赵梦龙 王平会 甘俊武 周生强
摘 ?要:文章基于PLC开发设计超声波-紫外线-臭氧智能清洗机,以液位高度和水中的浊度作为监测指标,根据不同物品所需不同清洗及消毒方式不同,开发相关控制程序,可快速高效地清洗餐具、水产品、水果及蔬菜表面的残留物,大大提高表面洁净度且便于实现自动化控制。
关键词:超声波;紫外线;臭氧;清洗机设计
中图分类号:TS255.35 文献标志码:A 文章编号:2095-2945(2020)28-0025-03
Abstract: In this paper, an intelligent ultrasonic-ultraviolet-ozone cleaning machine is developed and designed based on PLC. The height of liquid level and turbidity in water are taken as monitoring indexes. According to the different cleaning and disinfection methods required by different articles, relevant control programs are developed, which can quickly and efficiently clean the surface residues of tableware, aquatic products, fruits and vegetables, greatly improve the surface cleanliness and facilitate automatic control.
Keywords: ultrasonic; ultraviolet rays; ozone; cleaning machine design
前言
传统的果蔬清洗机一般采用喷雾式、刷子式、滚筒式清洗方式清洗物品,其中喷雾清洗方法耗水量大,清洗复杂的材料时有盲区,去污效果不佳;刷子式清洁方法仅适用于洁净根、茎部分,对多叶蔬菜的清洗不利,对于水产品及餐具的清洗,不能杀菌消毒和降解农药残留。“超声波”技术作为一种先进、高效的清洗技术,具有可快速高效地清洗制件表面的残留物,提高表面洁净度,对外形结构复杂、具有狭小缝隙、孔洞的制件可轻松实现清洗,且便于实现清洗自动化控制。国外已经批量生产并广泛应用于农业、工业及日常生活中,为保证消毒充分,本文集成超声波、紫外线、臭氧等清洗及消毒技术,基于PLC设计开发超声波-紫外线-臭氧智能清洗机,依据不同物件清洗消毒的所需清洗和清毒策略,自动化进行清洗消毒,从而达到有效清除污垢,可靠杀菌和降解农药残留的目的。
1 系统的总体设计
超声波-紫外线-臭氧智能清洗机的工作原理系统图如图1所示,超声波-紫外线-臭氧清洗机主要由超声波发生器、紫外线灯、臭氧发生器、超声波换能器、加热器、进出水电磁阀、清洗槽、防水隔板、浊度传感器、液位传感器、控制电路部分组成。
2 硬件设计
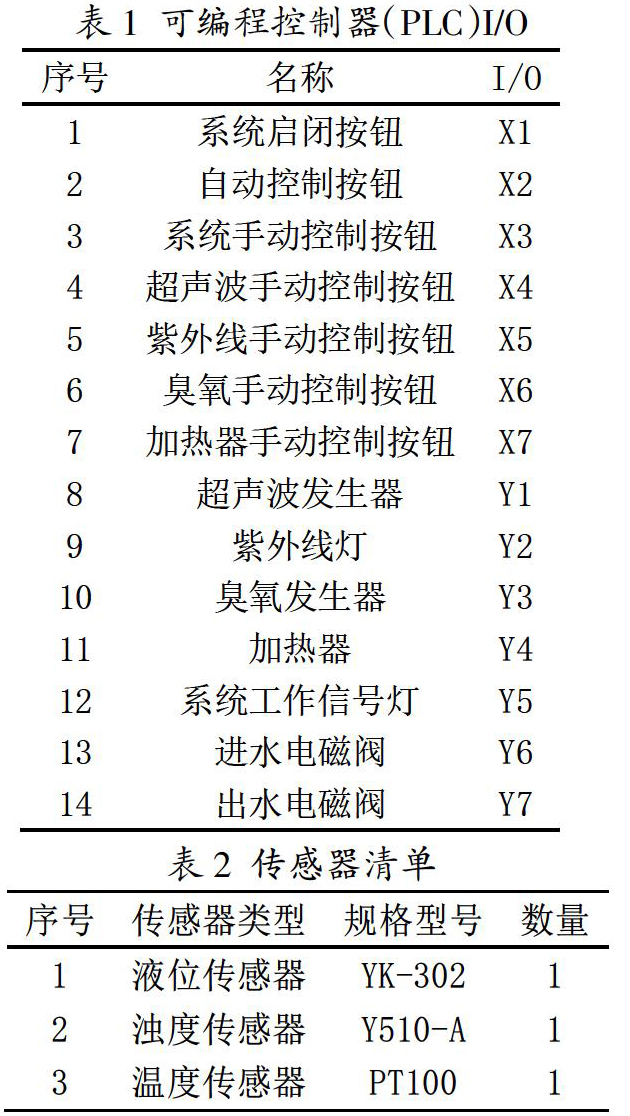
超声波-紫外线-臭氧智能清洗机硬件组成主要包括: PLC可编程控制器、設置在保温水箱内的液位传感器、温度传感器、超声波发生器、超声波换能器、紫外线灯、臭氧发生器、加热器、浊度传感器、控制面板,PLC可编程控制器与上述各工作元件通过导线连接。分析系统所需I/O点数、可编程控制器的可存储量、响应速度,及特殊功能扩展等要求,本系统选用西门子S7-200型,输入点数为13个,输出点数为8个,工作电压为220V, 频率在50Hz至60Hz,输出类型为继电器输出模式,结构紧凑,功能模块配制灵活,可靠性高,在温室环境控制中应用非常广泛。具体的I/O点分布如表1所示。
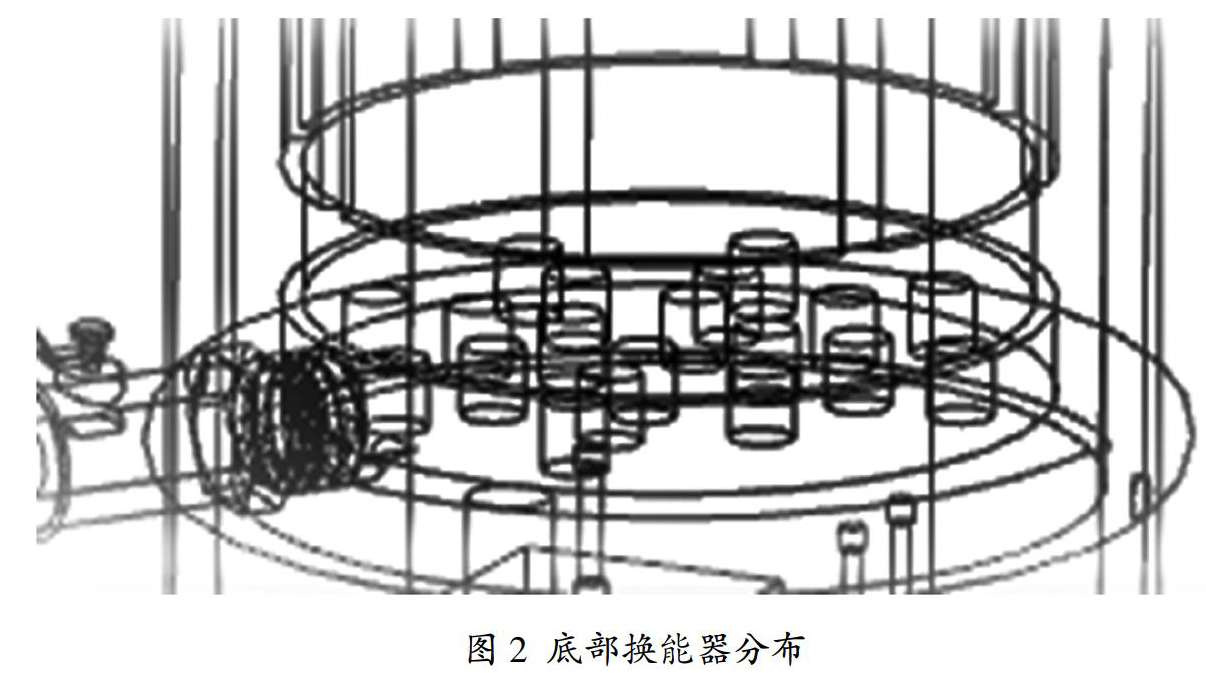
振动板的振动强度取决于换能器在振动板上的分布,从而决定了振动板的清洁度。根据研究表明, 当传感器布置在振动平面上呈三角形时,与矩形排列和方形排列相比,板声源的振幅较大,振动相对均匀,装置采用正三角形排列布置,如图2所示。
3 软件设计
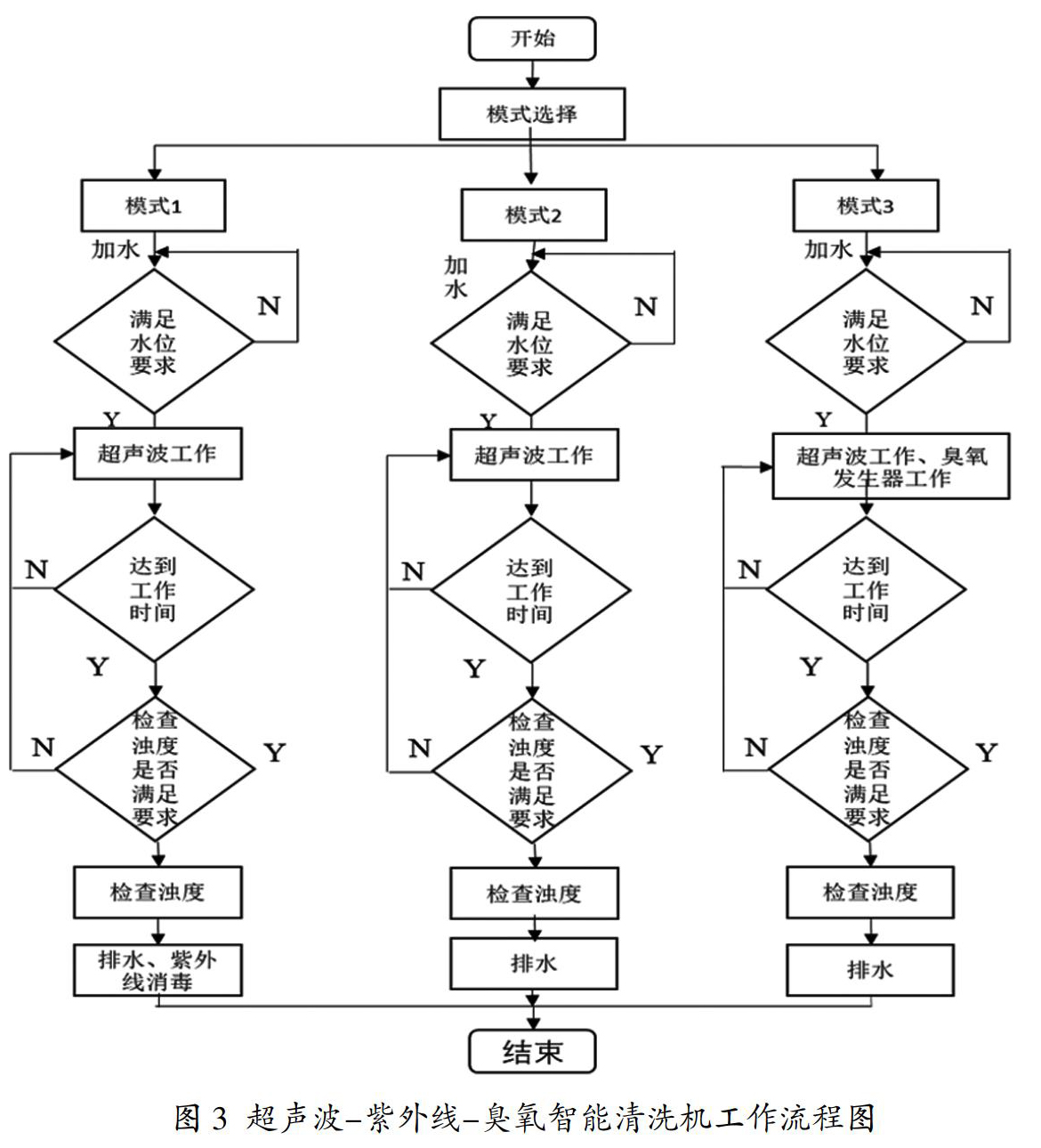
为实现不同物件不同清洗清毒模式的工作,其清洗消毒控制策略为:根据餐具及水产品等物品的特性,设计开发不同的控制程序:清洗消毒均可采用手动及自动控制,其中厨房常见餐具清洗为模式1,小龙虾及螃蟹等水产品为模式2,蔬菜水果为模式3,模式1为超声波先清洗,沥水干净后再进行紫外线消毒;模式2为超声波先清洗;模式3为超声波先清洗+臭氧消毒同时进行。为提高清洗效果,对餐具的清洗中采用加热器对水加温,温度为40℃,自动模式下以液位传感器进行通过PLC控制进水和排水电磁阀进行控制,清洗时间自动控制,当第二次清洗中由浊度传感器采集信息达到控制要求时,清洗过程停止。
针对上述不同模式控制策略用的梯形图语言进行编写,流程图如图3。
4 结论
本文主要基于PLC开发设计了超声波-紫外线-臭氧智能清洗机,以水中浊度为清洗质量监测对象,通过控制超声波工作频率、工作时长,紫外线、臭氧工作时长,根据不同物品对清洗及消毒的特殊需求,设计开发PLC控制程序,该装置提供超声波、紫外线、臭氧等组合的多种模式进行智能清洗,有效实现物品的清洗及消毒,可为蔬菜、水果、水产品及其他小物件降解农药残留物及污渍清洗机的设计提供一种参考。
参考文献:
[1]吴咏,金建,付秀丽,等.超声波、紫外线、超声波协同紫外线对鲜切香菇多酚氧化酶与过氧化物酶的钝化及其机理研究[J/OL].食品工业科技:1-15[2020-06-11].
[2]薛会民,吕雪,梁辉,等.基于超声波皮革清洁原理的多功能清鞋器设计[J].科技经济市场,2017(07):2-3.
[3]赵军嫄,李子富,周瑱,等.超声波/紫外线一体化反应器用于污水消毒的中试研究[J].环境工程学报,2016,10(11):6185-6189.
[4]乔旭东.臭氧-紫外光-超声波协同作用氧化降解苯酚废水的研究[D].天津理工大学,2016.
[5]吴木生,李爱梅,姜新慧,等.超声波紫外线协同杀菌技术在饮用天然水除菌中的应用研究[J].食品工业科技,2015,36(15):126-129.
[6]杨军,王柱峰.机械搅拌、超声波、臭氧、紫外线在清洗中的互补性[J].中国高新技术企业,2013(03):18-19.
- 论供电企业如何实现核算会计到管理会计的转型
- 国有企业管理会计应用探讨
- 长期待摊费用会计与税法处理差异探讨
- 从会计核算角度看行政事业单位固定资产管理存在的几个问题
- 大数据时代会计人员如何为企业高效服务
- 财务共享服务下管理会计的应用及信息化实施分析
- 工业企业加强成本控制研究
- 企业会计岗位职责的划分与编制研究
- 生物医药企业研发支出资本化问题研究
- 旅行社全面成本管理的探讨
- 事业单位内控制度存在的常见问题及对策
- 反腐倡廉高压形势下高校经济责任审计实效性探析
- 地质勘探单位内部审计新途径探讨
- 关于内部审计在企业财务风险控制中的作用研究
- 国有企业绩效审计存在的问题及对策探讨
- 对高校审计档案归集过程的思考
- 做好医院内部审计工作的几点思考
- 基于医院会计内部控制完善的探讨
- 关于破产清算会计若干问题的思考
- 试析新会计准则对会计信息质量的影响
- 企业应收账款风险控制方法研究
- 基于价值链会计视角的企业成本管理模式研究
- 事业单位会计职业风险及规避措施
- 新医院会计制度对医院财务分析的影响
- 煤炭行业转型跨越发展背景下的财务会计创新模式探究
- in the back
- in the background
- in-the-bag
- in-the-balance
- in the balance
- in-the-black
- in the boondocks/boonies
- in-the-bud
- in-the-cards
- in-the-charge-of
- in-the-chips
- in the clear
- in-the-clear
- in-the-clouds
- in the course of/during the course of
- in the dark
- in the direction of sth
- in the distance
- in the dock
- in the employ of sb
- in-the-end
- in-the-event-of
- in the event of
- in-the-event-that
- in the final/last analysis
- 水害
- 水家人的木屋
- 水家装
- 水容
- 水宽养得鱼活
- 水宽鱼大
- 水宿
- 水宿山行
- 水宿风餐
- 水密分舱
- 水寒
- 水少而草木丰茂的沼泽
- 水尽
- 水尽山穷
- 水尽鹅飞
- 水局
- 水屉儿
- 水屋子
- 水屏
- 水山
- 水岸经济
- 水崖
- 水工
- 水师
- 水师舟兵