张娅 许朋

摘要:文章针对Wiener过程和Poisson过程同时驱动的随机系统,研究了保成本控制问题,利用Lyapunov稳定性理论和随机分析理论,给出了保成本控制器的设计方法。最后用仿真说明了该方法的有效性。
关键词:随机系统;Poisson过程;控制
一、绪论
保成本控制是鲁棒控制研究的重要方法之一,经过几十年发展,保成本控制取得了大量的成果。对于随机系统,其保成本控制问题也吸引了研究人员的关注。如对不确定随机非线性系统,设计了输出反馈保成本控制器。
但是,在上述随机系统的保成本控制研究中,系统均是采用Wiener过程来对随机现象进行建模的。但由于随机干扰的复杂性,系统在实际运行中会受到连续型和跳跃型随机干扰的同时影响,此时应建立Wiener过程和Poisson过程共同驱动的随机系统。目前,Wiener过程和Poisson过程共同驱动的随机控制系统的研究已经有了初步的进展。但对于该系统的保成本控制问题,目前尚未检索到相关文献。因此,本文针对Wiener过程和Poisson过程共同驱动的随机系统的保成本控制问题,利用Lyapunov稳定性理论和随机分析理论,设计了保成本控制器。最后用仿真说明了该方法的有效性。
二、系统模型
Wiener和Poisson过程共同驱动的随机系统模型为
dx(t)=[A(t)x(t)+B(t)u(t)]dt+Cx(t)dW(t)+Dx(t-)dN(t)(1)
x(0)=ξ,(2)
这里x(t)∈Rn为状态,u(t)∈Rm为控制输入。W(t)是Wiener过程,N(t)是强度为λ>0的Poisson过程,两个随机过程是相互独立的。x(0)为初始条件,且
A(t)=A+ΔA(t),B(t)=B+ΔB(t),
这里A∈Rn×n,Bn×n是已知矩阵。ΔA(t),ΔB(t)为系统的不确定性,满足
[ΔA(t)? ΔB(t)]=MF(t)[N1? N2] (3)
其中,M,N1,N2为已知矩阵;F(·):R→Rk×l表示未知时变矩阵函数,满足
F(t)TF(t)≤I,?坌t(4)
对系统(1)-(2),将设计如下的状态反馈控制器
u(t)=Kx(t)(5)
其中,K是待定增益矩阵。将控制器(5)代入至系统(1)-(2),得闭环系统(∑C)为
dx(t)=Ak(t)+Cx(t)dW(t)+Dx(t-)dN(t)(6)
x(0)=ξ,(7)
其中,Ak(t)=A(t)+B(t)K。对系统(∑C),考虑成本函数
其中R1,R2是给定的正定矩阵。
本文要解决保成本控制问题是对系统(1)-(2),设计控制器(5)使相应闭环系统(∑C)是鲁棒均方随机渐近稳定,且对于所有的不确定性,性能函数(8)有一个上界。
三、保成本控制器的设计方法
定理1 对随机系统(1)-(2)和成本函数(8)。保成本控制问题是可解的充分条件是如果存在矩阵X>0,Y和标量ε1使得如下LMI成立
其中
Ω11=AX+XAT+BY+YTBT-λX+ε1MMT,
此时保成本控制器为u(t)=Kx(t),K=YX-1,(10)
且成本函数满足J≤E(x(0)TX-1x(0)),(11)
证明:首先证明闭环系统(∑C)是鲁棒均方随机渐近稳定性的。对系统(∑C),选择李雅普诺夫函数
V(t,x(t))=x(t)TPx(t),(12)
其中,P=X-1。则由Ito^公式可知对任意的T>0,
对(13)两边取期望有
这里
DV(t,x(t))=x(t)TΘ(t)x(t)(15)
其中,Θ(t)=PAk(t)+Ak(t)TP+x(t)TCTPCx(t)+λ(I+D)TP(I+D)-λP。
根据(9),易知矩阵Ξdiag(P,P,P,I,I,I)是非奇异的。故
ΞTΩΞ<0(16)
然后利用Schur补公式,即得
另一方面,令利用(3),(4),有
综合(17)和(18),有
Θ(t)+R1+KTR2K<0,(19)
其中,Θ(t)=PAk(t)+Ak(t)T+λ(I+D)TP(I+D)-λP+CTPC.
从(19)知,可以找到一个常数c>0使得
Θ(t)<-cI.(20)
则从(15)和(20),有
DV(t,x(t))≤-cx(t)Tx(t)(21)
此時可知闭环系统是鲁棒均方随机渐近稳定的。
接下来,本文将表明使用控制器(10),成本函数满足(11)。为此,将考虑(12)中的李雅普诺夫函数。(19)表明
R1+KTR2K<-Θ(t),(22)
则
x(t)T(R1+KTR2K)x(t)≤-x(t)TΘ(t)x(t)=-DV(t,x(t)),(23)
对(23) 两边同时从0到T>0积分,然后取数学期望,有
因此,(11)中的上界被满足。
四、数值仿真
考虑线性随机系统(1)-(2)具有如下参数
A=2 00 2,B=1 ? 0.10.2 -1,C=0.3 00 0.3,D=0.2 00.1 0.2,M=0.1 0.20.5 0.2,N1=0.3 00 0.2,N2=0.2 00 0.24,λ=2,F(t)=sint,ξ=0.40.6
R1=1 00 1,R2=2 00 2
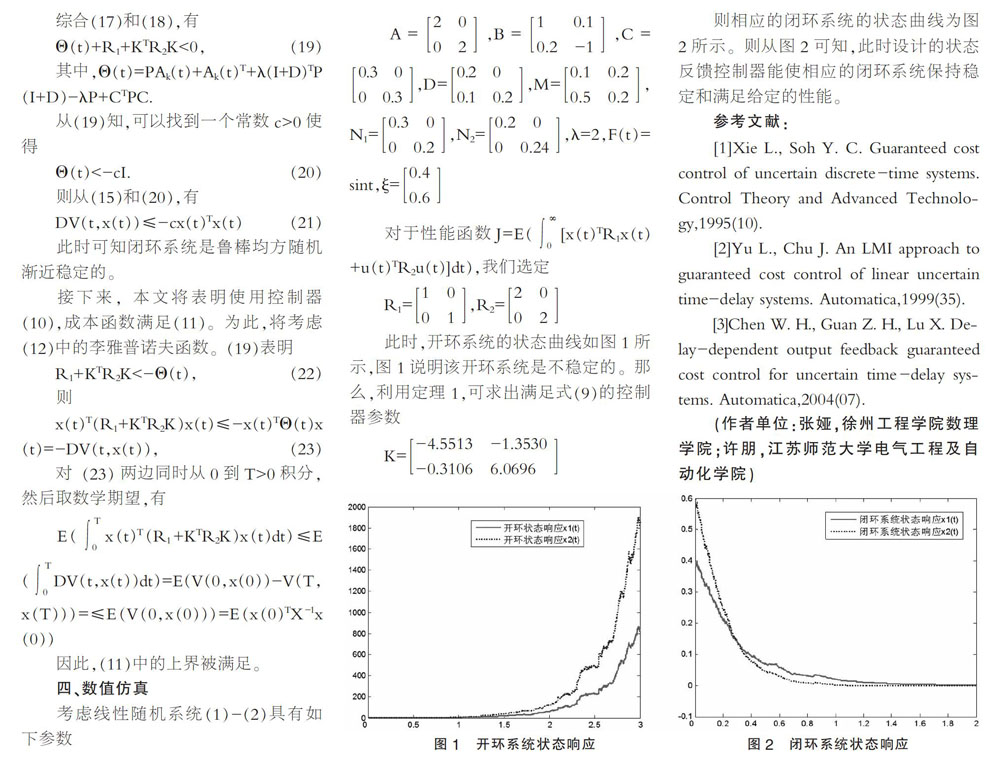
此时,开环系统的状态曲线如图1所示,图1说明该开环系统是不稳定的。那么,利用定理1,可求出满足式(9)的控制器参数
K=-4.5513 -1.3530-0.3106 6.0696
则相应的闭环系统的状态曲线为图2所示。则从图2可知,此时设计的状态反馈控制器能使相应的闭环系统保持稳定和满足给定的性能。
参考文献:
[1]Xie L., Soh Y. C. Guaranteed cost control of uncertain discrete-time systems. Control Theory and Advanced Technology,1995(10).
[2]Yu L., Chu J. An LMI approach to guaranteed cost control of linear uncertain time-delay systems. Automatica,1999(35).
[3]Chen W. H., Guan Z. H., Lu X. Delay-dependent output feedback guaranteed cost control for uncertain time-delay systems. Automatica,2004(07).
- 瑶药关节炎外洗方离子导入治疗膝骨性关节炎的临床疗效研究
- 肿痛消散外敷治疗膝骨性关节炎的临床研究
- 理中汤合枳术汤辅助治疗便秘型肠易激综合征的效果分析
- 小儿高热使用退热药联合中医外治临床疗效观察
- 布地奈德联合氨茶碱治疗老年慢性阻塞性肺疾病急性加重期的临床疗效分析
- 米那普仑联合氨磺必利治疗老年期抑郁症的效果和安全性研究
- 哌甲酯治疗儿童多动症的临床疗效研究
- 盐酸托莫西汀治疗儿童注意缺陷多动障碍的效果探讨
- 10%聚维酮碘乳膏治疗皮肤感染性创面的疗效观察
- 甲氨蝶呤联合雷公藤多苷对中老年类风湿关节炎患者的治疗效果
- 地佐辛联合丙泊酚在无痛输卵管绝育术中的临床应用
- TAPB联合纳布啡对子宫切除术患者术后镇痛及应激反应的影响
- 马来酸麦角新碱辅助治疗产后出血的临床效果分析
- 孕囊内注射甲氨蝶呤治疗子宫瘢痕妊娠的临床效果观察
- 小剂量左甲状腺素辅助治疗早期妊娠合并亚临床甲状腺功能减退症患者的效果及对其甲状腺功能和妊娠结局的影响
- 多西他赛联合顺铂同期放化疗治疗宫颈癌的临床疗效及急性毒性反应评价
- 不同肠道准备方法对胶囊内镜检查图像清晰度及患者耐受程度的影响分析
- 阿托品与间苯三酚治疗急性腹痛的疗效评价
- 硫酸镁复合罗哌卡因切口局部浸润对小儿开腹手术术后镇痛效果的影响
- 曲美他嗪联合瑞舒伐他汀治疗冠心病心绞痛的临床疗效观察
- 血管紧张素受体拮抗剂对阵发性心房颤动合并高血压患者的作用研究
- 大株红景天注射液辅助治疗冠心病心绞痛心衰的效果及对心功能指标和心衰标志物的影响探讨
- 美托洛尔联合阿托伐他汀治疗对心肌梗死患者心功能、凝血功能的影响探讨
- 盐酸米诺环素软膏联合甲硝唑药膜治疗牙周病的临床研究
- 儿童龋齿应用微创去腐技术疗效研究
- boardlike
- board of directors
- boardofdirectors
- boardroom
- boardrooms
- board's
- boards
- board sth up
- board sth ↔ up
- board-up
- boardwalk
- boardwalks
- board²
- board³
- board¹
- boarer
- boarest
- boars
- boas
- boa's
- boast
- boasted
- boaster
- boasters
- boastful
- 太老爷
- 太華
- 太蔟
- 太虚
- 太虚幻境
- 太行八陉
- 太行天藏
- 太行失路
- 太行山
- 太行山上的松——稳不住身(神)
- 太行山上看运河
- 太行山上绣花——又大又细
- 太行山照见运粮河——远水不解近渴
- 太识孤
- 太贱
- 太软
- 太过
- 太过分
- 太迟
- 太迟了
- 太那个
- 太长
- 太阳
- 太阳、月亮周围的光环
- 太阳下面的雪人——不长久