学探究
- 素质教育背景下小学语文教学改革探析
- 关于小学语文作文教学中的生本教育探讨
- 小学语文教学中培育学生对传统文化的亲切感
- 信息技术在小学语文阅读教学中的渗透
- 巧用信息技术 激活语文课堂
- 如何在语文教学中培养低年级学生的合作意识
- 基于核心素养教学理念下的小学语文教师角色转换研究
- 立足文体,优化策略
- 轻启一扇窗 让语文课堂有“米”可炊
- 书香浸润童年
- 活跃小语课堂气氛有良方
- 个性化角度下的小学语文作文教学探究
- 谈课外阅读在小学语文作文教学中的重要性
- “抓住重点词句,促进小学生阅读感悟”方法探索
- 小学语文课外作业的布置应力求做到“三性”
- 运用信息技术激发学生学习语文的兴趣
- 慧读绘本,妙引课堂
- 浅谈如何培养低年级学生的朗读能力
- blackberrys
- blackbird
- blackbirded
- blackbirds
- dessertspoons
- destabilise
- destabilised
- destabilises
- destabilising
- destabilization
- destabilizations
- destabilize
- destabilized
- destabilizes
- destabilizing
- destainer
- destainers
- destination
- destinations
- destination site
- destinationsite
- destination store
- destinationstore
- destined
- destinies
- 百衲本
- 百衲衣
- 百裂
- 百褶裙
- 百计
- 百计千心
- 百计千方
- 百计千谋
- 百计迭出
- 百词莫辨
- 百试
- 百试不爽
- 百语不如一默,百动不如一静
- 百说
- 百请
- 百读
- 百读不厌
- 百谋千计
- 百谪
- 百谷
- 百谷王
- 百谷虎
- 百貨
- 百败不折
- 百货