15万吨级重载集装箱船掉头靠厦门港远海17号泊位探讨
陈春洪 周文 王志远
摘 要:本文根据15万吨级重载集装箱船的旋回性,结合笔者多年的引航实操经验,估算掉头操纵拖轮的配备,提出掉头靠泊厦门港远海17号泊位的具体操纵建议,对大型集装箱船的引航操纵具有一定的借鉴意义。
关键词:15万吨级重载集装箱船;掉头;操纵;靠泊
中图分类号:U675 ? ? ? ? ? ?文献标识码:A ? ? ? ? ? ?文章编号:1006—7973(2019)06-0089-02
目前,进出厦门港口的15万吨级集装箱船重载时吃水基本在14米左右,此类船操纵特点是惯性大,富裕水深小,岸壁、浅水效应明显,失去舵效的船速高,受风流压影响明显,其操纵能力严重受限。因此,掉头靠泊对航道、掉头区域的要求非常高,在港内掉头稍不注意就是一个极大的安全隐患。笔者通过十几年的引航实操,结合厦门港海沧港区远海17号泊位调头区实况,总结此类船型在掉头靠泊中应予以掌握的操作技术,提升随机应变的能力,供同行参考。
1 厦門港远海17号泊位情况
厦门远海集装箱码头位于九龙江河口北岸,有14-17号泊位,在远东至地中海、欧洲,北美经由台湾海峡的两大国际航线上,是中国东南沿海对外经济交往的重要门户。厦门港外围大小金门岛、青屿等岛屿形成一道天然屏障,港内水域浪小。
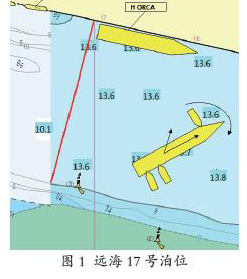
如图1所示,远海17号泊位紧邻新海达18号泊位,掉头区海图水深为13.6m,18号泊位为10.1m,图中用红线分开,14、15、16、17等4个泊位公用一个掉头区,长轴较长,掉头区短轴680m,东西向往复流,流速约2.5节,常规下港内风速不大,实操中涨水掉头时需要提早一个泊位。
2 15万吨船级重载集装箱船旋回性
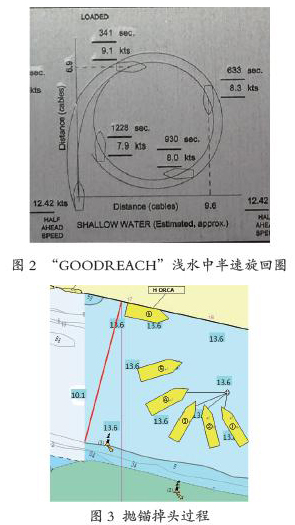
图2为15万吨船级重载集装箱船“GOODREACH”的旋回圈。该船长365.94m,夏季满载吃水16.025m,主机马力MDCR:44118KW×74.3RPM,载重吨(Displacement):158060M/t。图中船舶掉头180°时,降速将近一半,耗时633秒,横距9.6链,旋回的惯性超大,旋回性较差,可见在港区内掉头是一个极其困难的工程。
3 掉头操纵拖轮配备估算
对于同一种拖轮,机器功率越大,拖力也越大。对于大型重载集装箱船,可用下列基于排水量的简单估算公式[1]:
YT=(△/100000×60)+40
式中:△船舶排水量(t)
对于15万吨级的船舶,代入公式可得出所需拖轮总推力为130吨,远海港区配备拖轮马力为52吨,因此掉头操纵需要配备三艘拖轮(厦门港引航规定:船长超过350米,安排三艘拖轮)。对所需拖轮的数量(或总功率)估计不足,安全靠泊就可能得不到保障。
4 引航操纵建议
引航实操中,往往意外频频,因此在平时应注意吸收和总结处理意外事件的经验,对此,总结以下可能采取的技术要点。
4.1合理控制船速
实践中,倘若在余速4节时掉头,由于主机失控(无法倒车),又不借助锚滞速,几乎都会不可避免地撞码头,速度越高,事故概率越高。秉承“宁可慢,也不许快”的思路,应提早放慢速度,没有舵效时,留出时间和冲程来临时冲车,抑制船头偏转,进一步调整船舶掉头前距离码头的横距。
两个关键考量因素:余速和横距。只有在相互参考的前提下,才能够进一步分析余速的快慢或者横距大小,例如,常规靠泊实践中,当船速为4节时,如果此时横距600m,可以称为“余速正常”(在一切设备正常可用),倘若横距>700m,则可称为“余速太慢”,若横距<500m,则可称为“余速太快”;反过来,若横距保持600m,余速>5节,可称为“横距太小”,若余速<3节,则可称为“横距太大”。这是一个“结合互参”的概念,不可单独看待一个指标,就来评判快慢与大小。
此技术缺点是频繁使用车钟,增加车钟命令个数,给接下来使用车钟留下隐患,尤其是主机有可能在此情况下失控,实践中应控制在增加两个车钟命令为宜。
4.2合理操舵
当本船在停车状态下具有微弱的舵效,可下令来回“满舵”,例如:下令“右满舵”后,船头轻微的向右趋势时(转头速率小于0.3度/分),下令“正舵”,并随即下令“左满舵”;同样,船头轻微向左的偏转趋势时,下令“正舵”,如此反复,可适当减速。缺点是若本船在停车状态下,舵效极差,则不可采取此方式。
如图1在17号泊位“向右掉头”,掉头前30秒内,下令左舵,使船头产生向左的轻微偏转,不可过度偏转,在担心“余速稍快”的情况下,可瞬间增加横距。注意点是拖轮的马力不能太小,且左侧应有足够的水域。
4.3综合运用拖轮
常规方式下,船首拖轮一般系在右弦船头,以“拖拽”的方式协助掉头,可改为左弦船头顶推。掉头分成两个步骤:首先保证完成“掉头”,利用拖轮顶推状态下发挥的功效远比拖拽状态下大,增加掉头的转头速率和缩短掉头时间,更大优势会减少船舶往前冲的冲程和增大旋回降速。实验数据表明,船舶在旋回运动过程中,会产生船舶速度降低的现象,称为“旋回降速”,万吨级船舶一般回旋降速达30%~50%,而大型船舶旋回降速更为剧烈,有事甚至可达80%[2]。其次,掉头后,顶推的拖轮再移至右弦船头带缆绳,防止侧推器临时故障,如图1所示。
右弦船尾拖轮带好后,为了不影响本船的偏转,会放长缆绳,应急时,下令“顺着船体前后方向,放缆吃力”,尤其是主机突然失控,余速下不来,此方法是最短时间、最有效的应急之选。缺点是由于船舶宽度,产生力臂而旋转,会造成船头往右偏转。
4.4利用倒车侧向力
试验表明,当h/D<0.65~0.75,就存在沉深横向力,且随着沉深比的减小而增大;厦门港海沧港区处于九龙江口,随着潮汐的涨落,上游的泥沙易被带到下游,造成海沧港区的水质混入更多的泥沙,远海码头此现象更明显,沉深横向力更大。教材上讲述倒车螺旋桨横向力是不可控制的[1],只能采取措施减小影响,而在实践中可充分利用倒车侧向力,如图1所示,降速的同时,右转正是掉头想要的效果。
4.5掉头操纵用锚
海员通常做法以及港口安全要求,进出港备双锚应急。大型船舶锚自重大,操纵用锚时,锚设备受力大,航速控制在1节以内,锚链不宜超过2节水面,水深大于25米时还需用锚机将锚倒出[3],以免刹车负荷过大,一则刹不住使锚链滑出,二则易损坏锚设备,不但没有起到协助掉头的作用,反而增加锚链断裂或者丢锚的风险。
15万吨大型重载集装箱掉头中,落锚点的选择,是最细致的一个环节,如图3的①所示,因为涨水,需要提前一个泊位掉头,所以落锚点为垂直码头横距300米,距离本船泊位400米的这个位置或者附近。①②③④⑤的几个船位图表示抛锚后船舶态势的变化。起锚时机应是当船头和码头垂直后再转将近60°左右,根据船头的偏转速率,如图3的④船位,即可起锚。
4.6利用船上先进导航设备
借助船上先进导航设备,尤其对于驾驶台居船头型,这类船型的船尾位置非常不好辨识,可以借助船舶雷达2分钟之后的船位图、雷达距标圈、ECDIS等其他类似电子海图,进行直观判断船尾能否清爽浮筒、小渔船等碍航物,防止船尾搁浅。
5 结论
本文估算了15万吨级重载集装箱船掉头操纵拖轮的配备,主要探讨其靠厦门港远海17号泊位的掉头操纵的实操技术。在如此狭窄的水域中掉头,操纵一旦开始,则必须使用全力,万不可马虎大意,余速控制自然是最重要参考指标,掉头操纵若能按部就班固然是好,但是实操中情况复杂,驾引人员需具有极强的随机应变的能力,才能适应更加多变的因素。
参考文献:
[1]中国海事服务中心组织编审.船舶操纵 [M].北京:人民交通出版社;大连:大连海事出版社,2008.
[2]洪碧光.船舶操纵原理与技术[M].大连:大连海事出版社,2007.
[3]蒋志豪.大型船舶重载急流中用锚掉头的安全措施分析[J].航海技术,2011(1).
