水产养殖自动投饵机发展现状
于泽 姜忠爱 张靖铎 肖冰峰 曹其政 顾宗文


摘 要:随着水产养殖业的迅猛发展,自动投饵机在国内外都获得了广泛的应用。我国投饵机对比国外先进投饵装置在系统化、自动化、精确度等方面仍有所欠缺。本文针对我国投饵机的发展历程,并围绕投饵机的应用特点,对投饵机发展进行介绍,同时列举国内外的新型投饵机研究成果,借此展望投饵机在未来的发展方向。
关键词:投饵机;水产养殖;自动投饲;智能控制
改革开放以来,我国水产养殖业发展迅猛。随着养殖规模的扩大,人工投饲的不足逐渐凸显出来,例如工作量大、效率低、抛撒不均匀,而且受人体力、环境、天气等因素影响大等。这些因素影响养殖对象的正常生长,增加了养殖成本[1]。因此,大力推广自动投饵机的使用是解放养殖者劳动力、节省时间、减少饲料浪费、提高经济效益的重要举措。国内投饵机的研发始于上世纪80年代,随即被投入使用[2]。到90年代中期以后,养殖户逐渐认识到使用鱼塘投饵机可以提高饲料利用率,产销量才开始大幅度提高。当前国内大部分的投饵机智能化程度较低,主要是以机械化取代人工投饲。相对而言,国外在自动投饲领域发展水平较高,许多国家都有较为完善的智能化投饲系统[3-6],自动投饵机作为系统中的一个单元,受中央控制系统操控,基本实现系统化、精确化、智能化,如图1所示。
1 我国投饵机发展现状
我国水产行业规模巨大,是世界上第一水产养殖大国,可对比于国外的养殖设施水平,我国的水产行业发展却相对滞后,自动化程度较低,尤其体现在投饲方面。多年来,我国对于自动投饲的研究从未止步,并取得一定的成果,成功研发了一些高端自动投饵装备,见图2。21世纪初期,我国投饵机的年产量已经达到16万台,产量仅次于增氧机。到如今,自动投饵机在我国已被广泛使用于水产养殖行业,根据其应用环境、投料形式、动力来源的不同可分为多种类型。
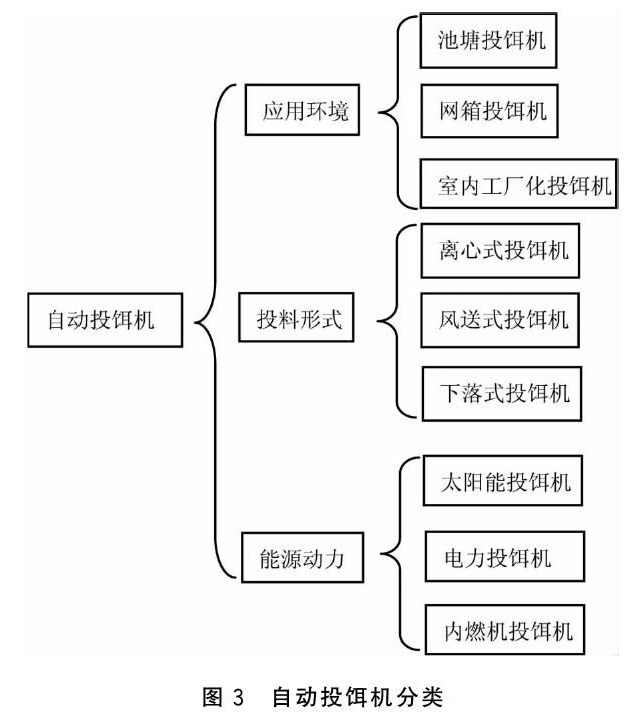
在各类自动投饵机中,以池塘投饵机的应用最为广泛。首台池塘自动投饵机由中国水产科学研究院渔业机械仪器研究所在1978年研制成功[2]。我国大部分的池塘投饵机采用抛洒投喂,根据池塘大小,其抛撒范围在10~50 m2[7],每台使用的面积约0.33~1 hm2[8]。池塘投饵机虽然初步做到定时定量,然而饲料抛洒不均匀,抛洒面积有限,无法做到精确投喂,不但会导致饲料浪费和水质污染还会对池塘内养殖对象的平均长速存在一定影响。对于其它养殖环境,还有网箱投饵机与室内工厂化投饵机等类型的自动投饵机。网箱投饵机又根据网箱使用状况的不同分为水面网箱投饵机与深水网箱投饵机,此类投饵机由河南省水产科学研究院发明并申请专利[9]。网箱投饵机直接将饲料抛撒在25 m2(长5 m×宽5 m)的网箱水面中央,抛撒面积约在2.8~3.2 m2[10]。养殖时,网箱周边饲料会随着水流涌出造成浪费,因此网箱投饵机的投饲区域需位于网箱中央且投饲面积不能过大,安装方式可选择悬挂于网箱上方,但需考虑抗风浪能力及稳定性。室内工厂化投饵机[11]一般用于用于工厂化养鱼和温室养鱼,这种投饵机每次抛撒的饲料数量不多,但很均匀精确,一般抛撒面积在0.8~1.2 m2。此类投饵机可以联网监控,实现远距离的自动化管理。其养殖成本较高,但可以实现精确投喂和鱼类生长状况的实时反馈,这类智能投饵机是目前智能控制投饲系统的缩影。除了适用于不同养殖环境的自动投饵机,还有采取不同投料方式的离心式投饵机、风送式投饵机[12]、下落式投饵机,以及采用不同动力源的电力投饵机[7]、太阳能投饵机[13]、内燃机投饵机[7]等等。以上各种类型自动投饵机均适应不同的养殖环境与养殖对象,极大提高了养殖效率,但基本上都存在一定的缺陷,例如智能化程度低、精度不足、受天气环境因素影响大、存在一定安全隐患等等。
当前自动投饵机种类按照不同的分类方法分为多种类别,如图3所示。
对比于传统的人工投饲,自动投饵机在我国的使用已相对广泛,解决了费时、费工、劳动强度大、浪费饲料等诸多弊端,可仍存在许多问题。其中就包括安全隐患问题、抛投均匀性较差的问题以及智能化程度较低的问题[14]。
投饵机的安全事故近年来频繁发生,主要是由于投饵机机壳带电,养殖户触电落水身亡[14]。投饵机长期处于水上作业,容易受潮发生故障,工作环境不确定,经常处于无遮盖、条件恶劣的户外工作环境。许多户外的不确定因素,如雷击、线路老化、鼠类啃食等,都会导致投饵机故障和漏电。故障的投饵机会运转异常甚至停止运转,部分养殖户缺乏足够的安全意识与用电知识,容易造成触电。而投饵机长期工作容易导致线路老化从而漏电,养殖户下水进行工作时也可能发生触电。投饵机造成的触电事故屡见不鲜,除了要求养殖户具备足够的安全意识和用电知识以外,还需要制造厂商进行足够的耐压测试,保证投饵机的质量与可靠性。从未来的投饵机研究趋势来看,应以提高投饵机的安全性,保障养殖人员的人身安全为前提。
在2009年,我国渔业机器质量监督检验中心修订了投饵机行业标准,五家代表性投饵机制造企业被选中进行了“抛投均匀性”实验。通过汇总结果得知,机械离心式投饵机的抛投均匀性普遍较差。究其原因是抛投盘的安装角度不合理。因此,投饵机生产企业应仔细校对抛投盘起始角度,并进行“抛投均匀性”试验,选定适宜抛投角度,确保均匀性,实现饲料均匀分布[14]。
目前的投餌机仅可以做到定时定量投饲,却不能理想控制投饲速度和抛撒面积。养殖对象对饲料的需求量、长速以及饲料的转化率都是根据水温、氧浓度、水流速度、光照强度和白昼长度的改变而改变,同时也受饲料品质与养殖对象的年龄、成熟度、性别、激素水平等生理因素影响[14]。传统投饲机的养殖户几乎难以精确掌握最能满足养殖对象需求的投饲水平。因此,国内诸多专家和企业正试图实现投饲系统的智能控制。这类投饲系统大多以PLC为核心,例如胡昱和郭根喜研发的基于PLC的深水网箱自动投饵系统,该系统通过继电接触器来控制各个设备的启动停止、动态定时、定点以及定量的投饲,实现精确投饲[15]。赵思琪和丁为民研发的基于模糊逻辑控制的鱼塘养殖精准投饲系统[16],该系统通过水质监测系统获取水体水质参数,再根据投饲决策模型计算出投饲量,完成精确投饲作业。此类投饵装置较为智能化,具备较高精度,但设计复杂、价格高、适应面窄,对于我国不同地域以及不同种类养殖对象无法做到绝对适配,缺少囊括不同水体水质状况与不同水产生物生长特征的投喂数据库,不能普及使用。较为简单的自动投饵设备有洪扬、陈晓龙研发的蟹、虾养殖池塘移动投饲装置[17],该装置可以实现自动行走投饲,具有投饲均匀、投饲范围广等优点。刘思、罗艳媚、俞国燕研发的轨道式自动投饲系统具有操作简便、投饲均匀、精确度高等优点, 可实现上料、行走、投饲于一体的定点、定时、定量全自动化饲料投喂, 且运行状态和历史数据可实时查询等功能[18]。此类投饵装置虽然实现了投喂的高精度与自动化,但在智能化程度上有所欠缺,没有线上的实时监控以及数据反馈,不利于总结最适合养殖对象的养殖投喂数据。
2 国外投饵机发展现状
国外的自动投饵机广泛应用于室内工厂化养殖,如今已发展成为室内工厂化循环水养殖的大型自动投饲系统,其中包括多单体集中控制式自动投喂系统以及自动投饲机器人系统[3]。
自动投饲系统在挪威、德国、美国等发达国家皆普遍适用于室内工厂化养殖,在饲料传运、储存和投放等多个环节都保证着相当精确的数量控制[19],如图4所示。适用于陆基养殖工厂、大网箱、鱼苗孵化场的自动投饲系统被加拿大相关企业成功研发问世,此类系统针对部分养殖对象开发出不同的投饲控制软件[3],实现高精度控制与数据分析智能养殖。目前世界上深水网箱的自动投饲系统中使用最多的模式之一为美国企业研制出的专为深水网箱设计的具有高精确性、高可靠性、大容量的投喂管理系统。芬兰相关企业研发的机器人投饲系统则主要针对陆基养殖,这套系统由小型漏斗形投饲单元组成,这些投饲单元沿着养殖池上方的轨道移动在各个养殖池之间。系统通过中心计算机控制系统实现无人操作,池与池之间设置不同的投饲程序[4]。日本机械制造企业研发的自动投饲系统施行小料仓投喂模式,在各个深水网箱上方悬挂小型料仓,各料仓通过计算机和控制面板控制投料,多个料仓也可以进行集中控制,还可以通过手机来实现远程操控[5]。挪威渔业装备企业研制的自动投饲系统由管理系统直接控制风机与下料器,实时调节出料量,同时控制在线监测系统并接收在线系统的反馈数据,主要包括各传感器测量的pH、含氧量、温度等水质参数[6],其投喂系统如图5所示。国外的自动投饲系统已经摆脱了传统的单体自动饲料机,形成了高智能化的自动投饲养殖系统,适用于高标准的养殖对象,建立高指标的养殖要求,成本和技术需求较高,适用范围较小。这类投饲系统的关键在于其控制软件的优劣,而我国的大部分养殖对象的价值较低,并不适用这类高端软件的开发与使用。因此,此类高智能化养殖系统的建立,需要扩大我国优质水产品的养殖规模。
3 结论与展望
我国目前的养殖模式和养殖环境决定了还不能应用先进的智能投饲系统。许多小型养殖户在鱼塘中还是只能使用小型的电力自动投饵机。而在海洋牧场中,尤其是在远离海岸的养殖区,没有电力供应,养殖户依然采用人工投喂,如果遇到风浪或阴雨天,投喂难度成倍增加,既威胁养殖户人身安全又影响投喂效果,降低了收益。对此,自动投饵机在未来的首要发展方向为具备一定可靠性的清洁能源投饵机,辅以高精密度的智能投饲控制系统,实时监控,并反馈鱼类生长状况,自动定时定量投喂,做到真正的智能投饲、科学养殖。而且在投饲系统的组成方面可采用模块化设计,投饵机机械本体模块、中央控制装置模块、客户端模块等单独设计,单独选购,通过模块组装做到适应各种水体环境、适合多种养殖对象、适用不同养殖群体的全类型智能投饲系统。
参考文献:
[1] 吴强泽,袁永明.渔用投饲机产品现状及发展趋势[J].江苏农业科学,2015,43(10):458-461.
[2] 焦仁育.投饵机的研究与探讨[J].河南水产,2010(04):40-41.
[3] Qiestad V,Pedersen T,Folkvord A,et al.Automatic feeding and harvesting of juvenile Atlantic cod ( Gadus movhua L.)in a pond[J].Modeling Identification and Control,1987,8(1) :39-46.
[4] Tan P S,Ngoi B,Lee S,et al.A knowledge - based advisor for the automatic selection and sequencing of orienting devices for vibratory feeding[J].Engineering Applications of Artificial Intelligence,1995,8(1) :1-13.
[5] Gundogdu M Y.Design improvements on rotary valve particle feeders used for obtaining suspended airflows[J].Powder Technology,2004,139(1) :76-80.
[6] López M,Martínez S,Gómez J M ,et al. Wireless monitoring of the pH, NH+4 and temperature in a fish farm[J]. Procedia Chemistry,2009,1(1):445-448.
[7] 吳强泽. 池塘养殖智能投饲系统的研究[D].南京农业大学,2016:9.
[8] 李明,洪一前.投饵机的选用与维护[J].新农村,2018(05):35-36.
[9] 焦仁育,王先科,吴小军,等.网箱投饵机的应用与发展[J].河南水产,2011(02):40-42.
[10] 周世明.自动投饵机的种类、结构原理及使用维护技术[J].科学养鱼,2018(09):72-73.
[11] 袁凯,庄保陆,倪琦,等.室内工厂化水产养殖自动投饲系统设计与试验[J].农业工程学报,2013,29(03):169-176.
[12] 成佩庆. 气动式鱼塘投饲机的改进与优化[D].南京农业大学,2015:5-10.
[13] 李玲玲. 太阳能自动投饲机[J]. 渔业机械仪器,1995(05):48.
[14] 葛一健.我国投饲机产品的发展与现状分析[J].渔业现代化,2010,37(04):63-65.
[15] 胡昱,郭根喜,黄小华,等.基于PLC的深水网箱自动投饵系统[J].南方水产科学,2011,7(04):61-68.
[16] 赵思琪,丁为民,张建凯.基于模糊逻辑控制的鱼塘养殖精准投饲系统设计与试验[J].农业现代化研究,2019,40(03):527-536.
[17] 洪扬,陈晓龙,田昌凤,等.蟹、虾养殖池塘移动投饲装置的设计与试验[J].渔业现代化,2018,45(03):9-14.
[18] 刘思,罗艳媚,俞国燕.轨道式自动投饲系统设计与试验[J].渔业现代化,2018,45(01):27-32.
[19] 庄保陆,郭根喜.水产养殖自动投饵装备研究进展与应用[J].南方水产,2008(04):67-72.
(收稿日期:2019-12-19)
