李云飞 杨贺刚 商俊辉 杨晰予 高涵豫
摘要:“智能助老起坐椅”適用于腿脚不便的人群,尤其是因年迈体衰、关节受损、慢性疾病、偏瘫中风引起的站立、坐下、行走康复锻炼困难的老年人,能够帮助他们轻松站起与坐下,同时能够调节座椅行走的速度辅助老人行走以及康复训练,从而提高老年人的生活自理能力,增强了老年人群体的幸福感。该产品具有的“起立”“坐下”“躺下”“移动”等功能,能够极大方便老年人的日常生活。该装置价格便宜,可广泛应用到每个家庭,具有良好的市场前景。
关键词:起坐椅;起立;坐下;躺下;移动;康复锻炼
目前中国人口已经进入老年型,老年人口高龄化趋势日益明显,60岁及以上高龄老人正以每年5%的速度增加,预计到2040年将增加到4.1亿人,而65岁及以上老年人口占总人口的比例将超过20%,可以预见,21世纪前期将是中国人口老龄化发展最快的时期。
针对智能轮椅的研究已有相当长的时间,但是基本上多为残疾人设计,而老年人群体属于自然的生理退化,尚未构成残疾,更不是患者,而且智能轮椅价格昂贵,并没有被广大用户消费群体接受。而且同时研究发现在长时间使用轮椅过程中,有身体疲劳、腰疼等不适的现象的出现,而且长时间坐在轮椅上可能会使老年人下肢肌肉力量衰退的情况更为严重,最后使老年人仅剩的运动技能荒废[1],严重影响了老年人的身心健康,给家庭和社会带来了巨大的负担。
一、智能助老坐椅总体结构设计
(一)功能设计
本座椅机器人的主要功能包括:自动升降椅座可任意调节使用高度,智能辅助起立,智能辅助坐下,座椅站立模式、移动模式、座椅模式、平躺模式四种形态的随意切换,以及座椅站立模式下智能调节移动速度辅助使用者进行康复锻炼[2]。
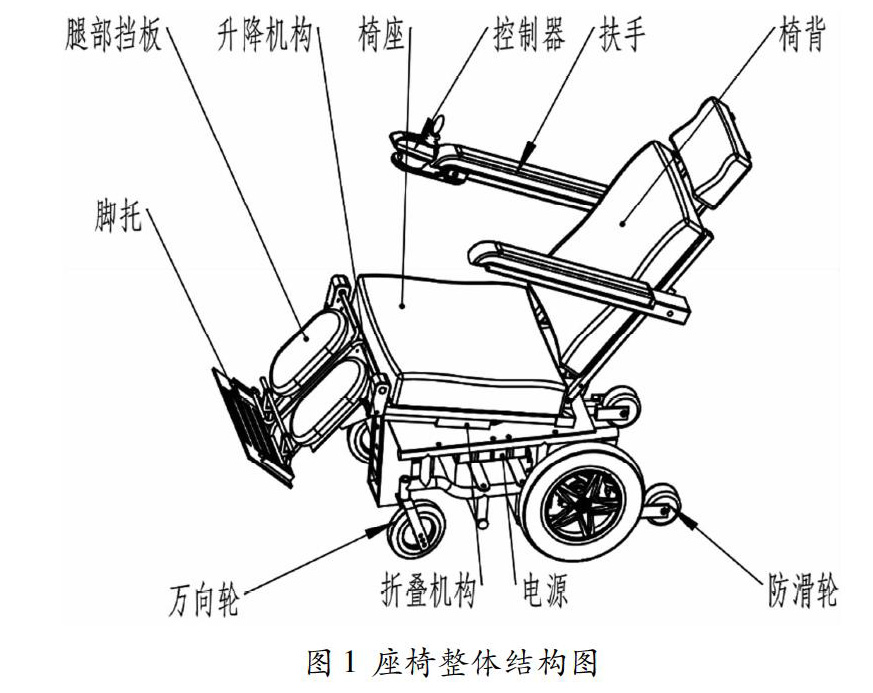
(二)轮椅总体结构
该机械主要有三大主要结构组成,分别是椅背结构、底座结构、腿部结构。
椅背结构与底座结构之间通过杆件与轴承配合链接,通过伸缩杆调节角度;腿部结构和底座结构亦是如此。
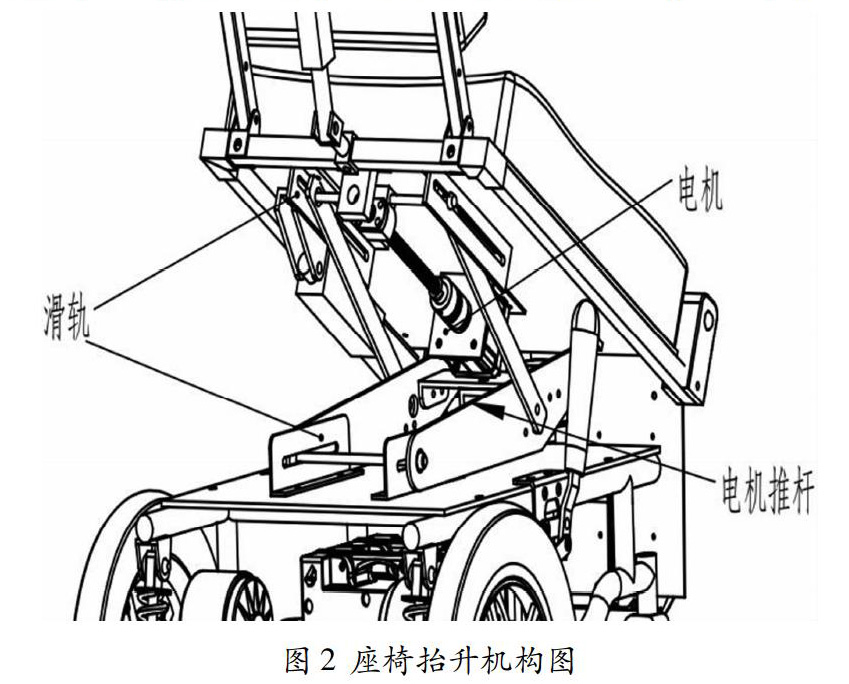
(三)座椅连杆滑块抬升机构
我们的产品支撑板上部与上底板铰接,中部与连杆铰接,下部通过光杆2连接于滑轨2上,连杆通过光杆与滑轨相配合步进电机通过联轴器与丝杆相连,滑块与丝杆相连接。步进电机启动,丝杆带动滑块做平移运动,滑块带动连杆旋转,连杆带动支撑板旋转,上底板抬起。(如图2所示)
二、智能助老起坐椅各部分工作原理
本产品的独特之处在研发过程中考虑了老年人目前的因腿部力量不足而无法正常行走甚至不能行走的情况,充满人道主义精神,进行对于这类群体的辅助,以及帮助行动不便或者生活中存在安全隐患的老人群体,解决老人起坐、躺倒起身等困难,甚至可以有效使老人脱离意外受伤带来的痛苦,从而使年老者可以安心舒适的享受晚年生活[3]。根据实现功能的不同,该产品工作时可分为四种模式,分别是助老行走模式、助老站立模式、助老座椅模式和助老躺椅模式。
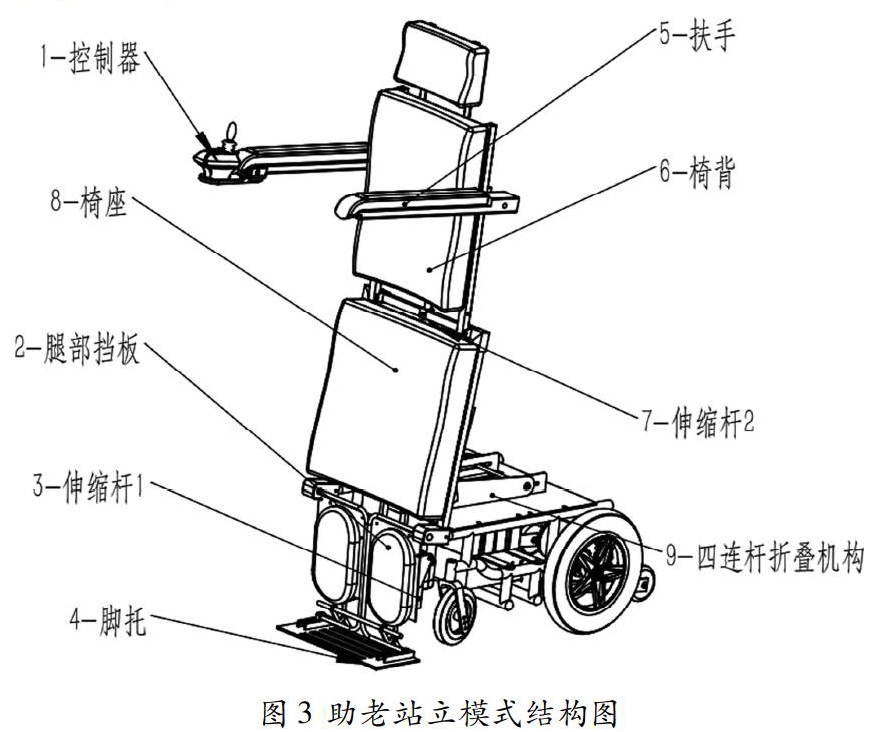
(一)座椅辅助站立模式
全自动助老起坐座椅在完成助老站立(如图3)动作时分为两个过程,第一过程是老人以坐姿坐在椅子上时椅子是折叠状态,此时当老人通过控制器按钮(图3:1-控制器)发出起立指令进入第二个过程。腿部挡板(图3:2-腿部挡板)后侧的电机(图4:1-电机)带动丝杠(图4:2-丝杆)旋转收缩,拉动平放在脚底下的脚托(图4:5-脚托)旋转至座椅腿部挡板后侧竖直存放好。椅背(如图3:6-椅背所示)、椅座(如图3:8-椅座所示)、腿部挡板同时运动,此时椅背后侧伸缩杆收缩,带动椅背运动,使椅背逐渐与椅座在同一平面。同时椅座后侧电机带动丝杠转动拉伸,推动椅座独特的四连杆折叠机构进行空间错位运动向上展开,将椅座推至垂直高度最终椅背、椅座、腿部挡板处于同一竖直平面处,此时座椅完成直立运动。整个过程的速度适中,并且椅背、椅座、腿托三者同时配合运动,此时人体整个是靠在椅子上面,为保证安全性老人可以系好安全带,确保老人在三者运动的过程中可以紧紧贴合座椅。
(二)座椅辅助移动模式
座椅在助老站立模式下,按下控制器(图3:1-控制器)按钮,腿部档板后侧的电机(图4:1-电机)带动丝杠(图4:2-丝杆)旋转收缩,拉动平放在脚底下的脚托(图4:3-腿部挡板)旋转至座椅腿部挡板后侧竖直存放好(脚托结构图如图4所示)。此时后轮大扭矩直流电机开始转动使座椅向前移动(座椅将装有速度控制器用以调节后轮的行进速度),双手抓牢座椅扶手(图3:5-扶手)便可以在辅助座椅的推动下向前行进,辅助老人进行行走锻炼和以及后期的康健,相当于一个具有全方位防护功能的拐杖。
(三)座椅辅助坐下模式
座椅在完成坐下动作时分为两个过程,第一过程是老人站在脚托上,倚着座椅,通过控制器按钮发出坐下指令。此时进入第二个过程,电机和推杆开始工作,首先在椅座后侧步进电机带动下椅座后侧丝杠旋转收缩,拉动转椅座独特的四连杆折叠机构进行空间错位运动,将椅座平铺放下。在椅座运动的同时椅背后侧的伸缩杆进行拉伸,腿部挡板后侧的丝杠拉伸带动脚托运动至一定角度后水平放置,即让脚平可放在脚托上。在椅座平缓放置水平时,椅背与椅座逐渐接近垂直,三者配合最终完成坐下动作。
在老人以坐姿使用本产品时,可以通过相应按钮分别调节椅背、腿部挡板的角度以及椅座升降机构的高度(三大部分的自由度较高),找到最适合老人身体舒适度的座椅状态。
座椅模式下连接前后轮子和椅子的连接臂可以转动,进而调节各部分结构的高度和角度,人坐在椅子上,变成符合人体工程学的座椅状态。与此同时,可以减少神经血管对于老年群体人脑的压迫,提高人的生活质量,增强老年人晚年生活的幸福感。可以进行事先调整姿态,然后保存,使用者仅仅需要按下按钮就可以达到事先调整好的状态,操作简易,方便老人的使用。
三、结论
本产品“老有所椅”智能助老座椅达到了设计者的初衷,通过将座椅升降结构、座椅连杆滑块抬升机构、伸缩杆等机构相结合,实现座椅的智能起坐、辅助行走、任意自动切换座椅模式、站立模式、躺椅模式等功能,极大提高了使用舒适度,具有智能化程度高、易于操作、安全性能好等优点,较好地解决了目前市场的智能座椅存在的无法自动辅助老人坐下、无法支撑人体独自起立的问题,同时考虑了人体自身的舒适度需要、人性设计,改变人体改变形态、提高了智能机械自动化程度,响应目前的政策号召,以及顺应目前自动化的发展趋势,对于老人身体的康复与锻炼大有裨益。
参考文献:
[1]王兴宇.基于产品设计中人机工程学的研究综述[J].现代装饰(理论),2013(01):110.
[2]吴晓慧.多功能轮椅的结构设计与研究解析[J].科技与创新,2016(17):106.
[3]孙斌宾.低龄老年人智能座椅设计研究[J].艺术品鉴,2018(23):303-304.
- 高职教育存在的问题及对策研究
- 学生视角下影响中外合作办学双语课程的因素
- 高等学校科研秘书工作的若干思考
- 对高校档案信息化建设的思考与探讨
- 湖南高职院校国际交流与合作的SWOT分析
- 以项目全过程设计为主线的课堂教学设计
- 电子商务背景下高校商务英语实践教学改革探讨
- 新媒体环境下英语教学在高校思政教育中的作用
- 材料科学与工程专业物理化学实验教学体系的构建与实践
- 复合型创新人才培养模式下的半导体物理教学改革及教学与科研相结合
- PBL教学法在护理教学中的应用及影响因素
- 高职院校生物化学课程教学改革目标与可行性路径分析
- 初中生物学教学生活化
- “一带一路”倡议下地方高校 国际化发展特点及对策
- 国际化背景下我国大学生 核心能力培育策略研究
- 高职图书馆发挥优势建设校园文化的探索
- 高职院校“教、赛、训、证”一体化教学路径研究
- 高校二级学院行政秘书工作研究
- 新版高校管理规定之下转专业管理工作思考
- 移动信息化教学在线性代数教学中的应用
- 基于微课的混合式教学模式在法语语法教学中的应用研究
- “整体化问题牵引”教学模式在线性代数教学中的实践与思考
- 高等学校本科“计量经济学”教学改革研究
- 基于应用型人才培养的海洋生态学课程教学改进探讨
- 基于职教云的“数控系统”混合式教学实践
- balsa wood
- baltic exchange
- balticexchange
- balustrade
- balustraded
- balustrades
- balustrading
- bamboo
- bamboos
- b&b
- ban
- banal
- banaler
- banalest
- banalities
- banalities'
- banality
- banality's
- banalized
- banalizes
- banalizing
- banally
- banana
- bananas
- bancassurance
- 副作用
- 副使
- 副修课程
- 副册
- 副冠句首
- 副净
- 副刊
- 副动词
- 副博士
- 副县令
- 副反应
- 副句
- 副叶
- 副名词
- 副品
- 副墨
- 副夺主位
- 副妾
- 副字
- 副官
- 副室
- 副宪
- 副家长
- 副导师
- 副将