基于红外测距传感器的倒车雷达电路板设计
王丽博 王庆平
摘 要:介绍了一种基于红外测距传感器的倒车雷达电路板,该电路板使用红外发射管和红外接收管作为传感器件,测距进行分段显示。红外测距倒车电路板具有电路结构简单、性价比高、电路工作稳定的特点,可应用于传感器教学课堂、学生电子组装调试学习及各种测距效果演示等场合。
关键词:红外测距;传感器;倒车雷达;电路板设计
中图分类号:TN219文献标识码:A
doi:10.14031/j.cnki.njwx.2019.10.008
0 引言
随着传感器技术快速发展,传感器的应用领域迅猛扩大,其中红外传感器测距的应用案例也越来越多。红外测距传感器具有一对红外信号发射与接收二极管,光线照射到物体后产生反射现象,发射光会反射到接收管,接收管将光能转换为电能,对电能进行处理,计算分析物体距离。本文设计的基于红外传感器的倒车雷达电路板,可以较好地反应出障碍物与电路板之间的距离,并通过三个不同颜色的发光二极管指示距离(测试距离为:10~30 cm)。
1 系统硬件设计
1.1 红外雷达倒车电路板制作方案
汽车开始倒车时,红外传感器时刻检测周围障碍物距离情况,如果在检测范围内有障碍物,则进行指示灯报警。红外倒车雷达电路板主要由多谐振荡电路、红外信号发射与接收电路、红外信号放大及电压比较电路、指示灯显示电路构成。
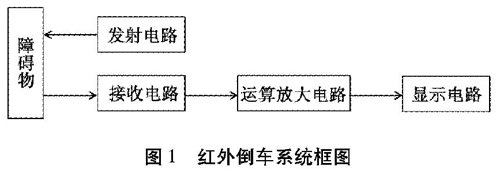
发射电路主要使用功能是将电能转换成近红外光并向外进行辐射,红外接收电路可将红外光转换成电信号。当汽车倒车时,红外传感器件检测汽车后方是否有障碍物,并将障碍物的距离进行指示。红外倒车雷达测距系统组成如图1所示。
红外测距倒车系统主要由发射、接收、处理、显示4个模块构成,电路的核心元件包括NE555和运放LM324。
NE555为8脚集成器件,集成了模拟电路和数字电路,它具有体积小巧、稳定可靠、电源范围宽、适用范围广等特点,外部电路配合少量的电阻、电容即可组成单稳态触发器和多谐振荡器,完成特定的振荡延时作用。故经常使用NE555器件用于产生脉冲波形及波形变换。
LM324属于表面贴装型元器件,是一个四路运算放大器,每一个运算放大器都有5个引出脚,其中两个是信号输入引脚。该运算放大器具有差分输入功能,其工作电压为:3~32 V。
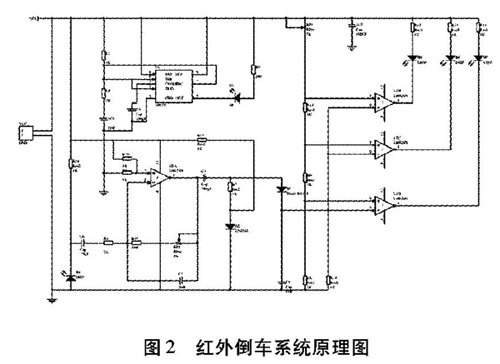
红外测距倒车系统原理结构如图2所示。
发射电路:NE555及周围元件组成多谐振荡器,产生红外波信号,经U1第3脚输出并驱动红外发射管HF发射红外信号。
接收电路:红外发射管发射的红外信号经前方障碍物反射后由红外接收管HJ接收,并送至U2A及周围元件组成的放大电路进行信号放大。
信号处理电路:LM324主要用来放大红外接收信号和构成电压比较器电路。放大后的红外接收信号经U2A的第1引脚输出,信号经C3、D1和C2的耦合整流滤波后送至U2B、U2C 、U2D的反相输入端,反相输入端电压分别与对应的同相输入端电压进行比较,当同相输入端电压低于反相输入端电压时,运算器输出为低电平,从而使得与其连接的发光二极管导通,即LED灯亮。
显示电路:使用三个发光二极管用来指示倒车距离范围。根据LM324电压比较后的结果实现LED5、LED6、LED7三盏指示灯亮灭情况,三盏灯配合指示距离远近的效果。
2 电路调试
安装电路板之前要对所有元器件进行检查,确保所有器件均能正常工作。焊接电路板时,可以使用两根引线直接焊接在PCB的电源和地线上,以便后期调试。
红外倒车雷达电路板采用分步调试的方法。首先,按照原理图检查线路中各个元器件之间的连接关系是否无误,焊接中是否存在漏焊、虚焊、短路等问题。如果线路无问题后就开始进行功能电路检查。
接入9 V工作电压(注意电压正负极不要接反),开始发射电路功能调试。使用示波器观测NE555集成块的输出端(第3引脚)是否有方波信号输出。同时,用万用表测试红外发射管的工作是否正常,观测其两端是否有输出电压即可。发射电路功能调试完成后,开始对发射电路进行功能调试。
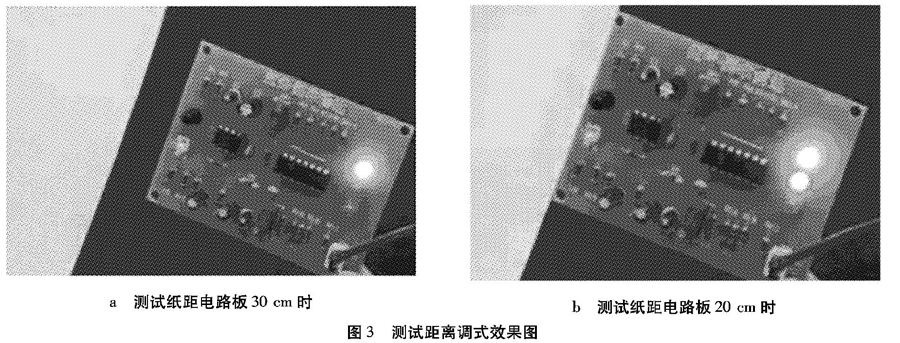
最后,进行整体调试。用物体遮挡红外光发光管,理论上讲此时红外接收管应该可以接收到反射的红外光信号,即车距指示灯LED5、LED6、LED7会亮,但是如果不亮,考虑距离问题,上下调整障碍物距离,同时需要检测振荡电路,使用示波器观察NE555集成块的输出端的输出波形是否正确,然后用万用表排查元器件的焊接情况,排查故障修复好后重新调试,确定没有问题后,可以缓慢调节两个滑动变阻器RP1和 RP2,使两个可调电位器相互配合,最终调整出一个较为合适的阻值,满足障碍物距红外倒车测距电路板30 cm时LED5灯亮,20 cm时LED5、LED6灯亮,10 cm时三盏灯全亮。
3 电路板测试及测试结果
随着障碍物距离越来越近,指示灯个数增加,30 cm时一盏灯亮,20 cm时两盏灯亮,10 cm时三盏灯亮。使用一张白纸进行测距调试,调试效果如下图3所示。
该红外测距倒车电路板使用两个可调电位器RP1和 RP2。其中RP1调节反射距离,RP2调节灵敏度,测试前调节两个电位器,相互配合下可以尝试距离30 cm时LED5亮,距离20 cm时LED5和LED6亮,距离10 cm时三盏灯全亮。
4 总结
通过测试,该红外测距倒车電路板可以在电源供电条件下实现障碍物测距功能,并且随着障碍物距离的改变,指示灯亮的数目也随着改变,距离越近时,发光二极管亮得越多。障碍物在安全测距范围外时,指示灯均不亮,满足汽车倒车指示要求。
(05)
