飞鱼型水下机器人耐压壳结构优化
刘威周 陈炎 张鹭 杨洋


摘要:耐压舱作为水下机器人仪器的重要载体起着至关重要的作用。本文基于Ansys Workbench对飞鱼型水下机器人的耐压壳结构进行有限元分析。在满足强度和刚度要求的前提下,对飞鱼型水下机器人耐压壳结构进行优化,以起到减重降本的目的。
关键词:有限元分析;耐压壳;优化
随着科技的发展及近年来水下环境污染问题的日趋严重,水下机器人技术得以迅速发展,代替潜水员在深水中长时间作业,广泛应用于军、民领域[1]。但当前水下机器人结构多采用传统的流线型圆柱体结构,见图1,此结构存在着体积大、质量重、能耗高、综合效率低、运动能力较差等缺点,不满足当前市场需要。为了改进水下机器人运动性能,鱼型水下机器人应运而生。耐压舱作为鱼型水下机器人探测及传感仪器的重要载体,它的强度关系着水下机器人的最大下潜深度及航行速度。因此,耐压仪器舱设计是水下机器人设计的关键环节。此外,考虑到水下机器人的续航能能力,为保障运行时有着更长的航程和更高的续航力,在保证其结构强度和稳定性的基础上,把减轻重量作为机器人设计时的一项基本要求[2]。本文从减重降本方向出发,在满足强度的条件下对飞鱼型水下机器人的耐压壳进行结构优化。
1 飞鱼型水下机器人模型建立
1.1 飞鱼型水下机器人结构模型
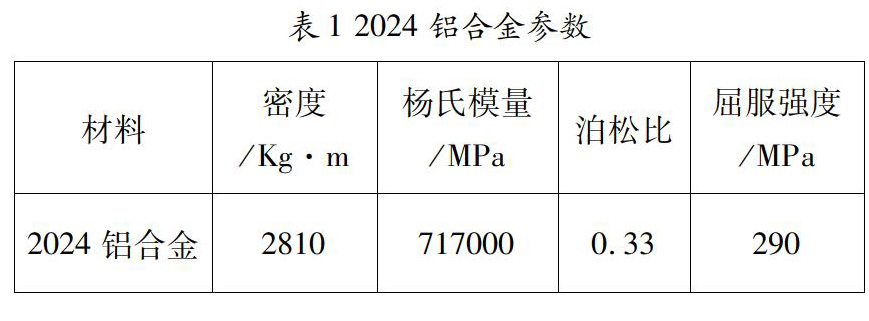
飞鱼型水下机器人结构主要由航行体、飞翼、螺旋桨及固定装置组成。内部舵机带动机翼运动,见图2。航行体内部放置飞控及摄像设备,以达成探索水下区域和实现部分水域范围水质监测的目的。为后期计算需求,现基于三维建模软件Solidworks建立飞鱼水下机器人模型,模型总长度756mm,宽度918mm,结构示意图见图3。航行体耐压壳材料采用2024铝合金,厚度为12mm,具体参数见表1。
1.2 飞鱼型水下机器人结构优化对象
水下机器人的主要结构组成已经在1.1节介绍。现根据要求,在满足强度及刚度要求的前提下对飞鱼型水下机器人的主航行体耐压壳进行结构优化,优化目标为耐压壳厚度。
2 基于有限元法的耐压壳强度计算
为确保内部仪器能安全的工作,在静水压力下耐压壳结构要保证具有一定的强度。因此,分析耐压壳自身的结构强度和刚度是有必要的。本文基于有限元软件Ansys Workbench对耐压壳强度及刚度进行直接计算。
2.1 网格划分
将耐压壳三维模型导入有限元软件Ansys Workbench中,耐压壳选用Solid186单元进行网格划分。Solid186单元是一个高阶三维20节点固体结构单元[3],每个节点有3个沿着x、y、z方向的平移自由度。Solid186单元具有二次位移模式,可更好得模拟不规则的网格,示意图见图4。
2.2 边界条件及载荷计算
考虑水下机器人的最大工作水深为100m,为简化耐压壳有限元分析过程,本文将极限深度的静水压力作为加载载荷,并考虑一定的安全系数(n=1.5),加载压力P=ρgh·n=1.5MPa。耐压壳约束为对称面约束,侧面施加平移约束(UX、UY、UZ),详见图5。
2.3 耐压壳强度结果分析
基于Ansys Workbench对耐压壳进行屈服强度及刚度计算,结果如图6、图7所示。
耐压舱强度依据《潜水系统和潜水器入级与建造规范》[4]进行校核,该规范规定最大Mises应力值小于0.85倍的屈服极限,即σSymbolcB@
由图6和图7计算结果可得耐压壳承受最大强度为9601MPa,小于许用强度[σ]=246.5MPa,故当耐压壳厚度为12mm时,强度满足要求。耐压壳最大变形量为0.0285mm,考虑铝合金材料延展率δ=11%,故刚度满足要求。
3 耐压壳结构优化
从第2章计算结果可以看出,当耐压壳厚度為12mm时,结构留有的安全裕度较大,故考虑对耐压壳结构进行优化,优化对象为耐压壳厚度。对有限元模型进行厚度缩减重新计算,计算结果见表2。
由表2可以看出随着耐压壳厚度的增加,耐压壳承受的应力增加,变形量增加,质量减小。当厚度减少至8mm时,质量减小37.7%,但等效应力(σ=249.06MPa)大于许用强度[σ]=246.5MPa,强度不满足要求。当耐压板厚度减小至9mm和10mm时,其等效应力及变形量皆在安全范围之内,质量减轻量分别为26.1%和19.7%,考虑到10mm铝合金圆筒为标准件,最终方案将耐压壳厚度定为10mm。
4 结语
本文对飞鱼型机器人的耐压壳进行有限元分析,可以发现当耐压壳厚度减小时,耐压壳承受的等效应力、变形量将增加,当耐压壳厚度减小至8mm时,其强度将超过许用应力,不满足使用要求。最后,考虑到实际采购及成本问题,将耐压壳厚度定为10mm。
参考文献:
[1]杨岳,何雪浤,谷海涛,张斌.水下机器人耐压壳体结构优化[J].机械科学与技术,2016,35(04):614-619.
[2]郭珍珍.基于有限元法的水下机器人的结构优化及分析[D].东北大学,2013.
[3]王峰.圆碟形水下滑翔机耐压壳结构优化与装配偏差计算及外形减阻分析[D].大连海事大学,2020.
[4]金鑫.水下机器人耐压仪器舱设计及强度分析[D].哈尔滨工程大学,2018.
